УРАВНЕНИЯ ДИНАМИКИ И СТАТИКИ
Динамика рассматривает состояние движения, ход развития процессов во времени. Динамика процессов обычно описывается дифференциальными или разностными уравнениями.
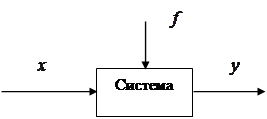
Будем рассматривать систему
 |
Поведение исследуемой системы описывается дифференциальными уравнениями. Так зависимость выходного сигнала  от входного
от входного  в общем случае можно описать следующим дифференциальным уравнением
в общем случае можно описать следующим дифференциальным уравнением

 .
. 
 .
.  , (2.1)
, (2.1)
 ,
,  ,
,  , … ,
, … ,  ,
,
— начальные условия. Уравнение 2.1. является уравнением динамики рассматриваемой системы.
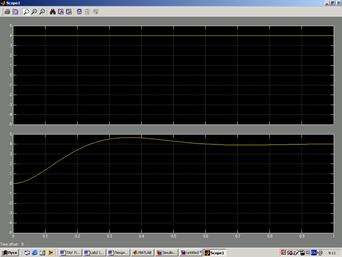
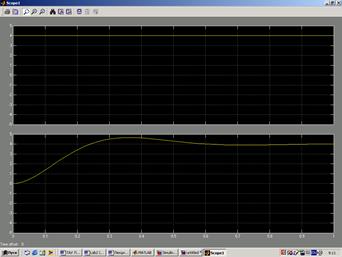
Пусть поведение системы Рис.2.1 описывается уравнением
 .
.
Будем предполагать, что  . Входной сигнал
. Входной сигнал  и сигнал на выходе системы
и сигнал на выходе системы  , полученный в результате моделирования при нулевых начальных условиях, изображены на Рис.2.2.
, полученный в результате моделирования при нулевых начальных условиях, изображены на Рис.2.2.
В отличии от динамики, рассматривающей процессы протекающие в системе
во времени, статика изучает состояние покоя или равновесия. В этом случае
отсутствует временной фактор.
Из уравнения динамики (2.1), приравняв нулю все производные (так как режим установившейся), нетрудно получить уравнение статики системы
 , (2.2)
, (2.2)
где  — постоянная входная величина,
— постоянная входная величина,  — установившееся значение выходной величины.
— установившееся значение выходной величины.
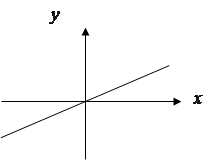
Из уравнения статики можно получить статическую характеристику системы, представляющую собой зависимость выходной величины от входной в статическом режиме
 .
.
Представим статическую характеристику в виде графика Рис.2.3.
Статическая характеристика может быть получена экспериментально путем подачи на вход системы постоянных воздействий и измерения установившихся значений выходных величин.
Дата добавления: 2019-12-09 ; просмотров: 400 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Уравнения динамики и статики
При проектировании и исследовании САУ необходимо знать уравнения, описывающие их движения. Процессы в САУ описываются дифференциальными, разностными, интегральными и интегро-дифференциальными уравнениями, которые называют ее математической моделью. При исследовании САУ на различных этапах математическая модель может быть различной. Начинают исследования САУ с простейшей математической моделью, а затем ее усложняют, учитывая дополнительные связи и влияния. Такой подход объясняется тем, что к математической модели предъявляются противоречивые требования. Математическая модель должна достаточно полно описывать динамику САУ и при этом быть по возможности простой.
В дальнейшем будут рассматриваться только обыкновенные дифференциальные уравнения, в неявной форме которые могут быть записаны
 , (3.1)
, (3.1)
 , где (3.2)
, где (3.2)
| x, x ( i ) | — управляемая (выходная) величина и ее производные  ; ; |
| g, g ( j ) | — задающая (входная) величина и ее производные  ; ; |
| ai и bj | — постоянные коэффициенты, зависящие от параметров системы; |
| с и m | — числа, определяющие порядок производных  , причем n определяет порядок дифференциального уравнения; , причем n определяет порядок дифференциального уравнения; |
| t | — независимая переменная (время). |
Уравнения (3.1) и (3.2) могут быть записаны в явной форме, разрешенные относительно старшей производной (например, (3.2))
 .
.
Данное дифференциальное уравнение в явной форме n-го порядка можно преобразовать в систему n дифференциальных уравнений первого порядка:
путем введения новых неизвестных

Если в дифференциальное уравнение (3.2) входит n неизвестных функций  , тогда можно записать систему из n уравнений первого порядка в виде
, тогда можно записать систему из n уравнений первого порядка в виде
 ,
,
где  – переменные, характеризующие состояние системы.
– переменные, характеризующие состояние системы.
В векторной форме дифференциальное уравнение будет иметь вид

