Уравнения возмущенного продольного движения самолета
Курсовая работа: Расчёт закона управления продольным движением самолета
Название: Расчёт закона управления продольным движением самолета Раздел: Рефераты по транспорту Тип: курсовая работа Добавлен 16:15:05 05 декабря 2010 Похожие работы Просмотров: 129 Комментариев: 23 Оценило: 2 человек Средний балл: 5 Оценка: неизвестно Скачать
РАСЧЁТ ЗАКОНА УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЁТА
1. Математическое описание продольного движения самолета
1.1 Общие сведения
1.2 Уравнения продольного движения самолета
1.3 Силы и моменты при продольном движении
1.4 Линеаризованные уравнения движения
1.5 Математическая модель привода стабилизатора
1.6 Математические модели датчиков угловой скорости и перегрузки
1.7 Математическая модель датчика положения штурвала
2. Техническое задание на разработку алгоритма ручного управления продольным движением самолета
2.1 Общие положения
2.2 Требования к статическим характеристикам
2.3 Требования к динамическим характеристикам
2.4 Требования к разбросам параметров
2.5 Дополнительные требования
3. План выполнения курсовой работы
3.1 Этап анализа
3.2 Этап синтеза
4. Рекомендации к выбору желаемых собственных значений
Целью курсовой работы является закрепление материала первой части курса ТАУ [1] и освоение модальной методики расчета алгоритмов управления на примере синтеза закона управления продольным движением самолета. Методические указания содержат вывод математических моделей продольного движения самолета, электрогидравлического привода руля высоты, датчиков положения штурвала, угловой скорости тангажа, перегрузки, а также приводятся числовые данные для гипотетического самолета.
Одним из наиболее ответственных и трудных моментов при реализации методики модального синтеза является выбор желаемых собственных значений. Поэтому приведены рекомендации по их выбору.
1.1Общие сведения
Полет самолета осуществляется под влиянием сил и моментов, действующих на него. Отклоняя органы управления, летчик может регулировать величину и направление сил и моментов, тем самым, изменяя параметры движения самолета в желаемую сторону. Для прямолинейного и равномерного полета необходимо, чтобы все силы и моменты были уравновешены. Так, например, в прямолинейном горизонтальном полете с постоянной скоростью подъемная сила равна силе тяжести самолета, а тяга двигателя – силе лобового сопротивления. При этом обязательно должно соблюдаться и равновесие моментов. В противном случае самолет начинает вращаться.
Равновесие, созданное летчиком, может быть нарушено воздействием какого-либо возмущающего фактора, например, турбулентностью атмосферы или порывами ветра. Поэтому когда режим полета установлен, требуется обеспечить устойчивость движения.
Другой важнейшей характеристикой самолета является управляемость. Под управляемостью самолета понимают его способность реагировать на перемещение рычагов управления (органов управления). О хорошо управляемом самолете летчики говорят, что он хорошо «ходит за ручкой». Это означает, что для выполнения требуемых маневров летчику необходимо совершить простые по характеру отклонения рычагов и прилагать к ним небольшие по величине, но четко ощутимые усилия, на которые самолет отвечает соответствующими изменениями положения в пространстве без излишнего запаздывания. Управляемость – важнейшая характеристика самолета, определяющая возможность полета. На неуправляемом самолете летать невозможно.
Летчику одинаково трудно управлять самолетом, когда требуется прикладывать большие усилия к рычагам управления и выполнять большие перемещения штурвала, а также когда отклонения штурвала и усилия, потребные для их отклонения, слишком малы. В первом случае летчик быстро утомляется при совершении маневров. О таком самолете говорят, что он «тяжел в управлении». Во втором случае самолет реагирует на малое, иногда даже непроизвольное перемещение ручки, требуя от летчика большого внимания, точного и плавного управления. О таком самолете говорят что он «строг в управлении» [2].
На основе летной практики и теоретических исследований установлено, какими должны быть характеристики устойчивости и управляемости, чтобы удовлетворить требованиям удобного и безопасного пилотирования. Один из вариантов формулирования этих требований представлен в техническом задании на курсовую работу.
1.2Уравнения продольного движения самолета
Обычно полёт самолёта рассматривают как движение в пространстве абсолютно жёсткого тела. При составлении уравнений движения используют законы механики, позволяющие в самом общем виде записать уравнения движения центра масс самолёта и его вращательного движения вокруг центра масс.
Исходные уравнения движения вначале записывают в векторной форме
,
,
m – масса самолета;
– равнодействующая всех сил;
– главный момент внешних сил самолёта, вектор суммарного вращающего момента;
– вектор угловой скорости системы координат;
– момент количества движения самолёта;
Знак «» обозначает векторное произведение. Далее переходят к обычной скалярной записи уравнений, проектируя векторные уравнения на некоторую систему координатных осей.
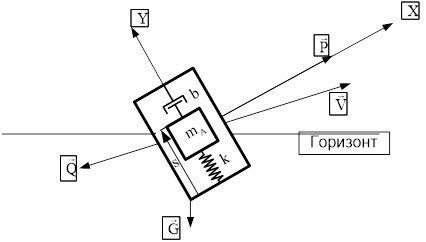
Получаемые общие уравнения оказываются настолько сложными, что, по существу, исключают возможность проведения наглядного анализа. Поэтому в аэродинамике летательных аппаратов вводятся различные упрощающие приёмы и предположения. Очень часто оказывается целесообразным разделить полное движение самолёта на продольное и боковое. Продольным называется движение с нулевым креном, когда вектор силы тяжести и вектор скорости самолёта лежат в его плоскости симметрии. Далее будем рассматривать только продольное движение самолёта (рис. 1).
Это рассмотрение будем вести с использованием связанной ОXYZ и полусвязанной ОXe Ye Ze систем координат. За начало координат обеих систем принимается точка, в которой расположен центр тяжести самолета. Ось ОX связанной системы координат проводится параллельно хорде крыла и называется продольной осью самолета. Нормальная ось ОY перпендикулярна оси ОX и расположена в плоскости симметрии самолета. Ось ОZ перпендикулярна к осям ОX и ОY, а следовательно, и к плоскости симметрии самолета. Она называется поперечной осью самолета. Ось ОXe полусвязанной системы координат лежит в плоскости симметрии самолета и направлена по проекции на неё вектора скорости. Ось ОYe перпендикулярна оси ОXe и расположена в плоскости симметрии самолета. Ось ОZe перпендикулярна к осям ОXe и ОYe .
Остальные обозначения, принятые на рис. 1: – угол атаки, – угол тангажа, – угол наклона траектории, – вектор воздушной скорости, – подъемная сила, – сила тяги двигателей, – сила лобового сопротивления, – сила тяжести, – угол отклонения рулей высоты, – момент тангажа, вращающий самолёт вокруг оси ОZ.
Запишем уравнение продольного движения центра масс самолёта
, (1)
где – суммарный вектор внешних сил. Представим вектор скорости с использованием его модуля V и угла его поворота относительно горизонта:
.
Тогда производная вектора скорости по времени запишется в виде:
. (2)
С учётом этого уравнения продольного движения центра масс самолёта в полусвязанной системе координат (в проекциях на оси ОXe и ОYe ) примут вид:
; (3)
. (4)
Уравнение вращения самолёта вокруг связанной оси OZ имеет вид:
, (5)
где Jz – момент инерции самолета относительно оси OZ, Mz – суммарный вращающий момент относительно оси OZ.
Полученные уравнения полностью описывают продольное движение самолета. В курсовой работе рассматривается только угловое движение самолёта, поэтому далее будем учитывать только уравнения (4) и (5).
В соответствии с рис. 1, имеем:
, (6)
– (7)
угловая скорость вращения самолёта вокруг поперечной оси OZ (угловая скорость тангажа).
