Критерии устойчивости (Лекция)
2. Корневой критерий
3. Критерий Стодолы
4. Критерий Гурвица
5. Критерий Михайлова
6. Критерий Найквиста
7. Показатели качества
8. Прямые показатели качества
9. Корневые показатели качества
10. Частотные показатели качества
Важным показателем АСР является устойчивость, поскольку основное ее назначение заключается в поддержании заданного постоянного значения регулируемого параметра или изменение его по определенному закону. При отклонении регулируемого параметра от заданной величины (например, под действием возмущения или изменения задания) регулятор воздействует на систему таким образом, чтобы ликвидировать это отклонение. Если система в результате этого воздействия возвращается в исходное состояние или переходит в другое равновесное состояние, то такая система называется устойчивой. Если же возникают колебания со все возрастающей амплитудой или происходит монотонное увеличение ошибки е, то система называется неустойчивой.
Для того, чтобы определить, устойчива система или нет, используются критерии устойчивости:
1) корневой критерий,
2) критерий Стодолы,
3) критерий Гурвица,
4) критерий Найквиста,
5) критерий Михайлова и др.
Первые два критерия являются необходимыми критериями устойчивости отдельных звеньев и разомкнутых систем. Критерий Гурвица является алгебраическим и разработан для определения устойчивости замкнутых систем без запаздывания. Последние два критерия относятся к группе частотных критериев, поскольку определяют устойчивость замкнутых систем по их частотным характеристикам. Их особенностью является возможность применения к замкнутым системам с запаздыванием, которыми является подавляющее большинство систем управления.
2. Корневой критерий
Корневой критерий определяет устойчивость системы по виду передаточной функции. Динамической характеристикой системы, описывающей основные поведенческие свойства, является характеристический полином, находящийся в знаменателе передаточной функции. Путем приравнивания знаменателя к нулю можно получить характеристическое уравнение, по корням которого определить устойчивость.

Корни характеристического уравнения (они обозначены звездочкой) могут быть как действительные, так и комплексные и для определения устойчивости откладываются на комплексной плоскости.
Виды корней характеристического уравнения:
положительные (корень № 1);
комплексные сопряженные (4);
По кратности корни бывают:
одиночные (1, 2, 3);
сопряженные (4, 5): si = a ± j w ;
Корневой критерий формулируется следующим образом:
Линейная АСР устойчива, если все корни характеристического уравнения лежат в левой полуплоскости. Если хотя бы один корень находится на мнимой оси, которая является границей устойчивости, то говорят, что система находится на границе устойчивости. Если хотя бы один корень находится в правой полуплоскости (не зависимо от числа корней в левой), то система является неустойчивой.
Иными словами, все действительные корни и действительные части комплексных корней должны быть отрицательны. В противном случае система неустойчива.
Пример 4.1. Передаточная функция системы имеет вид:
 .
.
Характеристическое уравнение: s 3 + 2 s 2 + 2.25 s + 1.25 = 0.
Следовательно, система устойчива.
3. Критерий Стодолы
Этот критерий является следствием из предыдущего и формулируется следующим образом: Линейная система устойчива, если все коэффициенты характеристического полинома положительны.
То есть, для передаточная из примера 4.1 по критерию Стодола соответствует устойчивой системе.
4. Критерий Гурвица
Критерий Гурвица работает с характеристическим полиномом замкнутой системы. Как известно, структурная схема АСР по ошибке имеет вид, как показано на рисунке ниже.
Wp — передаточная функция регулятора,
Wy — передаточная функция объекта управления.