 ,
,
| где | X – вектор выходных величин (параметров состояний); |
| G – вектор задающих (входных) величин; | |
| A – матрица объекта управления с элементами aij; | |
| B – матрица задающих величин с элементами bij . |
Широкое применение в ТАУ получила операторная форма записи дифференциального уравнения. Это объясняется тем, что от дифференциального уравнения посредством интегрального преобразования (например, преобразования Лапласа) переходят к операторной форме. Операторное уравнение является алгебраическим и его решение проще, чем дифференциальное. Затем из полученного решения операторного уравнения с помощью обратного преобразования получают решение дифференциального уравнения.
Дифференциальное уравнение (3.1) при нулевых начальных условиях

в операторной форме можно записать

 ,
,
где  — преобразование Лапласа от
— преобразование Лапласа от  ;
;
 — преобразование Лапласа от
— преобразование Лапласа от  ;
;
 — характеристический многочлен (3.1);
— характеристический многочлен (3.1);
 — изображение правой части (3.1);
— изображение правой части (3.1);
 — параметр преобразования Лапласа.
— параметр преобразования Лапласа.
Операторная форма записи дифференциального уравнения, когда начальные условия по всем переменным равны нулю, совпадает с символической формой, когда  , а p – символ дифференцирования. Поэтому для получения операторной формы записи дифференциального уравнения, когда начальные условия нулевые, применяют приемы символической формы.
, а p – символ дифференцирования. Поэтому для получения операторной формы записи дифференциального уравнения, когда начальные условия нулевые, применяют приемы символической формы.
Уравнение движения САУ в любой форме полностью описывает весь процесс управления, т.е. процесс изменения управляемых величин как в переходном, так и в установившемся режимах.
Под установившимся режимом понимают процесс, при котором регулируемая (управляемая) величина изменяется по закону, определяемому лишь законом изменения задающего воздействия. Установившейся режим САУ, относительно которого рассматривается движение системы в процессе управления, называется исходным.
Переходным режимом называется изменение управляемой величины при переходе САУ из одного в другое установившееся состояние.
Если в установившемся режиме воздействия после их приложения больше не изменяют своих величин во времени, то в САУ устанавливается так называемый статический режим.
Уравнение статики может быть получено из уравнения движения САУ (3.1), если все члены, содержащие производные, приравнять нулю, то есть
 или
или  ,
,
где  — коэффициент передачи САУ.
— коэффициент передачи САУ.
Графическое отображение данной зависимости, т.е. зависимости между выходной x и входной g величинами САУ в статическом режиме, называется статической характеристикой (рис. 3.1).
 |
Рис.3.1. Статические характеристики элементов САУ
Статические характеристики элементов САУ и систем в целом могут быть как линейными (кривая 1, рис. 3.1), так и нелинейными (кривая 2, рис. 3.1). Если характеристика нелинейная, то необходимо учитывать влияние данной нелинейности на динамику САУ.
Дата добавления: 2015-12-11 ; просмотров: 1349 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
УРАВНЕНИЯ ДИНАМИКИ И СТАТИКИ
Динамика рассматривает состояние движения, ход развития процессов во времени. Динамика процессов обычно описывается дифференциальными или разностными уравнениями.
Будем рассматривать систему
 |
Поведение исследуемой системы описывается дифференциальными уравнениями. Так зависимость выходного сигнала  от входного
от входного  в общем случае можно описать следующим дифференциальным уравнением
в общем случае можно описать следующим дифференциальным уравнением

 .
. 
 .
.  , (2.1)
, (2.1)
 ,
,  ,
,  , … ,
, … ,  ,
,
— начальные условия. Уравнение 2.1. является уравнением динамики рассматриваемой системы.
Пусть поведение системы Рис.2.1 описывается уравнением
 .
.
Будем предполагать, что  . Входной сигнал
. Входной сигнал  и сигнал на выходе системы
и сигнал на выходе системы  , полученный в результате моделирования при нулевых начальных условиях, изображены на Рис.2.2.
, полученный в результате моделирования при нулевых начальных условиях, изображены на Рис.2.2.
В отличии от динамики, рассматривающей процессы протекающие в системе
во времени, статика изучает состояние покоя или равновесия. В этом случае
отсутствует временной фактор.
Из уравнения динамики (2.1), приравняв нулю все производные (так как режим установившейся), нетрудно получить уравнение статики системы
 , (2.2)
, (2.2)
где  — постоянная входная величина,
— постоянная входная величина,  — установившееся значение выходной величины.
— установившееся значение выходной величины.
Из уравнения статики можно получить статическую характеристику системы, представляющую собой зависимость выходной величины от входной в статическом режиме
 .
.
Представим статическую характеристику в виде графика Рис.2.3.
Статическая характеристика может быть получена экспериментально путем подачи на вход системы постоянных воздействий и измерения установившихся значений выходных величин.
2.2. ЛИНЕАРИЗАЦИЯ УРАВНЕНИЙ
|
Пусть система