При оценке качества управляемости самолета большое значение имеет перегрузка. Она определяется как отношение действующей на самолёт суммарной силы (без учёта веса) к силе веса самолёта. В продольном движении самолёта используют понятие «нормальная перегрузка». По ГОСТ 20058–80 она определяется как отношение проекции главного вектора системы сил, действующих на самолёт, без учёта инерционных и гравитационных сил, на ось OY связанной системы координат к произведению массы самолёта на ускорение свободного падения:
. (8)
Переходные процессы по перегрузке и угловой скорости тангажа определяют оценку летчиком качества управляемости продольного движения самолета.
1.3Силы и моменты при продольном движении
Силы и моменты, действующие на самолёт, – это сложные нелинейные функции, зависящие от режима полёта и положения управляющих органов. Так, подъёмная сила Y и сила лобового сопротивления Q записываются в виде:
; (9)
. (10)
Суммарный момент есть функция скорости V и высоты H полёта, угла атаки и скорости его изменения , угловой скорости изменения угла тангажа (скорости вращения самолёта вокруг связанной поперечной оси OZ) и угла отклонения руля высоты :
. (11)
сx , cy , – задаваемые табличным путём функции,
– плотность атмосферы,
S – сечение Миделя (площадь характерного сечения самолёта).
Эти зависимости определяются специалистами по аэродинамике расчётным путём и уточняются с помощью продувок в аэродинамических трубах и путём натурного эксперимента.
1.4Линеаризованные уравнения движения
Уравнения динамики продольного движения самолета существенно упрощаются при рассмотрении малых отклонений от горизонтального полета самолета с постоянной скоростью. Проведём линеаризацию уравнений углового продольного движения самолёта. Будем полагать, что за время переходных процессов по углам и угловым скоростям тяга двигателей P, модуль скорости V и высота полёта H остаются неизменными. Из выражений (5) и (11) получим:
(12)
Из выражений (3) и (9) получим:
(13)
Момент или сила с верхним индексом означают здесь соответствующую частную производную. Обозначим:
; (14)
Оказывается, что параметры и являются чрезвычайно информативными с точки зрения оценки режима полёта и качества угловых процессов самолёта. Пренебрежём, как это часто делается для маневренных самолётов, слагаемым в правой части уравнения (13). С учётом равенства (6) получим уравнение для производной приращения угла атаки:
(15)
Уравнения (12) и (15) являются линейными дифференциальными уравнениями углового движения самолета в отклонениях.
Рассмотрим подробнее выражение (8) для нормальной перегрузки. При неизменном во времени модуле скорости V можно полагать, что сила тяги P примерно равна силе лобового сопротивления Q. Тогда
(16)
Теперь перейдём к приращениям:
(17)
Тогда, полагая и пренебрегая величиной , с учётом (14) для углов, измеряемых не в радианах, а в градусах, получим:
. (18)
В предыдущих выражениях g – ускорение свободного падения, m – масса самолета. При численных расчетах полагаем м/с 2 .
Из (13) и (14), пренебрегая величиной , получим формулу для приращения ускорения самолёта по оси подъёмной силы:
. (19)
Учитывая (16), получим связь между приращениями нормальной перегрузки и ускорением
. (20)
Таким образом, о величине приращения нормальной перегрузки можно судить по показаниям датчика нормального ускорения (акселерометра).
Примем в качестве переменных состояния приращения угла атаки и угловой скорости тангажа. Заменив в правой части уравнения (12) выражением (15), получим следующие уравнения состояния:
, (21)
, (22)
где угловые величины выражены в градусах, а скорость – м/с.
В таблице приведены числовые данные для коэффициентов линеаризованных уравнений самолета для различных высот и скоростей полета. Вместо воздушной скорости полета V в таблице данных используется относительная скорость
, (23)
где величину M называют числом Маха, – скорость звука на данной высоте.
1.5Математическая модель привода стабилизатора
Схема электрогидравлического привода руля высоты представлена на рис. 2. Привод представляет собой следящую систему, входной величиной которой является электрический управляющий сигнал, а выходной – перемещение рабочего органа, связанного со стабилизатором (рулём высоты).
На сравнивающее устройство 2 подаются управляющий сигнал 1 и сигнал обратной связи 3, полученный с датчика обратной связи 16. Сигнал рассогласования 4 подаётся на вход электромеханического преобразователя 5. Собственно гидравлический усилитель, составляющий основу привода, является двухкаскадным. Питание первого каскада усиления осуществляется через редуктор 6. Заслонка 7, укрытая защитным колпачком 8, жёстко связана с якорем электромеханического преобразователя. При перемещении заслонки изменяются гидравлические сопротивления сопел 9, через которые непрерывно течёт рабочая жидкость под воздействием небольшого управляющего давления Pу . Переменные сопротивления сопел и постоянные гидравлические сопротивления дросселей 10 образуют гидравлический мост, диагональ которого составляет нагрузка – золотник 11. Поэтому при отклонении заслонки от среднего положения в областях А и Б золотника 11 образуется перепад давлений, создающий движущую силу. Пружины 12 выполняют роль жёсткой механической отрицательной обратной связи. Поршни золотника при постоянном положении заслонки 7 будут перемещаться до тех пор, пока сила пружины не уравновесит движущую силу. Таким образом, перемещение штока золотника пропорционально сигналу рассогласования 4. Смещение штока золотника совместно с закреплёнными на нём поршеньками приоткрывает соответствующий канал для передачи давления источника рабочей жидкости Рб на соответствующую сторону поршня силового цилиндра 13. Стрелками на рисунке показана подача рабочей жидкости высокого давления. В результате шток 14 силового цилиндра перемещается и через кинематическую передачу поворачивает руль высоты 15.
Рис. 2. Схема привода
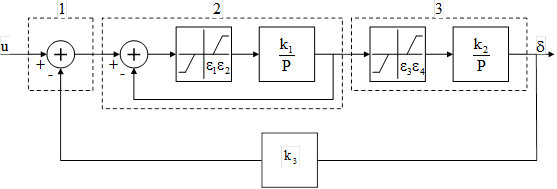
Структурная схема электрогидравлического привода представлена на рис. 3.
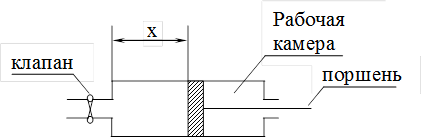
Для пояснения способа получения структурной схемы обратимся к рис. 4, на котором изображено простейшее гидравлическое устройство. В камеру гидравлического устройства поступает жидкость, расход которой регулируется клапаном. (Под расходом жидкости понимается изменение её объема в единицу времени).
На рис. 3 приняты следующие обозначения: 1 – сравнивающее устройство; 2 – золотник; 3 – силовой механизм.
Рис. 4. Гидравлическое устройство
Если полагать, что расход жидкости пропорционален перемещению клапана r, то изменение объема жидкости в рабочей камере также пропорционально величине r. Поэтому скорость перемещения поршня пропорциональна величине r, т.е.
, (24)
где k – коэффициент пропорциональности.
Передаточная функция от величины r к x равна, очевидно, .
Нелинейные звенья вводятся для учета сил трения поршня о стенки рабочей камеры золотника и рабочего механизма (начальный участок нелинейной характеристики) и для учета ограничений величин максимальных расходов жидкости (конечный участок нелинейных характеристик).
Для расчетов предлагаются следующие величины числовых данных: , , , угол наклона нелинейных характеристик равен 45 0.
Максимальные углы отклонения стабилизатора составляют ±30 0 и достигаются в установившемся режиме при величине входного напряжения ±30 В.
