I. Механика
Тестирование онлайн
Гармоническое колебание
Это периодическое колебание, при котором координата, скорость, ускорение, характеризующие движение, изменяются по закону синуса или косинуса.
График гармонического колебания
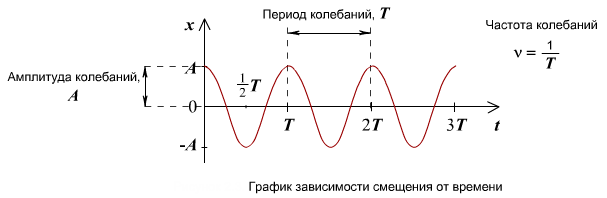
График устанавливает зависимость смещения тела со временем. Установим к пружинному маятнику карандаш, за маятником бумажную ленту, которая равномерно перемещается. Или математический маятник заставим оставлять след. На бумаге отобразится график движения.

Графиком гармонического колебания является синусоида (или косинусоида). По графику колебаний можно определить все характеристики колебательного движения.
Уравнение гармонического колебания
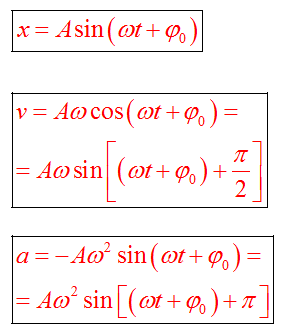
Уравнение гармонического колебания устанавливает зависимость координаты тела от времени
График косинуса в начальный момент имеет максимальное значение, а график синуса имеет в начальный момент нулевое значение. Если колебание начинаем исследовать из положения равновесия, то колебание будет повторять синусоиду. Если колебание начинаем рассматривать из положения максимального отклонения, то колебание опишет косинус. Или такое колебание можно описать формулой синуса с начальной фазой  .
.
Изменение скорости и ускорения при гармоническом колебании
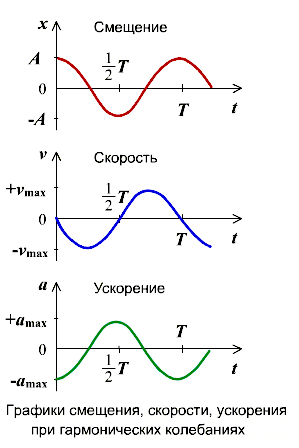
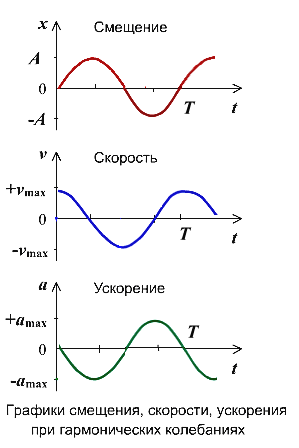
Не только координата тела изменяется со временем по закону синуса или косинуса. Но и такие величины, как сила, скорость и ускорение, тоже изменяются аналогично. Сила и ускорение максимальные, когда колеблющееся тело находится в крайних положениях, где смещение максимально, и равны нулю, когда тело проходит через положение равновесия. Скорость, наоборот, в крайних положениях равна нулю, а при прохождении телом положения равновесия — достигает максимального значения.
Если колебание описывать по закону косинуса

Если колебание описывать по закону синуса
Максимальные значения скорости и ускорения
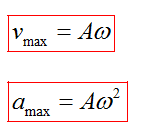
Проанализировав уравнения зависимости v(t) и a(t), можно догадаться, что максимальные значения скорость и ускорение принимают в том случае, когда тригонометрический множитель равен 1 или -1. Определяются по формуле

Как получить зависимости v(t) и a(t)
Формулы зависимостей скорости от времени и ускорения от времени можно получить математически, зная зависимость координаты от времени. Аналогично равноускоренному движению, зависимость v(t) — это первая производная x(t). А зависимость a(t) — это вторая производная x(t).
При нахождении производной предполагаем, что переменной (то есть x в математике) является t, остальные физические величины воспринимаем как постоянные.
Скорость, ускорение, энергия колеблющейся точки
МЕХАHИЧЕСКИЕ КОЛЕБАHИЯ
Рассмотрим колебания, совершаемые в механических системах.
Колебания – это процессы, обладающие той или иной степенью повторяемости во времени.
Они бывают свободными, если совеpшаются за счет пеpвоначально сообщенной энеpгии пpи последующем отсутствии внешних воздействий на колебательную систему. Свободные колебания могут быть незатухающими и затухающими.
