Статическая определимость кинематической цепи
При силовом анализе механизмов (определении неизвестных сил, действующих на движущиеся звенья) можно использовать уравнения (законы) статики. Докажем это положение, проанализировав реакции в кинематических парах (табл.).
| Кинематические пары | Равновесие каждого звена | Известные параметры | Неизвестные параметры |
5-й класс 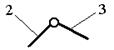 Вращательная Вращательная | 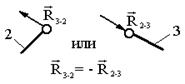 | Точка приложения | Величина, направление |
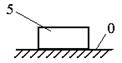 Поступательная Поступательная | 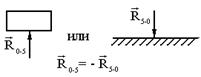 | Направление | Величина, точка приложения |
4-й класс 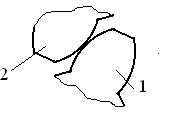 | 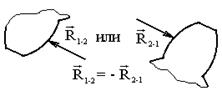 | Точка приложения, направление | Величина |
Примечание. 2, 3, 5 – номера звеньев.
В кинематических парах 5-го класса известно по одному параметру сил реакций, неизвестны два, в кинематических парах 4-го класса известны два параметра, а неизвестен один.
Таким образом, плоская кинематическая цепь, состоящая из кинематических пар 5-го и 4-го классов, имеет 2Р5 + Р4 неизвестных величин сил реакций.
В то же время для одного звена можно составить 3 уравнения статики, а для nзвеньев – 3n уравнений статики.
Кинематическая цепь будет статически определима, если число неизвестных величин сил реакций не превышает числа возможных уравнений статики, т.е.
Это и есть условие статической определимости кинематической цепи.
Полученное равенство можно записать в виде
Но запись слева от знака равенства является числом степеней свободы кинематической цепи W, т.е.
Как известно (см. раздел 1 «Структура и классификация механизмов»), таким свойством (W=0) обладают структурные группы, или группы Асура – статически определимые кинематические цепи.
Метод силового анализа, приведенный ниже, называется кинетостатическим, так как для определения сил реакций в кинематических парах, возникающих при движении звеньев, используются уравнения статики.
Порядок (последовательность) силового анализа рычажного механизма:
1. Выделяем из механизма последнюю (крайнюю, наиболее удаленную от ведущего звена) структурную группу и проводим её силовой расчёт, используя уравнения статики.
2. Выделяем из механизма следующую структурную группу и проводим её силовой расчёт.
3. Силовой расчёт заканчиваем силовым расчётом ведущего звена.
Задан шестизвенный рычажный механизм (рис. 3.4), состоящий из начального механизма (звенья 0 и 1) и структурных групп, образованных звеньями 2 и 3 (двухповодковая структурная группа 2-го класса, 1-го вида) и 4, 5 (структурная группа 2-го класса, 2-го вида).
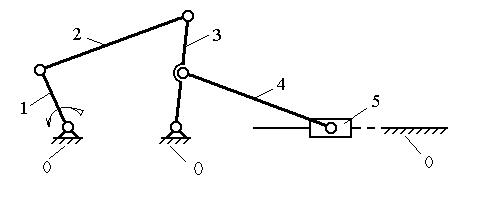
Рис. 3.4. Шестизвенный рычажный механизм
1. Проводим силовой расчёт структурной группы 4-5 (определяем неизвестные реакции, если известны внешние силы, действующие на звенья 4 и 5):
2. Проводим силовой расчёт структурной группы 2-3:
Статическая определимость кинематической цепи
СИЛОВОЙ АНАЛИЗ МЕХАНИЗМОВ
Общие сведения и определения. Силы, действующие в механизмах
При проведении силового анализа решаются основные задачи:
1. Определение реакций в кинематических парах механизмов, находящихся под действием заданных внешних сил. Эти реакции затем используются для расчёта звеньев и элементов кинематических пар (например, подшипников) на прочность, жёсткость, долговечность и т.д.
2. Определение уравновешивающей силы  или уравновешивающего момента
или уравновешивающего момента  , приложенных к ведущему звену. Они уравновешивают внешние силы, приложенные к механизму. Эти величины нужны, например, для выбора двигателя, приводящего в движение данный механизм.
, приложенных к ведущему звену. Они уравновешивают внешние силы, приложенные к механизму. Эти величины нужны, например, для выбора двигателя, приводящего в движение данный механизм.
Силы, действующие в механизмах
Различают две группы сил.
Движущие силы Рдв или моменты движущих сил Мдв, которые:
– совершают положительную работу;
– направлены в сторону скорости точки приложения силы или под острым углом к ней;
– задаются посредством механической характеристики двигателя.
Силы сопротивления РС и их моменты МС, которые:
– совершают отрицательную работу;
– направлены противоположно скорости.
В свою очередь силы сопротивления делятся на силы:
– полезного сопротивления Рп.с и моменты Мп.с;
– вредного сопротивления: трение в кинематических парах, сопротивление среды, внутреннее сопротивление (например, силы упругости звеньев).
Кроме этого существуют:
– силы веса  , где r – плотность материала; V – объём звена детали;
, где r – плотность материала; V – объём звена детали;
– силы инерции  ;
;
– моменты сил инерции  , где mu, JS – масса и массовый момент инерции звена;
, где mu, JS – масса и массовый момент инерции звена;  и
и  – линейное и угловое ускорения;
– линейное и угловое ускорения;
– силы реакций в кинематических парах  .
.
Силы инерции звеньев и моменты сил инерции
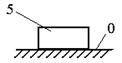
Из теоретической механики известно, что все силы инерции звена, совершающего плоскопараллельное движение и имеющего плоскость симметрии, параллельную плоскости движения, могут быть сведены к силе инерции  , приложенной в центре масс S звена, и паре сил инерции, момент которых обозначим
, приложенной в центре масс S звена, и паре сил инерции, момент которых обозначим  (рис. 3.1).
(рис. 3.1).