1.6Математические модели датчиков угловой скорости и перегрузки
Приборы, предназначенные для получения сигналов, пропорциональных угловой скорости самолёта, так называемые датчики угловых скоростей (ДУС), обычно выполняются в виде гироскопа с двумя степенями свободы. С помощью указанных приборов вводится производная в закон регулирования. При этом гироскопические измерители угловой скорости обычно располагают на самолёте таким образом, что оси гироскопа оказываются параллельными соответствующим осям самолёта.
На рис. 5 приведена схема прибора (демпфирующего гироскопа), предназначенного для измерения угловой скорости тангажа.
Ротор гироскопа вращается вокруг оси с большой угловой скоростью . в этом случае ротор гироскопа обладает большим кинетическим моментом , где – момент инерции ротора гироскопа относительно оси . Пусть Jx – момент инерции гироскопа вместе с рамкой относительно оси Ox. Тогда уравнение моментов относительно оси Ox имеет следующий вид:
*) , (25)
где первое слагаемое в правой части равенства представляет собой гироскопический момент, Мп – момент пружины, Мд – момент демпфера. Проектируя это уравнение на ось Ox и полагая, что
, (26)
, (27)
где – жесткость пружины, f – коэффициент демпфирования, получим
. (28)
Полагая величину малой, пренебрегая величиной по сравнению с , поскольку величина скорости вращения гироскопа велика, и введя обозначения
, , , (29)
получим дифференциальное уравнение второго порядка
. (30)
Поскольку электрический сигнал с выхода потенциометрического датчика пропорционален углу , то окончательно получим следующее выражение передаточной функции демпфирующего гироскопа:
. (31)
Значения параметров передаточной функции , с, .
Для измерения нормальной перегрузки используем осевой акселерометр. Схема осевого акселерометра представлена на рис. 6.
Рис. 6. Схема осевого акселерометра
Акселерометр, иначе называемый датчиком линейных ускорений (ДЛУ), во избежание зависимостей его показаний от угловых скоростей самолёта, устанавливается в центр тяжести самолёта. Его принципиальную схему можно представить в виде винтовой пружины k , один конец которой скреплен с корпусом прибора, а другой с массой , имеющей возможность перемещаться в направляющих, параллельных оси пружины. Эти направляющие определяют ось чувствительности прибора.
Если самолёт, несущий ДЛУ, движется с ускорением, причём по оси чувствительности ДЛУ направлена составляющая этого ускорения, то сумма сил, действующих на массу , равна
, (32)
.*) (33)
Здесь — жёсткость пружины, — коэффициент успокоительного демпфера. Изменение положения подвижной массы акселерометра фиксируется потенциометрическим или индукционным линейным датчиком. Таким образом, передаточная функция акселерометра, определяемая как отношение изображений по Лапласу электрического выходного сигнала акселерометра к нормальному ускорению самолёта при нулевых начальных условиях, записывается следующим образом:
. (34)
Значения параметров передаточной функции осевого акселерометра с, , В/ед.
1.7Математическая модель датчика положения штурвала
Схема включения датчика положения штурвала летчика представлена на рис. 7. На схеме обозначены:
2 – загрузочные пружины;
3 – потенциометрический датчик положения ручки.
Управлять самолетом, не ощущая усилий на ручке, ориентируясь только по ее положению, чрезвычайно трудно. Поэтому искусственно создают имитирующее усилие на штурвале управления с помощью загрузочных пружин.
Сигнал с выхода потенциометрического датчика пропорционален отклонению штурвала летчика. Для численных расчетов полагаем величину коэффициента пропорциональности между перемещением штурвала и выходным напряжением датчика равной 0,1 В/мм. Максимальные величины отклонения штурвала составляют ± 100 мм.
Рис. 7. Упрощенная схема штурвала летчика
2.1Общие положения
Требуется разработать алгоритм ручного управления продольным движением самолета для одного из режимов полета в соответствии с заданным номером варианта. Исходные данные для проектирования представлены в таблице 1.
2.2Требования к статическим характеристикам
Расход штурвала летчика на единицу перегрузки должен быть не менее 40 мм и не более 60 мм.
2.3Требования к динамическим характеристикам
При ступенчатом отклонении штурвала время регулирования по нормальной перегрузке не должно превышать 1,5 сек. при величине перерегулирования не более 10%. Переходный процесс по угловой скорости тангажа по времени регулирования не нормируется, но перерегулирование при ступенчатом отклонении штурвала не должно превышать 100%.
2.4Требования к разбросам параметров
Динамические и статические характеристики системы управления должны удовлетворять сформулированным выше требованиям при неопределенности эффективности стабилизатора в пределах ±20%.
2.5Дополнительные требования
Допускаются автоколебания по перегрузке с амплитудой не более 0,02.
Целью работы является расчет алгоритма управления продольным движением самолета, обеспечивающего выполнение требований к характеристикам системы управления, сформулированным в техническом задании. Функциональная схема проектируемой системы представлена на рис. 8.
Рис. 8. Функциональная схема проектируемой системы управления.
В качестве инструмента расчётов рекомендуется использовать пакет MATLAB [6], [7]. Предлагается следующий план выполнения работы.
3.1Этап анализа
3.1.1. Записать полную систему дифференциальных уравнений неизменяемой части системы с учётом динамики датчика угловых ускорений и акселерометра. Записать упрощенную полную систему дифференциальных уравнений неизменяемой части системы (разомкнутой системы) без учёта нелинейностей рулевого привода. Рассчитать собственные числа разомкнутой системы и установить принадлежность соответствующих собственных чисел собственно самолёту, рулевому приводу, каждому из датчиков.
3.1.2. Рассчитать передаточные функции разомкнутой системы от управления u на входе привода до угла атаки , а также до сигналов перегрузки , и угловой скорости тангажа . Определить полюсы и нули всех передаточных функций.
3.1.3. Рассчитать логарифмические частотные характеристики, соответствующие п. 3.1.2 с учётом и без учёта динамики датчиков и рулевого привода.
3.1.4. Построить переходные характеристики, соответствующие п. 3.1.3, выбирая величину входного ступенчатого воздействия на входе привода такой, чтобы в установившемся режиме nyуст. =1 Оценить временные характеристики (перерегулирование, время регулирования, время нарастания). Провести сопоставительный анализ результатов выполнения п.п. 3.1.1 – 3.1.4.
3.1.5. Выбрать расчетную модель объекта управления, проводя, если это возможно, упрощения динамики самолета с приводами и датчиками. Выбрать желаемые собственные значения матриц динамики замкнутой непрерывной системы, учитывая заданные требования к временным характеристикам и необходимость использования по возможности небольших величин коэффициентов обратных связей.
3.2Этап синтеза
3.2.1. Рассчитать обратную связь по полному вектору состояния и коэффициент передачи по внешнему управлению от датчика положения штурвала самолета.
3.2.2. Рассчитать переходные функции в линейной системе с обратной связью по полному вектору состояния, выбирая в качестве ступенчатого воздействия по координате Vp величину, соответствующую в установившемся режиме единичной перегрузке.
3.2.3. Выбрать параметры наблюдателя полного порядка.
3.2.4. Рассчитать переходные функции линейной системы с наблюдателем.
3.2.5. Синтезировать наблюдатель минимального порядка (аналогично п.п. 3.2.3 – 3.2.4).
3.2.6. Рассчитать переходные процессы в полной нелинейной системе с учетом всех нелинейностей рулевого привода и динамики датчиков.
3.2.7. Провести анализ возможности возникновения автоколебаний и определить их параметры методом гармонической линеаризации, учитывая только нелинейность золотника привода (с учетом динамики датчиков).
Если автоколебания превышают допустимый по техническому заданию уровень, то выработать рекомендации для уменьшения амплитуды автоколебаний.
3.2.8. В соответствии с правилами оформления студенческих работ [5] оформить пояснительную записку и подготовить 5‑минутный доклад для защиты работы в комиссии.