описывается следующим дифференциальным уравнением
 , (2.3)
, (2.3)
где  и
и  — соответственно входной и выходной сигналы,
— соответственно входной и выходной сигналы,  — возмущающее воздействие.
— возмущающее воздействие.
Уравнение (2.3) является нелинейным. Процесс исследования нелинейных систем существенно сложнее процесса исследования линейных. Поэтому исследование нелинейных систем стремятся свести к исследованию линейных. Процедура преобразования нелинейных уравнений в линейные называется линеаризацией.
Процедура линеаризации базируется на разложении нелинейных функций, входящих в уравнения, в ряд Тейлора. Необходимо отметить, что разложение какой либо функции в ряд Тейлора происходит в достаточно малых окрестностях некоторой точки. В качестве такой точки берется точка, соответствующая заданному режиму работы системы. В установившемся состоянии это может быть режим равновесия. Заметим, что отклонения реальных значений входных и выходных сигналов от их заданных значений в нормально работающей замкнутой автоматической системе не велико. Система работает по принципу парирования таких отклонений.
Обозначим переменные, соответствующие заданному режиму работы системы
 . (2.4)
. (2.4)
Введем отклонения реальных значений сигналов от требуемых
 ,
,  ,
,  .
.
Тогда
 ,
,  ,
,  ,
,  ,
,  ,
,  .
.
Рассматривая функцию  выражения (2.3) как функцию независимых переменных
выражения (2.3) как функцию независимых переменных  , разложим ее в ряд Тейлора в точке (2.4), соответствующей заданному режиму
, разложим ее в ряд Тейлора в точке (2.4), соответствующей заданному режиму
 +
+  +
+  +
+  +
+
+  +
+  + +
+ +  +
+
+  +
+  + +
+ +  +
+
 +
+  + +
+ +  +
+
+  +
+  + +
+ +  +
+  =0.
=0.
В этом выражении оставим только первые члены разложения, отбросив малые члены более высокого порядка.
+  +
+  +
+
 +
+  +
+  =0. (2.5)
=0. (2.5)
В заданном режиме уравнение (2.3) примет вид
 .
.
Вычтем это уравнение из (2.5), получим
 + + +
+ + +  =0. (2.6)
=0. (2.6)
Введем обозначения
 ,
,  ,
,  ,
,  ,
,  .
.
Подставив их в (2.6) и отбросив знак  , получим линеаризованное уравнение в отклонениях
, получим линеаризованное уравнение в отклонениях
 . (2.7)
. (2.7)
Линеаризация уравнения (2.3) была проведена в предположениях:
— отклонения входных  и
и  сигналов от их заданных значений малы,
сигналов от их заданных значений малы,
— функция имеет непрерывные частные производные по всем своим аргументам в окрестности точки разложения, соответствующей заданному режиму,
— линеаризованное уравнение (2.7) является уравнением в отклонениях.
|
Рассмотрим Рис.2.5.
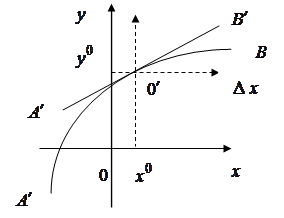 |
В этом случае нелинейная зависимость между и , выраженная
кривой  , в окрестностях точки разложения
, в окрестностях точки разложения  , заменена касательной
, заменена касательной  . Запись же уравнения в отклонениях, соответствует переносу начала координат в точку .
. Запись же уравнения в отклонениях, соответствует переносу начала координат в точку .
2.3. ПРЕОБРАЗОВАНИЕ ЛАПЛАСА И ЕГО ОСНОВНЫЕ
СВОЙСТВА
Преобразованием Лапласа называется следующее соотношение
 , (2.8)
, (2.8)
где  — функция вещественного переменного,
— функция вещественного переменного,  — функция комплексного переменного
— функция комплексного переменного  . Преобразование Лапласа ставит в соответствие функции действительного переменного функцию комплексного переменного
. Преобразование Лапласа ставит в соответствие функции действительного переменного функцию комплексного переменного  . Смысл преобразования Лапласа заключается в том, что оно переводит рассмотрение процесса, являющегося функцией действительного переменного, например времени, на комплексную плоскость с координатами
. Смысл преобразования Лапласа заключается в том, что оно переводит рассмотрение процесса, являющегося функцией действительного переменного, например времени, на комплексную плоскость с координатами  и
и  .
.
Функцию называют оригиналом, а функцию изображением по Лапласу или просто изображением. Преобразование Лапласа можно записать в символическом виде
 (2.9)
(2.9)
где  — оператор Лапласа.
— оператор Лапласа.
Функция , являющаяся оригиналом, должна обладать следующими свойствами:
— должна быть определена и кусочно-дифференцируема на всей положительной числовой полуоси  ;
;
—  при
при  ;
;
— существуют такие положительные числа  и
и  , что
, что  при
при  .
.
С помощью обратного преобразования Лапласа
 , (2.10)
, (2.10)
можно найти по известному изображению его оригинал. В нем интеграл берется вдоль любой прямой  . Символически обратное преобразование Лапласа можно записать
. Символически обратное преобразование Лапласа можно записать
 ,
,
где  — обратный оператор Лапласа.
— обратный оператор Лапласа.
Рассмотрим основные свойства преобразования Лапласа.
1. Свойство линейности. Для любых постоянных  и
и 
 .
.
2. Дифференцирование оригинала.
Для первой производной
 , где
, где  .
.
Для n-й производной
 ,
,
 ,
,  .
.
Если начальные условия нулевые
 ,
,
 .
.
Таким образом, n-кратное дифференцирование оригинала при нулевых начальных условиях, соответствует умножению изображению на n-ю степень  .
.
3. Интегрирование оригинала сводится к делению изображения на .
 .
.
4. Теорема запаздывания. Для любого положительного 
 .
.
5. Теорема о свертке. Если  и
и  — оригиналы, а
— оригиналы, а  и
и  — их изображения, то
— их изображения, то
 .
.
Интеграл правой части называется сверткой функций и  , который обозначают *
, который обозначают *
 .
.
6. Теорема о предельных значениях. Если — оригинал, а — его изображение, то
 ,
,
и при существовании предела  ,
,
 .
.
2.4. Запись дифференциальных уравнений в символическом виде.
Будем рассматривать следующую систему