Определим передаточную функцию для прямой связи (передаточную функцию разомкнутой системы): W ¥ = Wp Wy .
Далее с учетом наличия отрицательной обратной связи получаем передаточную функцию замкнутой системы:
 .
.
Как правило, передаточная функция разомкнутой системы имеет дробно-рациональный вид:
 .
.
Тогда после подстановки и преобразования получаем:
 .
.
Отсюда следует, что характеристический полином замкнутой системы (ХПЗС) можно определить как сумму числителя и знаменателя W ¥ :
D з( s ) = A ( s ) + B ( s ).
Для определения устойчивости по Гурвицу строится матрица таким образом, чтобы по главной диагонали были расположены коэффициенты ХПЗС с an +1 по a 0. Справа и слева от нее записываются коэффициенты с индексами через 2 ( a 0, a 2, a 4… или a 1, a 3, a 5 …). Тогда для устойчивой системы необходимо и достаточно, чтобы определитель и все главные диагональные миноры матрицы были больше нуля.
Если хотя бы один определитель будет равен нулю, то система будет находится на границе устойчивости.
Если хотя бы один определитель будет отрицателен, то система неустойчива не зависимо от числа положительных или нулевых определителей.
Пример. Дана передаточная функция разомкнутой системы
 .
.
Требуется определить устойчивость замкнутой системы по критерию Гурвица .
Для этого определяется ХПЗС :
D(s) = A(s) + B(s) = 2s 4 + 3s 3 + s 2 + 2s 3 + 9s 2 + 6s + 1 = 2s 4 + 5s 3 + 10s 2 + 6s + 1.
Поскольку степень ХПЗС равна n = 4, то матрица будет иметь размер 4х4. Коэффициенты ХПЗС равны а4 = 2, а3 = 5, а2 = 10, а1 = 6, а0 = 1.
Матрица имеет вид:

(обратите внимание на сходство строк матрицы: 1 с 3 и 2 с 4). Определители:
 ,
,

Поскольку все определители положительны, то АСР устойчива.
5. Критерий Михайлова
Описанные выше критерии устойчивости не работают, если передаточная функция системы имеет запаздывание, то есть может быть записана в виде
 ,
,
где t — запаздывание.
В этом случае характеристическое выражение замкнутой системы полиномом не является и его корни определить невозможно. Для определения устойчивости в данном случае используются частотные критерии Михайлова и Найквиста.
Порядок применения критерия Михайлова:
1) Записывается характеристическое выражение замкнутой системы:
D з (s) = A(s) + B(s) . e — t s .
2) Подставляется s = j w : D з (j w ) =Re( w ) + Im( w ).
3) Записывается уравнение годографа Михайлова D з( j w ) и строится кривая на комплексной плоскости.
Для устойчивой АСР необходимо и достаточно, чтобы годограф Михайлова (см. рис.), начинаясь при w = 0 на положительной вещественной полуоси, обходил последовательно в положительном направлении (против часовой стрелки) при возрастании w от 0 до ¥ n квадрантов, где n — степень характеристического полинома.
Если годограф Михайлова проходит через начало координат, то говорят, что система находится на границе устойчивости.

6. Критерий Найквиста
Данный критерий аналогичен критерию Михайлова, но работает с АФХ системы, поэтому более сложен для расчетов.
1) Определяется передаточная функция разомкнутой системы .
2) Определяется число правых корней m .
3) Подставляется s = j w : W ¥ ( j w ).
4) Строится АФХ разомкнутой системы.

Для устойчивости АСР необходимо и достаточно, чтобы при увеличении w от 0 до ¥ АФХ W ¥ ( j w ) m раз охватывала точку (-1; 0), где m — число правых корней разомкнутой системы.
Если АФХ проходит через точку (-1; 0), то замкнутая система находится на границе устойчивости.
В случае, если характеристическое уравнение разомкнутой системы A ( s ) = 0 корней не имеет (т.е. m = 0), то критерий, согласно критерию, замкнутая система является устойчивой, если АФХ разомкнутой системы W ¥ ( j w ) не охватывала точку (-1; 0), в противном случае система будет неустойчива (или на границе устойчивости).
7. Показатели качества
Если исследуемая АСР устойчива, то может возникнуть вопрос о том, насколько качественно происходит регулирование в этой системе и удовлетворяет ли оно технологическим требованиям. На практике качество регулирования может быть определено визуально по графику переходной кривой, однако, имеются точные методы, дающие конкретные числовые значения.
Показатели качества разбиты на 4 группы:
1) прямые — определяемые непосредственно по кривой переходного процесса,
2) корневые — определяемые по корням характеристического полинома,
3) частотные — по частотным характеристикам,
4) интегральные — получаемые путем интегрирования функций.
8. Прямые показатели качества
К ним относятся: степень затухания y , перерегулирование s , статическая ошибка ест, время регулирования tp и др.
 Рис. 4.4
Рис. 4.4
Предположим, переходная кривая, снятая на объекте, имеет колебательный вид (см. рис. 1.38).
Сразу по ней определяется установившееся значение выходной величины ууст.
Степень затухания y определяется по формуле
 ,
,
где А1 и А3 — соответственно 1-я и 3-я амплитуды переходной кривой.
Перерегулирование s =  , где ymax — максимум переходной кривой.
, где ymax — максимум переходной кривой.
Статическая ошибка ест = х — ууст, где х — входная величина.
Время достижения первого максимума t м определяется по графику.
Время регулирования tp определяется следующим образом: Находится допустимое отклонение D = 5% ууст и строится «трубка» толщиной 2 D . Время tp соответствует последней точке пересечения y ( t ) с данной границей. То есть время, когда колебания регулируемой величины перестают превышать 5 % от установившегося значения.
9. Корневые показатели качества
К ним относятся: степень колебательности m , степень устойчивости h и др.
Не требуют построения переходных кривых, поскольку определяются по корням характеристического полинома. Для этого корни полинома откладываются на комплексной плоскости и по ним определяются:
Степень устойчивости h определяется как граница, правее которой корней нет, т.е.
h = min  ,
,
где Re ( si ) — действительная часть корня si .
Степень колебательности m рассчитывается через угол g : m = tg g . Для определения g проводятся два луча, которые ограничивают все корни на комплексной плоскости. g — угол между этими лучами и мнимой осью. Степень колебательности может быть определена также по формуле:
m = min  .
.
10. Частотные показатели качества
Для определения частотных показателей качества требуется построение АФХ разомкнутой системы и АЧХ замкнутой системы.
По АФХ определяются запасы: D A — по амплитуде, D j — по фазе.