Одними из существенных достоинств методики модального синтеза являются простые связи между назначаемыми собственными значениями и векторами, и свойствами синтезируемой системы, позволяющие эффективно рассчитывать алгоритмы управления. Однако выбор желаемых собственных значений и векторов является наиболее трудным и ответственным моментом методики. Трудность выбора желаемых собственных значений и векторов обусловлена, как правило, противоречивостью и многообразием требований, предъявляемых к свойствам синтезируемой системы, а также необходимостью прибегать к численным расчетам.
Выбор желаемых значений и векторов представляет собой неформальную исследовательскую задачу, решением которой является обоснованный выбор совокупности этих значений.
В рамках курсовой работы предлагается рассчитать систему со скалярным (единственным) управлением. Известно, что при замыкании системы обратными связями по переменным состояния, передаточные функции разомкнутой и замкнутой систем имеют одинаковые (с точностью до постоянного множителя) числители, и, следовательно, одинаковые нули передаточных функций.
Введение наблюдателя в состав алгоритмов управления приводит к тому, что передаточные функции замкнутых систем не меняются по сравнению с аналогичными передаточными функциями систем с полным вектором обратной связи. Фактически это достигается тем, что желаемые собственные значения наблюдателей одновременно являются и нулями и полюсами передаточных функций замкнутых систем, и, следовательно, формально сокращаются. Однако следует помнить, что реально числовые данные параметров объекта известны приближенно, и в реальных условиях полюсы наблюдателя уже не будут компенсироваться соответствующими нулями, хотя величины нулей и полюсов могут быть близки друг к другу.
Таким образом, учет разбросов параметра в уравнениях объекта помимо всего прочего накладывает и ограничения на выбор желаемых собственных значений наблюдателя.
В рамках курсовой работы для уменьшения общего объема работы рекомендуется выбирать желаемые собственные значения наблюдателя так, чтобы элементарные составляющие движений, обусловленные этими собственными значениями успокаивались несколько быстрее, чем результирующие переходные процессы.
Возвращаясь к замкнутой системе с полным вектором обратной связи, следует отметить, что предлагаемый объект управления имеет пару доминирующих комплексно-сопряженных полюсов в передаточной функции. Под доминирующими полюсами понимаются полюсы передаточных функций с существенно меньшими модулями вещественных частей по сравнению с другими полюсами. Поэтому оценку временны¢х характеристик переходных процессов можно проводить, только опираясь на характеристики элементарных составляющих переходных процессов, обусловленных доминирующими полюсами.
Поясним ситуацию на примере передаточной функции системы по перегрузке. Типичная картина расположения нулей и полюсов представлена на рис. 9.
Рис. 9. Расположение нулей и полюсов передаточной разомкнутой системы по перегрузке:
p1 , p2 – доминирующая пара полюсов объекта;
p3 , p4 – полюсы передаточной функции привода;
n1 , n2 – нули передаточной функции.
При рассмотрении переходной функции системы с передаточной функцией можно воспользоваться разложением на элементарные дроби:
. (35)
Предположим, что (часто это условие выполняется, когда ). Тогда можно приближенно записать:
. (36)
Коэффициенты C1, C2 являются комплексно-сопряженными, поскольку они соответствуют комплексно-сопряженным полюсам p1 , p2 и являются, очевидно, вычетами функции .
Таким образом, составляющие переходных функций, соответствующие доминирующим полюсам, определяются с помощью временных характеристик звена второго порядка. Изучив связь между расположением на комплексной плоскости полюсов передаточной функции типового колебательного звена и его переходной функцией, можно целенаправленно назначать доминирующие желаемые полюсы передаточной функции (собственные числа матрицы динамики) замкнутой системы.
Полином является полиномом числителя разомкнутой системы по перегрузке и не зависит от обратных связей и, следовательно, от желаемых собственных значений.
Полюсы передаточной функции привода не оказывают существенного влияния на переходные процессы, поскольку расположены сравнительно далеко от мнимой оси. При выборе желаемых собственных значений p3 и p4 следует учесть только необходимость получения небольших по модулю величин коэффициентов обратных связей, поскольку. Желаемые собственные значения p3 и p4 можно назначить совпадающими с полюсами привода. Здесь, однако, следует обратить внимание на то, что программы расчета обратных связей на ЭВМ, предлагаемые для расчетов [6], [7], требуют отличия всех желаемых значений по сравнению с исходными. Поэтому рекомендуется желаемые значения p3 и p4 изменить на доли процента по сравнению с полюсами привода.
1. Страшинин Е.Э. Основы теории автоматического управления. Часть 1: Линейные непрерывные системы управления: Учебное пособие. Екатеринбург: УГТУ-УПИ. 2000 — 214 с.
2. Практическая аэродинамика маневренных самолетов/ Под ред. Н.М. Лысенко. М.:Воениздат, 1977. 439 с.
5. Панов Г.И. Методическое руководство по оформлению пояснительной записки для курсового и дипломного проектирования. Свердловск: УПИ, 1981. 23 с.
5. Соколов С.С. Рекомендации по оформлению курсовых, выпускных и дипломных проектов (работ). Методические указания. Электронная версия http://www.ait.ustu.ru/books/ Методические указания/ Правила оформления. Екатеринбург: ГОУ ВПО УГТУ-УПИ, 2006. 24 с.
6 Медведев В.С., Потёмкин В.Г. Control System Toolbox. MATLAB для студентов / Под общ. ред. к.т.н. В.Г. Потёмкина. – М.: ДИАЛОГ-МИФИ, 1999. – 287 с.
7 А.В. Малов, Е.Э. Страшинин Пакет математического моделирования Matlab v6.0: Краткое справочное руководство к лабораторным работам по дисциплине «Теория автоматического управления» / Екатеринбург: ГОУ ВПО УГТУ-УПИ, 2005. 52 с.
*) Векторным произведением векторов и (обозначается ) называется вектор , длина которого равна произведению absinj (j — угол между векторами и ) и который направлен перпендикулярно и в такую сторону, чтобы три вектора , и образовали правую тройку (т.е. чтобы после совмещения начал векторов , и кратчайший поворот от к казался наблюдателю, смотрящему с конца вектора , идущим против часовой стрелки
*) Студентам рекомендуется самостоятельно проанализировать, как влияет на выходной сигнал акселерометра сила тяжести G а) при горизонтальном полёте; б) при стоянке на взлётной полосе; в) при свободном падении с нулевым креном и с горизонтальным расположением продольной оси ОХ.
РАЗДЕЛЕНИЕ УРАВНЕНИЙ ВОЗМУЩЕННОГО ДВИЖЕНИЯ САМОЛЕТА. УРАВНЕНИЯ ПРОДОЛЬНОГО И БОКОВОГО ДВИЖЕНИЯ
Исследование движения самолета можно существенно упростить, если иметь в виду симметричность самолета относительно плоскости OXY и принять за опорное движение прямолинейный полет без крена и скольжения.
При этих условиях первые производные сил и моментов FXK FVK и МВг, действующих в продольной плоскости по параметрам бокового движения (Р, у, сож, со у, 6Н, 68, …), будут равны нулю /=fK =
= Fxк == Fyn — … = МВх = … =0. Это объясняется тем, что разложение сил и моментов в ряд Тейлора при линеаризации уравнений проводилось в окрестности опорного движения, а производные FXK, FyK, … в точке, соответствующей опорному движению, равны нулю в силу симметрии функции типа Fxl. = / ((5) (рис. 15.1).
Производные сил и моментов FZH, MRx и МПу, действующих в плоскостях XOZ и YOZ по параметрам продольного движения, также равны нулю, так как изменение этих параметров в плоскости XOY не может привести к скольжению или крену, а следовательно, и к возникновению боковых сил и моментов в возмущенном движении, которые отсутствовали в опорном. Следовательно,
Flк = Пк = міх = му = м%х = М% = • •. = 0.