Пусть в общем случае линейная система описывается дифференциальным уравнением n-го порядка

 .
. 

 .
.  ,
,
где  и
и  соответственно входной и выходной сигналы системы. Преобразуем левую и правую части этого уравнения по Лапласу. В результате получим следующее дифференциальное уравнение в символическом виде
соответственно входной и выходной сигналы системы. Преобразуем левую и правую части этого уравнения по Лапласу. В результате получим следующее дифференциальное уравнение в символическом виде

 , (2.11)
, (2.11)
где  — оператор дифференцирования.
— оператор дифференцирования.
 =
=  ,
,
 =
=  .
.
Тогда уравнение (2.11) можно записать в более компактно
 .
.
2.5. C тандартная форма записи линейных дифференциальных
уравнений
Принято, что линейные дифференциальные уравнения не выше второго порядка записываются в стандартной форме, а именно:
— члены уравнения, содержащие выходную величину и ее производные, записываются в левой части уравнения;
— все остальные члены уравнения, записываются справа;
— коэффициент при выходной величине делают равным единице;
— коэффициенты при входных и выходных величинах и их производных являются либо постоянными времени, либо коэффициентами передачи (усиления).
Рассмотрим дифференциальное уравнение в символическом виде
 .
.
Разделим обе части этого уравнения на  и введем обозначения
и введем обозначения
 ,
,  ,
,  ,
,  ,
,  .
.
 .
.
Здесь  ,
,  ,
,  — имеют размерность времени и называются постоянными времени,
— имеют размерность времени и называются постоянными времени,  и
и  — безразмерные коэффициенты передачи (усиления).
— безразмерные коэффициенты передачи (усиления).
2.5. Передаточные функции.
Передаточной функцией системы называется отношение выходного сигнала к входному, преобразованных по Лапласу при нулевых начальных условиях. Тогда передаточная функция рассматриваемой системы (Рис.2.6) равна
 . (2.12)
. (2.12)
 |
Пусть ее поведение описывается следующим дифференциальным уравнением в символической записи
 ,
,
 .
.
Приведем это уравнение к виду
 .
.

 ,
,

 .
.
 — передаточная функция по входному сигналу,
— передаточная функция по входному сигналу,
 — передаточная функция по возмущающему воздействию.
— передаточная функция по возмущающему воздействию.
Если линейная система имеет несколько входов, то при определении передаточной функции по одному из входов, другие входы полагаются равными нулю.
http://helpiks.org/6-18020.html
http://megaobuchalka.ru/15/10022.html