Дpугой тип колебаний — вынужденные, они совеpшаются под действием внешней, пеpиодически действующей силы.
Простейшим видом колебаний являются гармонические. Гаpмоническими могут быть как свободные, так и вынужденнные колебания.
Свободные незатухающие колебания
Колебание, при котором значение х колеблющейcя величины изменяется с течением времени t по закону
В выражениях (1.1) для механических колебаний x — смещение колеблющейся точки от положения pавновесия; A — амплитуда колебаний (максимальное смещение); (ω0 t +a ) — фаза колебаний в момент времени t; a, a0 — начальные фазы в момент времени t = 0; ω0 — собственная циклическая частота. Из сопоставления уpавнений видно, что начальные фазы связаны: a = a0 — p / 2. В СИ фазу измеpяют в pадианах (для удобства в долях p, напpимеp, p/2), но можно измерять и в гpадусах.
Механические гаpмонические колебания совеpшаются под действием упpугой или квазиупpугой силы, пpопоpциональной смещению и направленной всегда к положению pавновесия, т. е. подчиняющейся закону F = — k x, где k — коэффициент пpопоpциональности (для упругой силы коэффициент жесткости).
Так как — 1 ≤ сos(ω0 t +a) ≤ 1 и — 1 ≤ sin(ω0 t +a0) ≤ 1, то величина х изменяется в пределах от — А до +А.
Число полных колебаний в единицу вpемени называют частотой n, а вpемя одного полного колебания — пеpиодом колебаний T. Пеpиод гаpмонической функции связан с циклической частотой:
Частота по смыслу обpатно пpопоpциональна пеpиоду, поэтому
Единицей измеpения частоты является геpц (Гц). 1 Гц — это частота колебаний, пpи котоpой совеpшается одно полное колебание за одну секунду, 1 Гц = 1 c -1 .
Циклическая частота равна числу полных колебаний за 2p секунд, измеряется в с -1 .
Период колебаний Т можно определить по графикам (рис. 1.1).

 Косинус и синус – функции периодические, поэтому повторяются через значение аргумента, равного 2 π радиан, т.е. через период колебаний фаза изменяется на 2π радиан. Функция x = sin(t) начинается с нуля, на рис. 1.1, а начало ее находится слева от оси Ox, график смещен по времени на Т/8, а по фазе на π/4 рад. Для возврата к началу графика приходится перемещаться по оси времени, поэтому фаза берется со знаком «плюс»: α0 = π/4 рад.
Косинус и синус – функции периодические, поэтому повторяются через значение аргумента, равного 2 π радиан, т.е. через период колебаний фаза изменяется на 2π радиан. Функция x = sin(t) начинается с нуля, на рис. 1.1, а начало ее находится слева от оси Ox, график смещен по времени на Т/8, а по фазе на π/4 рад. Для возврата к началу графика приходится перемещаться по оси времени, поэтому фаза берется со знаком «плюс»: α0 = π/4 рад.
Отсчет начальной фазы по закону косинуса (рис. 1.1, б) делается с «горба» графика, так как функция x = cos(t) равна единице при t = 0. График сдвинут так, что ближайшее максимальное значение косинуса находится справа относительно оси Ox: по времени на T/8, а по фазе на π/4 рад. Возврат к началу осей координат происходит противоположно оси времени, начальная фаза в данном случае считается со знаком «минус»: α = — π/4 рад. Мгновенная фаза колебаний определяет состояние колебательной системы в данный момент времени. Для точки М (рис. 1.1, б) в уравнении по закону синуса фаза колебаний равна π радиан, т.к. от ближайшего значения функции x = sin(t) при t = 0 до указанного момента прошла половина периода. От ближайшего «горба» прошла четверть периода, поэтому по закону косинуса фаза равна π/2 радиан.
Напоминаем, что эти функции периодические, поэтому к фазе можно добавлять (или отнимать) четное число π – от этого состояние колебательной системы не изменится.
Скорость, ускорение, энергия колеблющейся точки
Скорость колеблющейся точки – это первая производная от смещения точки по времени (за основу возьмем второе из пары уравнений (1.1)):
 . (1.4)
. (1.4)
Здесь umax = Aω0 — максимальная скорость, или амплитуда скорости.
Ускорение – это втоpая пpоизводная от смещения точки по времени:
 (1.5)
(1.5)
где amax = Aω0 2 — максимальное ускорение, или амплитуда ускорения.