 – главный вектор сил инерции, или сила инерции;
– главный вектор сил инерции, или сила инерции;  – главный момент сил инерции, или момент сил инерции; m – масса звена;
– главный момент сил инерции, или момент сил инерции; m – масса звена;
Рис. 3.1. Сила инерции JS – массовый момент инерции относительно
звена и момента центра масс;  – ускорение центра масс;
– ускорение центра масс;
сил инерции  – угловое ускорение звена.
– угловое ускорение звена.
 и
и  направлены в стороны, противоположные ускорениям и
направлены в стороны, противоположные ускорениям и  .
.
Для дальнейших расчётов удобно заменить  и
и  одной силой, использовав для этого 3 метода.
одной силой, использовав для этого 3 метода.
Метод замещающих точек подробно представлен в [3. С. 252].
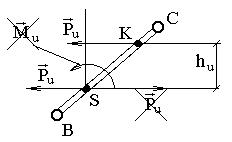 Перенос силы
Перенос силы  на плечо
на плечо  : момент сил инерции заменяется парой сил с плечом hu (рис. 3.2), причём одна сила приложена к центру масс звена S и направлена противоположно преобразуемой силе , а другая смещена на плечо hu и приложена к точке К – центру качания звена.
: момент сил инерции заменяется парой сил с плечом hu (рис. 3.2), причём одна сила приложена к центру масс звена S и направлена противоположно преобразуемой силе , а другая смещена на плечо hu и приложена к точке К – центру качания звена.
Рис. 3.2. Перенос силы на плечо
при замене силы и момента одной силой
Определение центра качания звена через мгновенный центр ускорений (МЦУ).
При этом сила инерции переносится параллельно самой себе на расстояние  (рис. 3.3), вычисленное по формуле
(рис. 3.3), вычисленное по формуле
 , мм,
, мм,
где  – мгновенный центр ускорений звена;
– мгновенный центр ускорений звена;  откладывается в сторону, являющуюся продолжением отрезка
откладывается в сторону, являющуюся продолжением отрезка  .
.
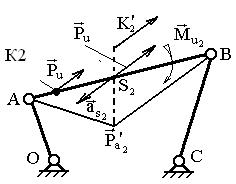
Рис. 3.3. Определение центра качания звена
Статическая определимость кинематической цепи
При силовом анализе механизмов (определении неизвестных сил, действующих на движущиеся звенья) можно использовать уравнения (законы) статики. Докажем это положение, проанализировав реакции в кинематических парах (табл.).
| Кинематические пары | Равновесие каждого звена | Известные параметры | Неизвестные параметры |
5-й класс 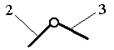 Вращательная Вращательная | 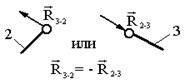 | Точка приложения | Величина, направление |
 Поступательная Поступательная |  | Направление | Величина, точка приложения |
4-й класс 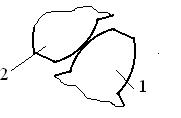 |  | Точка приложения, направление | Величина |
Примечание. 2, 3, 5 – номера звеньев.
В кинематических парах 5-го класса известно по одному параметру сил реакций, неизвестны два, в кинематических парах 4-го класса известны два параметра, а неизвестен один.
Таким образом, плоская кинематическая цепь, состоящая из кинематических пар 5-го и 4-го классов, имеет 2Р5 + Р4 неизвестных величин сил реакций.
В то же время для одного звена можно составить 3 уравнения статики, а для nзвеньев – 3n уравнений статики.
Кинематическая цепь будет статически определима, если число неизвестных величин сил реакций не превышает числа возможных уравнений статики, т.е.
Это и есть условие статической определимости кинематической цепи.
Полученное равенство можно записать в виде
Но запись слева от знака равенства является числом степеней свободы кинематической цепи W, т.е.
Как известно (см. раздел 1 «Структура и классификация механизмов»), таким свойством (W=0) обладают структурные группы, или группы Асура – статически определимые кинематические цепи.
Метод силового анализа, приведенный ниже, называется кинетостатическим, так как для определения сил реакций в кинематических парах, возникающих при движении звеньев, используются уравнения статики.
Порядок (последовательность) силового анализа рычажного механизма:
1. Выделяем из механизма последнюю (крайнюю, наиболее удаленную от ведущего звена) структурную группу и проводим её силовой расчёт, используя уравнения статики.
2. Выделяем из механизма следующую структурную группу и проводим её силовой расчёт.
3. Силовой расчёт заканчиваем силовым расчётом ведущего звена.
Задан шестизвенный рычажный механизм (рис. 3.4), состоящий из начального механизма (звенья 0 и 1) и структурных групп, образованных звеньями 2 и 3 (двухповодковая структурная группа 2-го класса, 1-го вида) и 4, 5 (структурная группа 2-го класса, 2-го вида).

Рис. 3.4. Шестизвенный рычажный механизм
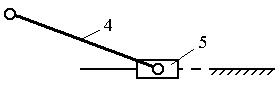
1. Проводим силовой расчёт структурной группы 4-5 (определяем неизвестные реакции, если известны внешние силы, действующие на звенья 4 и 5):

2. Проводим силовой расчёт структурной группы 2-3:
Статические звенья.
Читайте также:
|

 .
.





 ,
, .
. .
.


 , где
, где  .
.

 .
. .
.
 .
.
 .
. ,
, .
. ,
,  .
. ;
;  ,
,  .
. .
.
 .
. .
.
 .
. ,
, ,
, ,
,  .
.
 ,
, ,
,  .
.


 .
.