Таким образом, система уравнений (15.8) разделяется на две независимые подсистемы, одна нз которых описывает продольное возмущенное движение, а другая — боковое.
Система уравнений, описывающая продольное возмущенное движение
mAV — FVXK AV — F*к Да — fl ДЄ = 7 Дб0. у + F™ АР + Fx к.»;
>»V° Д8 — F^k AV — f“k Да — F®K ДЄ = fJ°- * Д60. y + FyK AP + Fy »; Jt A&e — MRz A V — М%г Aa — M.% Да — Да», =
АІ = cos 0° Д V — V° sin 0° Д6;
AH = sin 0° Д V + У0 cos 0° Д0.
* В этих уравнениях под А60. у понимается приращение угла отклонения руля высоты, управляемого стабилизатора или элевонов.
Рис. 15.1. Зависимость продольных сил и
Л 0 +fi моментов от параметров бокового движения
Конспект лекций по дисциплине «Устойчивость и управляемость транспортных воздушных судов» (специальность 13.01.09). Объем 16 лекций (стр. 1 )
Из за большого объема этот материал размещен на нескольких страницах: 1 2 3 4 5 6 7 8 9
Федеральное агентство по образованию Российской Федерации
Московский авиационный институт
(государственный технический университет)
Конспект лекций по дисциплине
«Устойчивость и управляемость транспортных воздушных судов»
Объем 16 лекций
Конспект лекций написан на основе курса лекций, прочитанного студентам специальности 13.01.09. В курсе в основном рассматривается класс транспортных самолетов, которые будем называть «воздушными судами» (ВС) с дозвуковыми скоростями полета нормальной схемы. Предполагается, что на таких ВС установлена необратимая бустерная система управления (НБУ).
Основные определения и понятия устойчивости и управляемости используются для ВС, как жесткого тела без учета упругих колебаний крыла, фюзеляжа и других элементов конструкции.
Дается подробный анализ и исследование продольного движения ВС с выводом выражений для аэродинамических сил и моментов, балансировки, показателей устойчивости и управляемости, диапазона допустимых центровок. Приводится алгоритм выбора параметров горизонтального оперения. Для бокового движения принята та же схема изучения теоретического материала, но в упрощенном варианте без подробного вывода расчетных формул, с акцентом на особенности бокового движения, физические причины взаимосвязи «каналов» крена и рыскания.
Изучается динамика возмущенного движения с применением различных методов исследования. Устойчивость движения рассматривается с использованием теорем
об устойчивости по первому приближению. Характеристики управляемого движения ВС изучаются с помощью передаточных функций и частотных методов. Анализируется раздельно продольное и боковое возмущенные движения. Показывается особенность динамики пространственного движения, авторотации, режимов сваливания и штопора.
Рассматриваются: структура современной системы управления ВС, вопросы улучшения пилотажных характеристик и автоматического управления. Приведен обзор основных требований к летно-техническим и пилотажным характеристикам ВС.
1.(Лекция1)Введение. Устойчивость и управляемость движения. Общие понятия………………………………………………………………………………………….Виды устойчивости движения……………………………………………………………. . 5
2. (Лекция 2) Моменты, действующие на ВС в полете……………………………………. 8
2.1. Аэродинамический момент тангажа в установившемся прямолинейном полете……..9
2.2. Момент тангажа от тяги двигателей……………………………………………………. .12
Приложение 1. Категории посадочных минимумов. Оценки пилотом технических показателей совершенства ВС. Требования к летно- техническим характеристикам ВС. Требования к пилотажным характеристикам ВС……………………………………………….83
Приложение 2. Частотные критерии устойчивости и нормирование запасов устойчивости.
Вопросы к коллоквиуму по курсу «Устойчивость и управляемость транспортных воздушных судов» ……………………………………………………………………………………………. 90
Лекция 1.Введение. Устойчивость и управляемость движения. Общие понятия. Проанализируем сначала «устойчивость положения», как частный случай движения в фик — сированный момент времени. Пусть на сечении рельефа местности, изображенном на рис.1, находятся идеальной формы шарики. Для проверки устойчивости используем
«принцип малых возмущений» при малых отклонениях от опорного (заданного) положения. На рис.2 с тем же рельефом принята не горизонтальная, а наклонная поверхность, а в качестве «опорного» — принято движение по средней (нижней) линии желобка слева, в средней части – положение произвольно, а справа примем за опорное (желаемое) движение по верхней части выпуклого желобка. Аналогично с помощью «метода малых возмущений» можно проверить будет ли движение устойчиво или нет. Характер возмущенного (в отклонениях от опорного) движения зависит от «кривизны» склонов выгнутого и выпуклого желобков.
1.1. Виды устойчивости движения. Под устойчивостью ВС понимается его способность без участия пилота сохранять заданный опорный (невозмущенный) режим полета и возвращаться к нему после непроизвольного отклонения под действием внешних возмущений, при условии прекращения действия возмущений. Различают устойчивость «в малом» и устойчивость «в большом» соответственно при малых (конечных) и больших возмущениях. Меру «малости» возмущений к сожалению не всегда можно указать заранее. Остановимся на этой проблеме в разделе линеаризации уравнений возмущенного движения. В зависимости от вида опорного движения рассматривают статическую устойчивость (обычно при балансировочном прямолинейном или криволинейном движении) и динамическую устойчивость при произвольном опорном режиме движения.
В соответствии с видом переходного процесса различают апериодическую и колебательную устойчивость. Если переходный процесс (возмущенное движение) в пределе совпадает с опорным (невозмущенным) по времени при то устойчивость называют асимптотической. Иногда вводят понятие устойчивости на конечном отрезке времени. Важное место среди различных видов устойчивости занимает статическая устойчивость по выбранному параметру.
ВС будет статически устойчивым по выбранному параметру, если малое отклонение этого параметра (при всех остальных неизменных) от опорного значения сразу же приводит к появлению сил и/или моментов, направленных на уменьшение этого отклонения, после прекращения действия возмущений. Если силы и моменты направлены на увеличение этого отклонения, ВС – считается статически неустойчивым по этому выбранному параметру. В качестве параметра принимаются: коэффициент Cya, нормальная перегрузка nya, скорость V, угол атаки α, угол скольжения β и др. при их балансировочных значениях для опорного прямолинейного или криволинейного движения.
Для исследования динамической устойчивости (при возмущениях по начальным условиям), при построении систем автоматического управления широко применяют понятие устойчивости, предложенное академиком (для краткости называют устойчивость по Ляпунову). Рассмотрим это понятие более подробно.
Предполагается, что движение исследуемой динамической системы описывается векторным дифференциальным уравнением (в форме Коши) вида
(начальное условие (н. у.)),
где y-n-мерный фазовый вектор, u-m-мерный вектор управления, f(·) – вещественная непрерывная вектор функция, удовлетворяющая условиям Липшица, – производная по времени t. Пусть для некоторого ограниченного заданного закона управления uo(t),t ≥t0, через начальное состояние проходит невозмущенная (опорная, программная, исходная, желаемая) траектория и она единственная в силу решения задачи Коши. Ставится задача об исследовании поведения невозмущенной траектории в случае, если начальное значение отличается от . (т. е. имеется «возмущение» по начальным условиям).
Невозмущенная траектория исходной системы называется устойчивой поЛяпунову, если для любого ε > 0 можно подобрать δ(ε,to) > 0 такое, что для всякого решения y(t) той же системы, начальное значение которого удовлетворяет неравенству
||y(to) —|| 0 изображен для одной из компонентов вектора на рис. 3.