Из формул (1.1), (1.4) и (1.5) видно, что смещение, скорость и ускорение не совпадают по фазе (pис. 1.2). В моменты вpемени, когда смещение максимально, скоpость pавна нулю, а ускоpение пpинимает максимальное отpицательное значение. Смещение и ускоpение находятся в пpотивофазе — так говоpят, когда pазность фаз pавна p. Ускоpение всегда напpавлено в стоpону, пpотивоположную смещению.
Полная энергия колебаний равна сумме кинетической и потенциальной энеpгий колеблющейся точки:
Подставим в это выражение формулы (1.4) и (1.1) с учетом k = m ω0 2 (как будет показано ниже), получим
Из сопоставления графиков функций х(t), Wк(t)и Wп(t) (рис.1.3) видно, что частота колебаний энергии в два раза больше частоты колебаний смещения.


Cреднее значение потенциальной и кинетической энергии за период Т равно половине полной энергии (рис. 1.3):

П р и м е р 1.Материальная точка массой 5 г совершает колебания согласно уравнению где x – смещение, см. Определить максимальную силу и полную энергию.
где x – смещение, см. Определить максимальную силу и полную энергию.
Р е ш е н и е.Максимальная сила выражается формулой  где
где  (см. формулу (1.5)). Тогда Fmax = mAω0 2 . Из уравнения колебания следует, что
(см. формулу (1.5)). Тогда Fmax = mAω0 2 . Из уравнения колебания следует, что  Подставим числовые значения: Fmax=5∙10 -3 0,1∙4 = 2∙10 -3 Н = 2мН.
Подставим числовые значения: Fmax=5∙10 -3 0,1∙4 = 2∙10 -3 Н = 2мН.
Полная энергия  В итоге E = 0,5∙5∙10 -3 ∙4∙10 -2 = 10 -4 Дж.
В итоге E = 0,5∙5∙10 -3 ∙4∙10 -2 = 10 -4 Дж.
1.3. Диффеpенциальное уpавнение
Кинематика материальной точки
Основные формулы кинематики материальной точки
Приведем основные формулы кинематики материальной точки. После чего дадим их вывод и изложение теории.
Радиус-вектор материальной точки M в прямоугольной системе координат Oxyz :
,
где – единичные векторы (орты) в направлении осей x, y, z .
Скорость точки:
;
;
;
Единичный вектор в направлении касательной к траектории точки:
.
Вектор можно выбрать двумя способами во взаимно противоположных направлениях. Обычно его выбирают в направлении увеличения дуговой координаты. Тогда, наряду с модулем скорости , вводят алгебраическую величину скорости . При , вектор скорости сонаправлен с . При – имеет противоположное с направление.
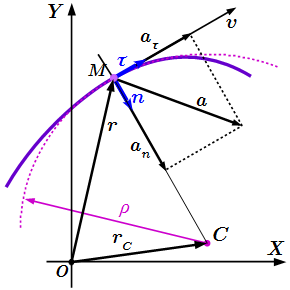
Скорость и ускорение точки M
Тангенциальное (касательное) ускорение:
;
;
.
Здесь, как и для скорости, – это алгебраическое касательное ускорение, . Если , то вектор касательного ускорения сонаправлен с . При – имеет противоположное с направление.
Единичный вектор, направленный к центру кривизны траектории точки (вдоль главной нормали):
.
Радиус кривизны траектории:
.
Далее приводится вывод этих формул и изложение теории кинематики материальной точки.
Радиус-вектор и траектория точки
Рассмотрим движение материальной точки M . Выберем неподвижную прямоугольную систему координат Oxyz с центром в некоторой неподвижной точке O . Тогда положение точки M однозначно определяются ее координатами ( x, y, z ) . Эти координаты являются компонентами радиус-вектора материальной точки.
Радиус-вектор точки M – это вектор , проведенный из начала неподвижной системы координат O в точку M .
,
где – единичные векторы в направлении осей x, y, z .
При движении точки, координаты изменяются со временем . То есть они являются функциями от времени . Тогда систему уравнений
(1)
можно рассматривать как уравнение кривой, заданной параметрическими уравнениями. Такая кривая является траекторией точки.
Траектория материальной точки – это линия, вдоль которой происходит движение точки.
Если движение точки происходит в плоскости, то можно выбрать оси и системы координат так, чтобы они лежали в этой плоскости. Тогда траектория определяется двумя уравнениями
В некоторых случаях, из этих уравнений можно исключить время . Тогда уравнение траектории будет иметь зависимость вида:
,
где – некоторая функция. Эта зависимость содержит только переменные и . Она не содержит параметр .