Запас D A определяется по точке пересечения АФХ с отрицательной действительной полуосью.
Для определения D j строится окружность единичного радиуса с центром в начале координат. Запас D j определяется по точке пересечения с этой окружностью.
По АЧХ замкнутой системы определяются показатели колебательности по заданию М и ошибке МЕ как максимумы соответственно АЧХ по заданию и АЧХ по ошибке.
Связи между показателями качества.Описанные выше показатели качества связаны между собой определенными соотношениями:
 ; tp =
; tp =  ;
;  ; M =
; M =  .
.
Определение устойчивости систем автоматического управления промышленными роботами
Введение
Необходимым условием работоспособности системы автоматического управления (САУ), является её устойчивость. Под устойчивостью принято понимать свойство системы восстанавливать состояние равновесия, из которого она была выведена под влиянием возмущающих факторов после прекращения их воздействия [1].
Постановка задачи
Теория просто и кратко
Анализ устойчивости системы по методу Михайлова сводится к построению характеристического многочлена замкнутой системы (знаменатель передаточной функции), комплексной частотной функции (характеристического вектора):
 (1)
(1)
где  и
и  – соответственно вещественная и мнимая части знаменателя передаточной функции, по виду которой можно судить об устойчивости системы.
– соответственно вещественная и мнимая части знаменателя передаточной функции, по виду которой можно судить об устойчивости системы.
Замкнутая САУ устойчива, если комплексная частотная функция  , начинаясь на
, начинаясь на
стрелки начало координат, проходя последовательно n квадрантов, где n – порядок характеристического уравнения системы, т. е.
 (2)
(2)

Рисунок 1. Амплитудно-фазовые характеристики (годографы) критерия Михайлова: а) – устойчивой системы; б) – неустойчивой системы (1, 2) и системы на границе устойчивости (3)
САУ электроприводом манипулятора промышленного робота (МПР)

Рисунок 2 – Структурная схема САУ электроприводом МПР
Передаточная функция данной САУ имеет следующее выражение [2]:
(3)
где kу – коэффициент усиления усилителя, kм – коэффициент пропорциональности частоты вращения двигателя величине напряжения на якоре, Tу – электромагнитная постоянная времени усилителя, Tм – электромеханическая постоянная времени двигателя с учётом инерции нагрузки (по своим динамическим характеристикам двигатель представляет собой передаточную функцию последовательно соединённых инерционного и интегрирующего звеньев), kдс – коэффициент пропорциональности между входной и выходной величинами датчика скорости, K – коэффициент усиления главной цепи:  .
.
Численные значения в выражение передаточной функции следующие:
K = 100 град / (В∙с); kдс = 0,01 В / (град∙с); Tу = 0,01 с; Tм = 0,1с.
Далее запишем характеристический многочлен замкнутой системы
 заменив s на
заменив s на  :
:
(4)
Решение на Python
Здесь следует отметить, что подобные задачи на Python ещё никто не решал, во всяком случае я не нашёл. Это было связано с ограниченными возможностями работы с комплексными числами. С появлением SymPy можно сделать следующее:
Где I мнимая единица, w- круговая частота, T1= Tу = 0.01 ,T2= Tм = 0.1
Получим развёрнутое выражение для многочлена:
Характеристический многочлен замкнутой системы –
-I*T1*T2*w**3 — T1*w**2 — T2*w**2 + I*w + 1
Сразу видим, что многочлен третьей степени. Теперь получим мнимую и действительную части в символьном отображении:
Действительная часть Re= -T1*w**2 — T2*w**2 + 1
Мнимая часть Im= -T1*T2*w**3 + w
Сразу видим вторую степень действительной части и третью мнимой. Подготовим данные для построения годографа Михайлова. Введём численные значения для T1 и T2, и будем менять частоту от 0 до 100 с шагом 0.1 и построим график:

Из графика не видно, то годограф начинается на действительной положительной оси. Нужно изменить масштабы осей. Приведу полный листинг программы:
Характеристический многочлен замкнутой системы — -I*T1*T2*w**3 — T1*w**2 — T2*w**2 + I*w + 1
Действительная часть Re= -T1*w**2 — T2*w**2 + 1
Мнимая часть Im= -T1*T2*w**3 + w
Теперь уже видно, что годограф начинается на действительной положительной оси. САУ устойчива, n=3, годограф совпадает с приведённым на первом рисунке.
Дополнительно убедится в том, что годограф начинается на действительной оси можно дополнив программу следующим кодом для w=0:
Начальная точка М(1,0)
САУ сварочного робота
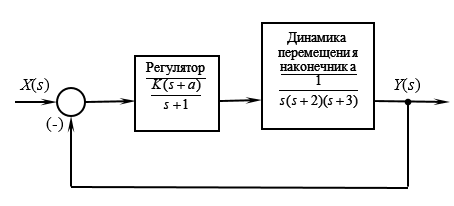
Рисунок 3. Структурная схема САУ позиционированием НСУ
Характеристическое уравнение данной САУ будет иметь вид [1]:

где K – варьируемый коэффициент усиления системы, a – определённая положительная константа. Численные значения: K = 40; a = 0,525.
Далее путём замены s на , получим функцию Михайлова:
 (5)
(5)
Решение на Python
Характеристический многочлен замкнутой системы — w**4 — 6*I*w**3 — 11*w**2 + 46*I*w + 21
Начальная точка М(21,0)
Действительная часть Re= w**4 — 11*w**2 + 21
Мнимая часть Im= -6*w**3 + 46*w
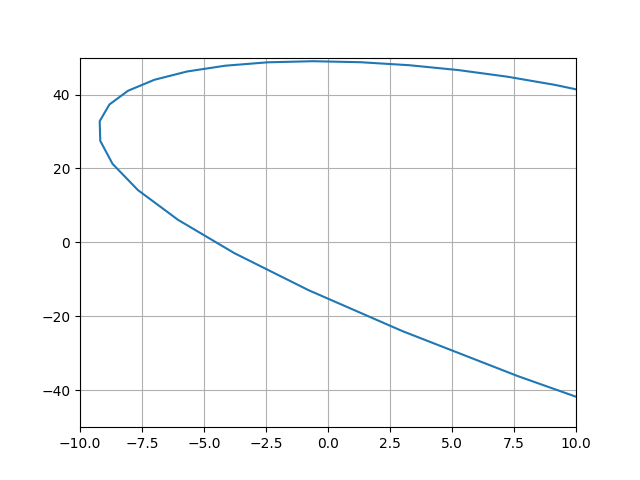
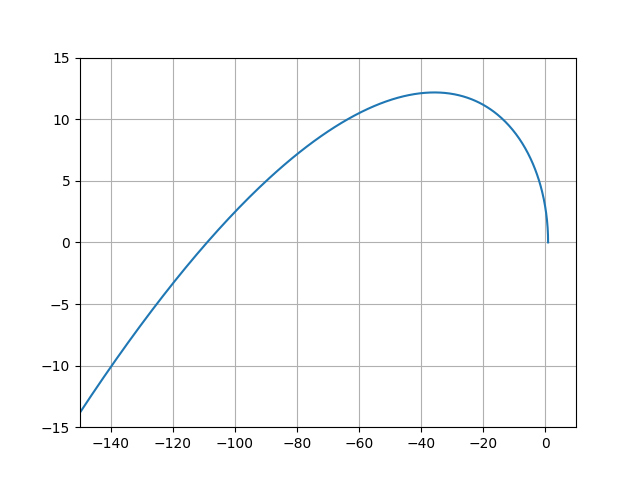
Построенный годограф Михайлова, начинаясь на вещественной положительной оси (М (21,0)), огибает в положительном направлении начало координат, проходя последовательно четыре квадранта, что соответствует порядку характеристического уравнения. Значит, данная САУ позиционированием НСУ – устойчива.
Выводы
При помощи модуля SymPy Python получен простой и наглядный инструмент для решения задач расчёта устойчивости систем автоматического управления, что является обязательным условием работоспособности любого промышленного робота и манипулятора.
Реферат: Устойчивость дискретных систем управления
| Название: Устойчивость дискретных систем управления Раздел: Рефераты по коммуникации и связи Тип: реферат Добавлен 04:40:43 28 августа 2009 Похожие работы Просмотров: 2036 Комментариев: 21 Оценило: 2 человек Средний балл: 5 Оценка: неизвестно Скачать | ||||||||||||||||||||||||||||||||||||||||||||||||||||||
 . (1)
. (1) представляет собой степенное уравнение, при этом число корней уравнения равно степени полинома — n .
представляет собой степенное уравнение, при этом число корней уравнения равно степени полинома — n .