Если , то устойчивость будет асимптотической. Для случая двух компонент вектора устойчивое движение изображено на рис. 4 для «возмущения»
При определении динамической устойчивости в общем случае возможны возмущения более общего вида чем только отклонение по начальным условиям.
1.2. Управляемость движения.
Под управляемостью ВС понимается его способностью выполнять в ответ на целенаправленные действия пилота или автоматики любой, предусмотренный в процессе эксплуатации маневр (причем наиболее просто при минимальных затратах энергии пилота) в любых допустимых условиях полета, в том числе при наличии возмущений.
Управляемость различают: 1) продольную (относительно OZ) или по тангажу; 2) путевую (относительно OY) или по рысканию; 3) поперечную (относительно OX) или покрену.
В частности, в соответствии с основным определением, продольная управляемость – это свойство ВС переходить с одного продольного невозмущенного (опорного) движения (или режима полета) на другое по воле пилота при его воздействии на органы продольного управления: сектор газа и руль высоты.
Так же как и устойчивость, управляемость различают статическую и динамическую. Для пояснения статической управляемости целесообразно сначала дать определение балансировочных режимов полета.
Балансировочными называются режимы полета, в которых можно с достаточной степенью точности не учитывать в опорном движении, инерционную составляющую и считать действующие на ВС моменты «сбалансированными»: ,(в частности Отклонения органов управления для различных классов самолетов можно выделить следующие по крену: дифференциальное горизонтальное оперение (ГО), концевые рули, элевоны, элероны, флапероны, интерцепторы (спойлеры), поворотные концевые консоли крыла, руль направления, управляемое вертикальное оперение (ВО), струйные рули, управление вектором тяги, адаптивное крыло (дифференциальное изменение кривизны крыла); по курсу: руль направления, управляемое ВО, поворотный форкиль (гребень), струйные рули, управление передней стойкой шасси, расщепляющиеся рули, носовые рули, тормоза колес шасси; по тангажу: управляемое ГО (переднее, заднее), дифференциальное ГО, элевоны, струйные рули, управление вектором тяги, триммер, руль высоты.
Потребные отклонения органов управления ВС для режима балансировки называются балансировочными.
Под статической управляемостью ВС принимается его способность выполнять в ответ на действия органов управления переход из заданного состояния балансировки в новое состояние балансировки бесконечно близкое к исходному. Оценить качественно статическую управляемость можно для заданного опорного режима полета по значениям потребных для балансировки ВС отклонениям органов управления, перемещениям рычагов управления (штурвала, рычага, управления двигателем и т. д.), усилиям на них и их производным по некоторым из параметров движения.
При оценке динамической управляемости рассматривается характер реакции ВС на отклонение органов управления от их балансировочных значений при переходе от заданного балансировочного режима полета к другому произвольному с учетом возмущений и переходного движения.
Лекция 2.2. Моменты, действующие на ВС в полете
Результирующий момент складывается из аэродинамического и момента тяги В проекциях на связанные оси координат может быть представлен следующим образом
,
где — момент крена; — момент рыскания;— момент тангажа.
При этом определяются знаки моментов и соответствующих угловых скоростей вращения ВС по правилу «винта» (по часовой стрелке – положительно, если смотреть из начала координат, обычно расположенных в центре тяжести (ЦТ) или центре масс (ЦМ) ВС.
Правила знаков простейших органов управления показаны на рис. 5.
Обозначения: угловая скорость кренаx, рысканияy – и тангажа – z, отклонения управляющих органов: руля высоты , управляемого (перестановочного) стабилизатора , руля направления , элеронов обычных (концевых) , элеронов корневых , элевонов , закрылков , щелевых интерцепторов: корневого левого ; среднего левого ; корневого правого ; соответственно в/н для верхних и нижних. В случае дифференциального отклонения каких-либо органов управления значения их углов указываются раздельно для правых и левых. На рис 5. знаком + указаны положительные значения углов, угловых скоростей, моментов, перемещений, усилий.
2.1. Аэродинамический момент тангажа в установившемся прямолинейном полете.
Выделяя основные составляющие, момент Мz удобно представить как алгебраическую сумму аэродинамических моментов тангажа ВС без ГО момента ГО (при нейтральном положении органов управления ) и управляющих моментов ВС:
Второй из перечисленных моментов тангажа в зависимости от угла установки стабилизатора — , фактически также является управляющим и может быть объединен с последним.
Рассмотрим аэродинамический момент тангажа в установившемся (V=const) прямолинейном(θ=const) полете без крена (=0) и скольжения (β=0).
Для ВС нормальной схемы (см. рис.6), условно в прямолинейном полете близком к горизонтальному (Н ≈const,) показаны аэродинамические силы (за исключением Ха), которые создают основной момент относительно ОZ. Подъемная сила всех частей ВС за исключением ГО, зависящая от угла атаки (кроме )приложена в фокусе ВС без ГО (обозначен ).
Под фокусом по углу атаки будем понимать точку пересечения линии действия полной
аэродинамической силы зависящей только от угла атаки, с продольной осью ВС.
В частности вместо составляющей полной аэродинамической силы с некоторой погрешностью можно принять составляющую подъемной силы, зависящей от угла атаки.
Если ось OZ поместить в эту точку и вычислить продольный моментто в силу равенства нулю плеча действия сил, зависящих от , производная моментапри всех осталь-
ных фиксированных параметрах:и т. д.
Так же как и аэродинамические силы по принципу суперпозиции складываются из сил,
действующих на отдельные части ВС (крыло, фюзеляж и др.) так и фокус (для краткости «по углу атаки » будем опускать) зависит от фокуса крыла, фюзеляжа и др. Поэтому можно считать, что подъемная сила всех частей ВС без ГО приложена в фокусе всех частей ВС без ГО. При этом полная подъемная сила (для статически устойчивого ВС)
Здесь отметим, что аналогично можно ввести понятия фокуса по отклонению руля высоты,
закрылков и др. отклоняемых органов управления при малых их отклонениях и фиксированных остальных параметрах (углах).
Аэродинамический момент тангажа ВС запишем в следующем виде
где
Здесь индексами обозначены составляющие момента тангажа: «кр»- от крыла; «ГО»-от горизонтального оперения; «ф»- от фюзеляжа; «»-от гондол двигателей; «подв»- от различных подвесок. Можно обозначить Мz от всех частей кроме ГО как , а момент от стабилизатора и руля высоты .
 ,
, ,
, – равнодействующая всех сил;
– равнодействующая всех сил; – главный момент внешних сил самолёта, вектор суммарного вращающего момента;
– главный момент внешних сил самолёта, вектор суммарного вращающего момента; – вектор угловой скорости системы координат;
– вектор угловой скорости системы координат; – момент количества движения самолёта;
– момент количества движения самолёта; » обозначает векторное произведение. Далее переходят к обычной скалярной записи уравнений, проектируя векторные уравнения на некоторую систему координатных осей.
» обозначает векторное произведение. Далее переходят к обычной скалярной записи уравнений, проектируя векторные уравнения на некоторую систему координатных осей.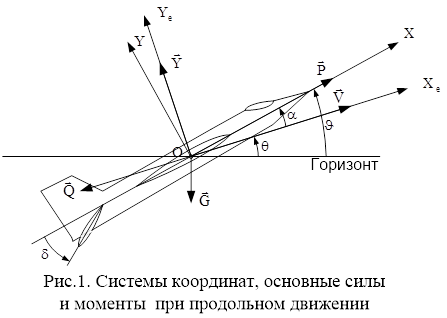
 – угол атаки,
– угол атаки,  – угол тангажа,
– угол тангажа,  – угол наклона траектории,
– угол наклона траектории,  – вектор воздушной скорости,
– вектор воздушной скорости,  – подъемная сила,
– подъемная сила,  – сила тяги двигателей,
– сила тяги двигателей,  – сила лобового сопротивления,
– сила лобового сопротивления,  – сила тяжести,
– сила тяжести,  – угол отклонения рулей высоты,
– угол отклонения рулей высоты,  – момент тангажа, вращающий самолёт вокруг оси ОZ.