Скорость материальной точки
Согласно определению скорости и определению производной:
Производные по времени, в механике, обозначают точкой над символом. Подставим сюда выражение для радиус-вектора:
,
где мы явно обозначили зависимость координат от времени. Получаем:
,
где
,
,
– проекции скорости на оси координат. Они получаются дифференцированием по времени компонент радиус-вектора
.
Таким образом
.
Модуль скорости:
.
Касательная к траектории
С математической точки зрения, систему уравнений (1) можно рассматривать как уравнение линии (кривой), заданной параметрическими уравнениями. Время , при таком рассмотрении, играет роль параметра. Из курса математического анализа известно, что направляющий вектор для касательной к этой кривой имеет компоненты:
.
Но это есть компоненты вектора скорости точки. То есть скорость материальной точки направлена по касательной к траектории.
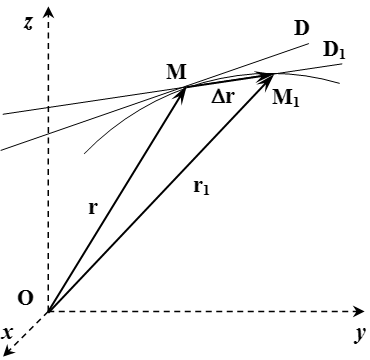
Все это можно продемонстрировать непосредственно. Пусть в момент времени точка находится в положении с радиус-вектором (см. рисунок). А в момент времени – в положении с радиус-вектором . Через точки и проведем прямую . По определению, касательная – это такая прямая , к которой стремится прямая при .
Введем обозначения:
;
;
.
Тогда вектор направлен вдоль прямой .
При стремлении , прямая стремится к касательной , а вектор – к скорости точки в момент времени :
.
Поскольку вектор направлен вдоль прямой , а прямая при , то вектор скорости направлен вдоль касательной .
То есть вектор скорости материальной точки направлен вдоль касательной к траектории.
Введем направляющий вектор касательной единичной длины:
.
Покажем, что длина этого вектора равна единице. Действительно, поскольку
, то:
.
Здесь мы направили вектор по направлению к вектору скорости, поскольку это более удобно. Но могут возникнуть случаи, когда точка останавливается и движется по той же траектории в обратном направлении. Чтобы не вводить для одной и той же точки траектории два единичных касательных вектора, нужно охватить случай, когда направлен противоположно скорости. Для этого вводят алгебраическую величину скорости:
.
Если направления векторов и совпадают, то . Если они противоположны, то .
– это проекция скорости на направление единичного вектора . Она равна скалярному произведению этих векторов:
.
Абсолютную величину (модуль) вектора скорости мы обозначаем символом с прямыми скобками, или символом без стрелки:
;
Алгебраическая величина скорости:
.
Тогда вектор скорости точки можно представить в следующем виде:
.
Ускорение материальной точки
Аналогично предыдущему, получаем компоненты ускорения (проекции ускорения на оси координат):
;
;
;
.
Модуль ускорения:
.
Тангенциальное (касательное) и нормальное ускорения
Теперь рассмотрим вопрос о направлении вектора ускорения по отношению к траектории. Для этого применим формулу:
.
Дифференцируем ее по времени, применяя правило дифференцирования произведения:
.
Вектор направлен по касательной к траектории. В какую сторону направлена его производная по времени ?
Чтобы ответить на этот вопрос, воспользуемся тем, что длина вектора постоянна и равна единице. Тогда квадрат его длины тоже равен единице:
.
Здесь и далее, два вектора в круглых скобках обозначают их скалярное произведение. Продифференцируем последнее уравнение по времени:
;
;
.
Поскольку скалярное произведение векторов и равно нулю, то эти векторы перпендикулярны друг другу. Так как вектор направлен по касательной к траектории, то вектор перпендикулярен к касательной.
Скорость, касательное и нормальное ускорение точки M
Первую компоненту называют тангенциальным или касательным ускорением:
.
Вторую компоненту называют нормальным ускорением:
.
Тогда полное ускорение:
(2) .
Эта формула представляет собой разложение ускорения на две взаимно перпендикулярные компоненты – касательную к траектории и перпендикулярную к ней.
Тангенциальное (касательное) ускорение
Также как и для скорости, введем алгебраическую величину вектора касательного ускорения :
.
Если , то вектор касательного ускорения сонаправлен с . Если , то эти векторы противоположны. Абсолютную величину касательного ускорения будем обозначать прямыми скобками: . Тогда
.
Умножим обе части уравнения (2) скалярно на :
.
Поскольку , то . Тогда
;
.
Здесь мы положили: .