 .(2)
.(2) представляет собой трансцендентное уравнение, при этом число корней уравнения бесконечно, так как они имеют периодический характер.
представляет собой трансцендентное уравнение, при этом число корней уравнения бесконечно, так как они имеют периодический характер. (3)
(3) .
. .
. |
Дискретная система автоматического управления устойчива, если все корни ее характеристического уравнения расположены в левой полуплоскости в пределах основной полосы.
Пример 1. Определить устойчивость дискретной системы с передаточной функцией
 .
.
Решение: Характеристическое уравнение системы имеет вид

Определим корни характеристического уравнения
 .
.
Система устойчива, так как все корни ее характеристического уравнения расположены в левой полуплоскости в пределах основной полосы.
Пример 2. Определить устойчивость дискретной системы с передаточной функцией

Характеристическое уравнение имеет вид
 .
.
Определим корни характеристического уравнения заданной системы
 .
.
Система на границе устойчивости, так как один корень расположен на мнимой оси, а второй устойчивый.
2. Определение устойчивости дискретных систем в форме z —преобразования
Использование z -преобразования позволяет преобразовать трансцендентный полином в степенной, что позволяет упростить процесс исследования дискретных систем управления.
Применение z -преобразования (рис. 2.3) отображает основную полосу на плоскость Z , отрезок мнимой оси  в окружность единичного радиуса, а левую часть полосы в круг единичного радиуса.
в окружность единичного радиуса, а левую часть полосы в круг единичного радиуса.
Следовательно, дискретная система устойчива, если все корни ее характеристического уравнения расположены в левой полуплоскости в пределах основной полосы (т. е. условие устойчивости  ).
).
Пример 3. Определить устойчивость дискретной системы с передаточной функцией
 .
.
Характеристическое уравнение имеет вид
 .
.
Определим корни характеристического уравнения

Определим модуль корней
 .
.
Система не устойчива, так как модуль корней ее характеристического уравнения меньше единицы.
Пример 4. Определить устойчивость дискретной системы, структурная схема которой представлена на рис. 2.
 |
 Рис. 2
Рис. 2
Решение: Передаточная функция разомкнутой дискретной системы
 .
.
Передаточная функция разомкнутой дискретной системы в форме z — преобразования
 , где
, где 
 .
.
Передаточная функция замкнутой дискретной системы в форме z — преобразования
 .
.
 .
.Характеристическое уравнение имеет вид  .
.
Определим корни характеристического уравнения