– момент тангажа, вращающий самолёт вокруг оси ОZ. , (1)
, (1) – суммарный вектор внешних сил. Представим вектор скорости с использованием его модуля V и угла его поворота
– суммарный вектор внешних сил. Представим вектор скорости с использованием его модуля V и угла его поворота  .
. . (2)
. (2) ; (3)
; (3) . (4)
. (4) , (5)
, (5) , (6)
, (6) – (7)
– (7) . (8)
. (8) ; (9)
; (9) . (10)
. (10) есть функция скорости V и высоты H полёта, угла атаки
есть функция скорости V и высоты H полёта, угла атаки  , угловой скорости изменения угла тангажа (скорости вращения
, угловой скорости изменения угла тангажа (скорости вращения  самолёта вокруг связанной поперечной оси OZ) и угла отклонения руля высоты
самолёта вокруг связанной поперечной оси OZ) и угла отклонения руля высоты  :
: . (11)
. (11) – задаваемые табличным путём функции,
– задаваемые табличным путём функции, – плотность атмосферы,
– плотность атмосферы, (12)
(12) (13)
(13) ;
;  (14)
(14) и
и  являются чрезвычайно информативными с точки зрения оценки режима полёта и качества угловых процессов самолёта. Пренебрежём, как это часто делается для маневренных самолётов, слагаемым
являются чрезвычайно информативными с точки зрения оценки режима полёта и качества угловых процессов самолёта. Пренебрежём, как это часто делается для маневренных самолётов, слагаемым  в правой части уравнения (13). С учётом равенства (6) получим уравнение для производной приращения угла атаки:
в правой части уравнения (13). С учётом равенства (6) получим уравнение для производной приращения угла атаки: (15)
(15) (16)
(16) (17)
(17) и пренебрегая величиной
и пренебрегая величиной  , с учётом (14) для углов, измеряемых не в радианах, а в градусах, получим:
, с учётом (14) для углов, измеряемых не в радианах, а в градусах, получим: . (18)
. (18) м/с 2 .
м/с 2 . , получим формулу для приращения ускорения самолёта по оси подъёмной силы:
, получим формулу для приращения ускорения самолёта по оси подъёмной силы: . (19)
. (19) . (20)
. (20) выражением (15), получим следующие уравнения состояния:
выражением (15), получим следующие уравнения состояния: , (21)
, (21) , (22)
, (22) , (23)
, (23) – скорость звука на данной высоте.
– скорость звука на данной высоте.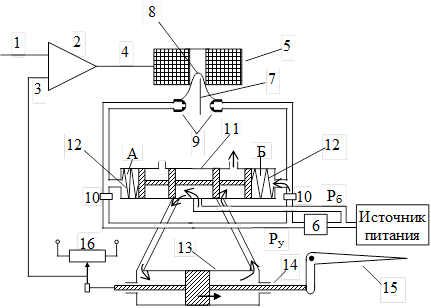
 , (24)
, (24) .
. ,
,  ,
,  ,
, 


 угол наклона нелинейных характеристик равен 45 0.
угол наклона нелинейных характеристик равен 45 0.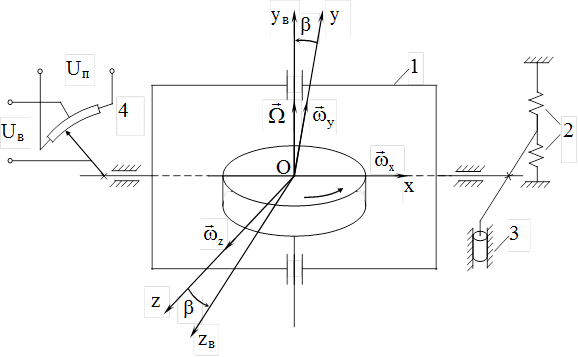 Рис. 5. Упрощенная схема демпфирующего гироскопа: 1 – двухстепенной гироскоп; 2 – пружина; 3 – демпфер; 4 – потенциометрический датчик.
Рис. 5. Упрощенная схема демпфирующего гироскопа: 1 – двухстепенной гироскоп; 2 – пружина; 3 – демпфер; 4 – потенциометрический датчик. с большой угловой скоростью
с большой угловой скоростью  . в этом случае ротор гироскопа обладает большим кинетическим моментом
. в этом случае ротор гироскопа обладает большим кинетическим моментом  , где
, где  – момент инерции ротора гироскопа относительно оси
– момент инерции ротора гироскопа относительно оси  . Пусть Jx – момент инерции гироскопа вместе с рамкой относительно оси Ox. Тогда уравнение моментов относительно оси Ox имеет следующий вид:
. Пусть Jx – момент инерции гироскопа вместе с рамкой относительно оси Ox. Тогда уравнение моментов относительно оси Ox имеет следующий вид: *) , (25)
*) , (25) , (26)
, (26) , (27)
, (27) – жесткость пружины, f – коэффициент демпфирования, получим
– жесткость пружины, f – коэффициент демпфирования, получим . (28)
. (28) малой, пренебрегая величиной
малой, пренебрегая величиной  по сравнению с
по сравнению с  , поскольку величина скорости вращения гироскопа велика, и введя обозначения
, поскольку величина скорости вращения гироскопа велика, и введя обозначения ,
,  ,
,  , (29)
, (29) . (30)
. (30) , то окончательно получим следующее выражение передаточной функции демпфирующего гироскопа:
, то окончательно получим следующее выражение передаточной функции демпфирующего гироскопа: . (31)
. (31) ,
,  с,
с,  .
.
 , имеющей возможность перемещаться в направляющих, параллельных оси пружины. Эти направляющие определяют ось чувствительности прибора.
, имеющей возможность перемещаться в направляющих, параллельных оси пружины. Эти направляющие определяют ось чувствительности прибора. этого ускорения, то сумма сил, действующих на массу
этого ускорения, то сумма сил, действующих на массу  , (32)
, (32) .*) (33)
.*) (33) — жёсткость пружины,
— жёсткость пружины,  — коэффициент успокоительного демпфера. Изменение положения подвижной массы акселерометра
— коэффициент успокоительного демпфера. Изменение положения подвижной массы акселерометра  фиксируется потенциометрическим или индукционным линейным датчиком. Таким образом, передаточная функция акселерометра, определяемая как отношение изображений по Лапласу электрического выходного сигнала акселерометра к нормальному ускорению самолёта при нулевых начальных условиях, записывается следующим образом:
фиксируется потенциометрическим или индукционным линейным датчиком. Таким образом, передаточная функция акселерометра, определяемая как отношение изображений по Лапласу электрического выходного сигнала акселерометра к нормальному ускорению самолёта при нулевых начальных условиях, записывается следующим образом: . (34)
. (34) с,
с,  ,
,  В/ед.
В/ед.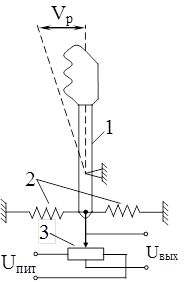
 в пределах ±20%.
в пределах ±20%.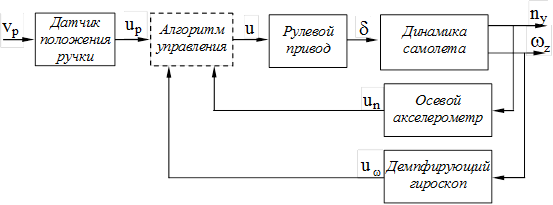
 , а также до сигналов перегрузки
, а также до сигналов перегрузки  , и угловой скорости тангажа
, и угловой скорости тангажа  . Определить полюсы и нули всех передаточных функций.