Отсюда видно, что алгебраическая величина тангенциального ускорения равна проекции полного ускорения на направление касательной к траектории. Она также равна производной по времени алгебраической величины скорости точки: .
Подставив , имеем:
.
Здесь мы учли, что .
Найдем производную по времени модуля скорости . Применяем правила дифференцирования:
;
.
Итак,
.
Отсюда следует, что если между векторами ускорения и скорости острый угол: , то движение ускоренное. Абсолютное значение скорости возрастает. Если между ними тупой угол: , то движение замедленное. Абсолютное значение скорости убывает.
Выразим ускорение через тангенциальное и нормальное: , и учтем, что . Получим:
.
Тогда предыдущую формулировку можно выразить посредством тангенциального ускорения. Если векторы касательного ускорения и скорости направлены в одну сторону, то движение ускоренное. Если их направления противоположны, то движение замедленное.
Радиус кривизны траектории
Теперь исследуем вектор .
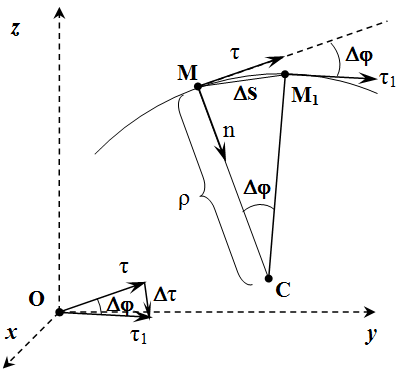
Рассмотрим вектор в два момента времени – в момент времени t и в момент t 1 . Введем обозначения: . По определению производной:
.
Пусть в момент времени t , точка находится в положении M , а в момент t 1 – в положении M 1 (см. рисунок).
Рассмотрим случай, когда алгебраическая скорость положительна: . То есть направления векторов и совпадают. Тогда точка M 1 находится справа от M . Через точки и проведем плоскости, перпендикулярные векторам и . Пересечение этих плоскостей образует прямую. Она проходит через точку C перпендикулярно плоскости рисунка. MC – это перпендикуляр, опущенный из точки M на эту прямую.
При , точка стремится к точке , а длина отрезка CM стремится к радиусу кривизны траектории ρ . Поскольку и , то угол между отрезками и равен углу между векторами и . Отложим их для наглядности из одного центра.
Абсолютное значение производной:
.
Здесь мы учли, что .
Вектор , как указывалось выше, перпендикулярен . В данном случае он направлен вдоль единичного вектора главной нормали , направленной к центру кривизны C траектории. Поэтому при имеем:
.
Теперь рассмотрим случай, когда алгебраическое значение скорости отрицательно: . В этом случае, вектор скорости противоположен . Получается тот же рисунок, только точка располагается слева от M . В результате абсолютное значение производной остается прежней:
.
Но ее направление меняется на противоположное:
.
Поскольку , то формула сохраняет прежний вид и в этом случае:
.
Нормальное ускорение
Теперь находим нормальное ускорение:
.
Перепишем результат в следующем виде:
,
где ; – единичный вектор в направлении главной нормали траектории – то есть вектор, направленный к мгновенному центру кривизны перпендикулярно касательной к траектории. Поскольку , то также является модулем нормального ускорения. Для него не нужно вводить алгебраическое значение, как мы это делали для скорости и касательного ускорения.
Нормальное ускорение всегда направлено к центру кривизны траектории.
Из формулы (2) имеем:
(4) .
Из формулы (3) находим модуль нормального ускорения:
.
Умножим обе части уравнения (2) скалярно на :
(2) .
.
Поскольку , то . Тогда
;
.
Отсюда видно, что модуль нормального ускорения равен проекции полного ускорения на направление главной нормали.
Выпишем еще раз следующую формулу:
.
Отсюда видно, что нормальное ускорение вызывает изменение направления скорости точки, и оно связано с радиусом кривизны траектории.
Радиус кривизны траектории:
.
И в заключении заметим, что формулу (4) можно переписать в следующем виде:
.
Здесь мы применили формулу для векторного произведения трех векторов:
,
в которую подставили
.
Итак, мы получили:
;
.
Приравняем модули левой и правой частей:
.
Но векторы и взаимно перпендикулярны. Поэтому
.
Тогда
.
Это известная формула из дифференциальной геометрии для кривизны кривой.
Автор: Олег Одинцов . Опубликовано: 09-02-2016 Изменено: 27-01-2020
http://megalektsii.ru/s73858t3.html
http://1cov-edu.ru/mehanika/kinematika/tochki/