При этом модуль корня  при любых допустимых T , следовательно, система устойчива.
при любых допустимых T , следовательно, система устойчива.
3. Определение устойчивости дискретных систем в форме w — преобразования
Из теории функций комплексного переменного известно, что билинейное преобразование (w -преобразование, преобразование Мизеса) отображает круг единичного радиуса в плоскости Z во всю левую полуплоскость плоскости W , при использовании подстановки
 или
или . (4)
. (4)
Установим связь между плоскостями Z и W (см. рис. 3).
 |
 |
1. При½z ½ = 1 ,½w+1 ½ = ½w-1 ½, что соответствует оси j.
2. При½z ½ 1 ,½w+1 ½ > ½w-1 ½ — соответствует правой полуплоскости.
Дискретная система автоматического управления устойчива, если все корни ее характеристического уравнения расположены в левой полуплоскости плоскости W .
Следовательно, при использовании билинейного преобразования условия устойчивости непрерывных систем можно использовать для дискретных систем управления.
Пример 5. Определить устойчивость дискретной системы с передаточной функцией
 .
.
Характеристическое уравнение имеет вид
 .
.
Определим корни характеристического уравнения

Система устойчива, так как корни ее характеристического уравнения расположены в левой полуплоскости.
Пример 6. Определить устойчивость дискретной системы, структурная схема которой представлена на рис. 4.
 |
Рис. 4
Решение: Передаточная функция разомкнутой дискретной системы в форме z – преобразования
 , где
, где  .
.
Передаточная функция замкнутой дискретной системы
 .
.
Характеристическое уравнение системы имеет вид
 .
.
Выполнив билинейное преобразование, получим

Условие устойчивости: 1 – b > 0, 1 + b +d > 0, где b = [k(1-d)-(1+d)].
4. Применение критериев устойчивости для дискретных систем
Все критерии устойчивости, которые используются для анализа устойчивости непрерывных систем, могут быть использованы для дискретных систем с учетом некоторых особенностей.
Критерий устойчивости Гурвица можно использовать при применении билинейного преобразования. Рассмотри алгоритм его использования.
1. Записываем характеристическое уравнение D(z) = 0
 .(5)
.(5)
2. Выполняем подстановку  , при этом получим характеристическое уравнение D(w) = 0 , т. е. в форме билинейного преобразования
, при этом получим характеристическое уравнение D(w) = 0 , т. е. в форме билинейного преобразования
 . (6)
. (6)
3. Составляем определитель Гурвица
 . (7)
. (7)
4. Определяем устойчивость также как и для непрерывных систем.
Линейная дискретная система устойчива, если при  определитель Гурвица и все его диагональные миноры положительны.
определитель Гурвица и все его диагональные миноры положительны.
Рассмотрим частные случаи.
При n = 1 характеристическое уравнение имеет вид

При n = 2 характеристическое уравнение имеет вид

Условие устойчивости: a0 > 0, a1 > 0, a2 > 0, а также:
Пример Определить устойчивость дискретной системы, если передаточная функция разомкнутой системы в форме z – преобразования, имеет вид
 .
.
Передаточная функция замкнутой дискретной системы в форме z – преобразования
 .
.
Характеристическое уравнение имеет вид
 .
.
Выполним билинейное преобразование

Система не устойчива.
Критерий устойчивости Михайлова
Доказательство частотных критериев устойчивости базируется на следствии из принципа аргумента. Рассмотрим, как он формулируется для дискретных систем.
Пусть задано характеристическое уравнение замкнутой системы
 . (8)
. (8)
Рассмотрим комплексную плоскость Z (рис. 7), пусть z2 расположен внутри круга единичного радиуса, а z1 вне него.
 (9)
(9)
Если замкнутая система устойчива, то все корни расположены в пределах окружности единичного радиуса, а значит
 (10)
(10)
Замкнутая дискретная система устойчива, если характеристическая кривая D*(jw) при изменении частоты 0 £w£p/T последовательно проходит 2n квадрантов.
Порядок построения характеристической кривой: определяем D(z) ; выполняем подстановку  ; определяем выражение
; определяем выражение
 ;
;
 |
Пример 8. Определить устойчивость по критерию Михайлова системы, схема которой приведена на рис. 6, если T = 1 с, kv = 2 c -1 .
 |
 |
 —
—
Решение: Передаточная функция разомкнутой системы
 .
.
Передаточная функция разомкнутой дискретной системы
 .
.
Передаточная функция разомкнутой дискретной системы в форме z – преобразования

Передаточная функция замкнутой дискретной системы в форме z – преобразования
 .
.
Характеристический полином имеет вид
 .
.