. Определить полюсы и нули всех передаточных функций. в уравнениях объекта помимо всего прочего накладывает и ограничения на выбор желаемых собственных значений наблюдателя.
в уравнениях объекта помимо всего прочего накладывает и ограничения на выбор желаемых собственных значений наблюдателя.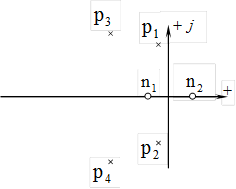
 можно воспользоваться разложением
можно воспользоваться разложением  на элементарные дроби:
на элементарные дроби: . (35)
. (35) (часто это условие выполняется, когда
(часто это условие выполняется, когда  ). Тогда можно приближенно записать:
). Тогда можно приближенно записать: . (36)
. (36) .
. является полиномом числителя разомкнутой системы по перегрузке и не зависит от обратных связей и, следовательно, от желаемых собственных значений.
является полиномом числителя разомкнутой системы по перегрузке и не зависит от обратных связей и, следовательно, от желаемых собственных значений. и
и  (обозначается
(обозначается  ) называется вектор
) называется вектор  , длина которого равна произведению absinj (j — угол между векторами
, длина которого равна произведению absinj (j — угол между векторами  ,
,  * В этих уравнениях под А60. у понимается приращение угла отклонения руля высоты, управляемого стабилизатора или элевонов.
* В этих уравнениях под А60. у понимается приращение угла отклонения руля высоты, управляемого стабилизатора или элевонов.


 то устойчивость называют асимптотической. Иногда вводят понятие устойчивости на конечном отрезке времени. Важное место среди различных видов устойчивости занимает статическая устойчивость по выбранному параметру.
то устойчивость называют асимптотической. Иногда вводят понятие устойчивости на конечном отрезке времени. Важное место среди различных видов устойчивости занимает статическая устойчивость по выбранному параметру.

 (начальное условие (н. у.)),
(начальное условие (н. у.)), – производная по времени t. Пусть для некоторого ограниченного заданного закона управления uo(t), t ≥ t0, через начальное состояние
– производная по времени t. Пусть для некоторого ограниченного заданного закона управления uo(t), t ≥ t0, через начальное состояние  проходит невозмущенная (опорная, программная, исходная, желаемая) траектория
проходит невозмущенная (опорная, программная, исходная, желаемая) траектория  и она единственная в силу решения задачи Коши. Ставится задача об исследовании поведения невозмущенной траектории в случае, если начальное значение
и она единственная в силу решения задачи Коши. Ставится задача об исследовании поведения невозмущенной траектории в случае, если начальное значение  отличается от
отличается от  . (т. е. имеется «возмущение» по начальным условиям).
. (т. е. имеется «возмущение» по начальным условиям). || 0 изображен для одной из компонентов вектора на рис. 3.
|| 0 изображен для одной из компонентов вектора на рис. 3.
 , то устойчивость будет асимптотической. Для случая двух компонент вектора
, то устойчивость будет асимптотической. Для случая двух компонент вектора  устойчивое движение изображено на рис. 4 для «возмущения»
устойчивое движение изображено на рис. 4 для «возмущения» 

 и считать действующие на ВС моменты «сбалансированными»:
и считать действующие на ВС моменты «сбалансированными»:  ,
, (в частности
(в частности  Отклонения органов управления для различных классов самолетов можно выделить следующие по крену: дифференциальное горизонтальное оперение (ГО), концевые рули, элевоны, элероны, флапероны, интерцепторы (спойлеры), поворотные концевые консоли крыла, руль направления, управляемое вертикальное оперение (ВО), струйные рули, управление вектором тяги, адаптивное крыло (дифференциальное изменение кривизны крыла); по курсу: руль направления, управляемое ВО, поворотный форкиль (гребень), струйные рули, управление передней стойкой шасси, расщепляющиеся рули, носовые рули, тормоза колес шасси; по тангажу: управляемое ГО (переднее, заднее), дифференциальное ГО, элевоны, струйные рули, управление вектором тяги, триммер, руль высоты.
Отклонения органов управления для различных классов самолетов можно выделить следующие по крену: дифференциальное горизонтальное оперение (ГО), концевые рули, элевоны, элероны, флапероны, интерцепторы (спойлеры), поворотные концевые консоли крыла, руль направления, управляемое вертикальное оперение (ВО), струйные рули, управление вектором тяги, адаптивное крыло (дифференциальное изменение кривизны крыла); по курсу: руль направления, управляемое ВО, поворотный форкиль (гребень), струйные рули, управление передней стойкой шасси, расщепляющиеся рули, носовые рули, тормоза колес шасси; по тангажу: управляемое ГО (переднее, заднее), дифференциальное ГО, элевоны, струйные рули, управление вектором тяги, триммер, руль высоты. и момента тяги
и момента тяги  В проекциях на связанные оси координат
В проекциях на связанные оси координат  может быть представлен следующим образом
может быть представлен следующим образом ,
, — момент крена;
— момент крена;  — момент рыскания;
— момент рыскания;  — момент тангажа.
— момент тангажа.
 x, рыскания
x, рыскания  , управляемого (перестановочного) стабилизатора
, управляемого (перестановочного) стабилизатора  , руля направления
, руля направления  , элеронов обычных (концевых)
, элеронов обычных (концевых)  , элеронов корневых
, элеронов корневых  , элевонов
, элевонов  , закрылков
, закрылков  , щелевых интерцепторов: корневого левого
, щелевых интерцепторов: корневого левого  ; среднего левого
; среднего левого  ; корневого правого
; корневого правого  ; соответственно в/н для верхних и нижних. В случае дифференциального отклонения каких-либо органов управления значения их углов указываются раздельно для правых и левых. На рис 5. знаком + указаны положительные значения углов, угловых скоростей, моментов, перемещений, усилий.
; соответственно в/н для верхних и нижних. В случае дифференциального отклонения каких-либо органов управления значения их углов указываются раздельно для правых и левых. На рис 5. знаком + указаны положительные значения углов, угловых скоростей, моментов, перемещений, усилий. момента ГО
момента ГО  (при нейтральном положении органов управления
(при нейтральном положении органов управления  ) и управляющих моментов ВС
) и управляющих моментов ВС :
:
 , фактически также является управляющим и может быть объединен с последним.
, фактически также является управляющим и может быть объединен с последним. =0) и скольжения (β=0).
=0) и скольжения (β=0).
 ) показаны аэродинамические силы (за исключением Ха), которые создают основной момент относительно ОZ. Подъемная сила всех частей ВС за исключением ГО
) показаны аэродинамические силы (за исключением Ха), которые создают основной момент относительно ОZ. Подъемная сила всех частей ВС за исключением ГО , зависящая от угла атаки (кроме
, зависящая от угла атаки (кроме  )приложена в фокусе ВС без ГО (обозначен
)приложена в фокусе ВС без ГО (обозначен  ).
). зависящей только от угла атаки, с продольной осью ВС.
зависящей только от угла атаки, с продольной осью ВС. то в силу равенства нулю плеча действия сил, зависящих от
то в силу равенства нулю плеча действия сил, зависящих от  , производная момента
, производная момента при всех осталь-
при всех осталь- и т. д.
и т. д.



 »-от гондол двигателей; «подв»- от различных подвесок. Можно обозначить Мz от всех частей кроме ГО как
»-от гондол двигателей; «подв»- от различных подвесок. Можно обозначить Мz от всех частей кроме ГО как  , а момент от стабилизатора и руля высоты
, а момент от стабилизатора и руля высоты  .
.