Изменяя частоту в пределах 0 £w£p (0 £w£p/T) строим годограф Михайлова (рис. 7).
|

|
\
| w | 0 | p/4 | p/2 | p3/4 | p |
| X*(w) | 2 | 1+Ö2/2 | 1 | 1-Ö2/2 | 0 |
| Y*(w) | 0 | Ö2/2 | 1 | Ö2/2 | 0 |
Как видно из рисунка система находится на границе устойчивости.
Проверим по критерию Гурвица при
Корень находится на окружности единичного радиуса, следовательно, система находится на границе устойчивости.
Критерий устойчивости Михайлова с использованием билинейного преобразования
При этом исходным является характеристический полином в форме z -преобразования. Выполним подстановку
 (11)
(11)
При этом критерий Михайлова для дискретных систем применяется в таком же виде, как и для непрерывных систем.
Пример 9. Определить условие устойчивости по критерию Михайлова дискретной системы, схема которой приведена на рис. 6.
Характеристический полином имеет вид
.
Выполнив подстановку z = (1+w)/(1-w) , в характеристический полином получим
 .
.
Выполнив подстановку w = j l , в характеристический полином получим

Строим график рис. 8. Система устойчива при kv T > 2. Критический коэффициент усиления равен kv кр = 2/T.

Критерий устойчивости Найквиста
Рассмотрим функцию, которая связывает характеристики разомкнутых и замкнутых дискретных систем
 (12)
(12)
где D*(p) – характеристический полином замкнутой системы;
A*(p) – характеристический полином разомкнутой системы.
В соответствии со следствием из принципа аргумента
 (13)
(13)
Рассмотрим разные случаи.
Система, устойчивая в разомкнутом состоянии
Так как разомкнутая дискретная система устойчива, то она не содержит корней в правой полуплоскости (т. е. m = 0), для того чтобы и замкнутая дискретная система была устойчива, должно выполняться условие
 (14)
(14)
Формулировка критерия Найквиста:
Замкнутая дискретная система устойчива, если амплитудно-фазовая частотная характеристика разомкнутой устойчивой системы не охватывает току с координатами (–1,j0).
Графически это обозначает, что годограф вектора W*(j w ) не охватывает начала координат, а вектора K*(j w ) -точку с координатами (-1, j0 ).
Система, неустойчивая в разомкнутом состоянии
Так как разомкнутая система неустойчива, то она содержит m корней в правой полуплоскости, для того чтобы замкнутая система была устойчива, должно выполняться условие:

Графически это обозначает, что годограф вектора K(j w ) охватывает точку с координатами (-1, j0 ) m –раз.
Формулировка критерия Найквиста: Замкнутая дискретная система устойчива, если амплитудно-фазовая частотная характеристика разомкнутой неустойчивой системы, имеющей m корней в правой полуплоскости, охватывает току с координатами (–1 , j0) m раз.
Пример 10. Определить условия устойчивости и величину критического коэффициента усиления по критерию Найквиста дискретной системы, схема которой приведена на рис. 6.
Решение: Передаточная функция разомкнутой дискретной системы в форме z – преобразования

При этом выражение для частотной характеристики имеет вид

Строим частотную характеристику дискретной системы в соответствии с таблицами 2 и 3 (рис. 9).
Характеристику строим на интервале частот 0 £ w £ p /T в дальнейшем характеристики повторяются, так как они носят периодический характер.
Условие устойчивости данной дискретной системы определяется соотношением kv T/2 = 1 . 0 £w£p/T
| w | 0 | p/2T | p/T |
| P*(w) | -kv T/2 | -kv T/2 | -kv T/2 |
| Q*(w) | -¥ | -kv T/2 | 0 |
 |
| a | 0 | 30 | 45 | 60 | 90 |
| ctga | -¥ | Ö3 | 1 | 1/Ö3 | 0 |
Критический коэффициент усиления системы равен kv кр = 2/Т .
1. Дорф Р., Бишоп Р. Автоматика. Современные системы управления. 2002г. – 832с.
2. Харазов В. Г. Интегрированные системы управления технологическими процессами: Справочник. Издательство: ПРОФЕССИЯ, ИЗДАТЕЛЬСТВО, 2009. – 550с.
3. Чебурахин И. Синтез дискретных управляющих систем и математическое моделирование: теория, алгоритмы, программы. Изд-во: НИЦ РХД, ФИЗМАТЛИТ®, 2004. – 248c.
http://habr.com/ru/post/340554/
http://www.bestreferat.ru/referat-191430.html