Уравнение прямой, виды уравнения прямой на плоскости
В прошлом материале мы рассмотрели основные моменты, касающиеся темы прямой на плоскости. Теперь же перейдем к изучению уравнения прямой: рассмотрим, какое уравнение может называться уравнением прямой, а также то, какой вид имеет уравнение прямой на плоскости.
Определение уравнения прямой на плоскости
Допустим, что есть прямая линия, которая задана в прямоугольной декартовой системе координат O х у .
Прямая линия – это геометрическая фигура, которая состоит из точек. Каждая точка имеет свои координаты по осям абсцисс и ординат. Уравнение, которое описывает зависимость координат каждой точки прямой в декартовой системе O x y , называется уравнением прямой на плоскости.
Фактически, уравнение прямой на плоскости – это уравнение с двумя переменными, которые обозначаются как x и y . Уравнение обращается в тождество при подстановке в него значений любой из точек прямой линии.
Давайте посмотрим, какой вид будет иметь уравнение прямой на плоскости. Этому будет посвящен весь следующий раздел нашей статьи. Отметим, что существует несколько вариантов записи уравнения прямой. Объясняется это наличием нескольких способов задания прямой линии на плоскости, и также различной спецификой задач.
Общее уравнение прямой линии
Познакомимся с теоремой, которая задает вид уравнения прямой линии на плоскости в декартовой системе координат O x y .
Уравнение вида A x + B y + C = 0 , где x и y – переменные, а А , В и C – это некоторые действительные числа, из которых A и B не равны нулю, задает прямую линию в декартовой системе координат O x y . В свою очередь, любая прямая линия на плоскости может быть задана уравнением вида A x + B y + C = 0 .
Таким образом, общее уравнение прямой на плоскости имеет вид A x + B y + C = 0 .
Поясним некоторые важные аспекты темы.
Посмотрите на рисунок.
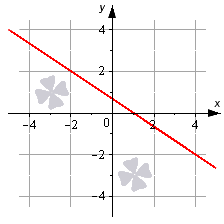
Линия на чертеже определяется уравнением вида 2 x + 3 y — 2 = 0 , так как координаты любой точки, составляющей эту прямую, удовлетворяют приведенному уравнению. В то же время, определенное количество точек плоскости, определяемых уравнением 2 x + 3 y — 2 = 0 , дают нам прямую линию, которую мы видим на рисунке.
Общее уравнение прямой может быть полным и неполным. В полном уравнении все числа А , В и C отличны от нуля. Во всех остальных случаях уравнение считается неполным. Уравнение вида A x + B y = 0 определяет прямую линию, которая проходит через начало координат. Если A равно нулю, то уравнение A x + B y + C = 0 задает прямую, расположенную параллельно оси абсцисс O x . Если B равно нулю, то линия параллельна оси ординат O y .
Вывод: при некотором наборе значений чисел А , В и C с помощью общего уравнения прямой можно записать любую прямую линию на плоскости в прямоугольной системе координат O х у .
Прямая, заданная уравнением вида A x + B y + C = 0 , имеет нормальный вектор прямой с координатами A , B .
Все приведенные уравнения прямых, которые мы рассмотрим ниже, могут быть получены из общего уравнения прямой. Также возможен и обратный процесс, когда любое из рассматриваемых уравнений может быть приведено к общему уравнению прямой.
Разобраться во всех нюансах темы можно в статье «Общее уравнение прямой». В материале мы приводим доказательство теоремы с графическими иллюстрациями и подробным разбором примеров. Особое внимание в статье уделяется переходам от общего уравнения прямой к уравнениям других видов и обратно.
Уравнение прямой в отрезках
Уравнение прямой в отрезках имеет вид x a + y b = 1 , где a и b – это некоторые действительные числа, которые не равны нулю. Абсолютные величины чисел a и b равны длине отрезков, которые отсекаются прямой линией на осях координат. Длина отрезков отсчитывается от начала координат.
Благодаря уравнению можно легко построить прямую линию на чертеже. Для этого необходимо отметить в прямоугольной системе координат точки a , 0 и 0 , b , а затем соединить их прямой линией.
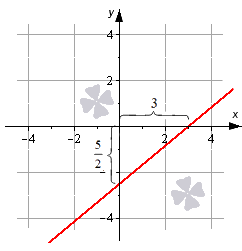
Построим прямую, которая задана формулой x 3 + y — 5 2 = 1 . Отмечаем на графике две точки 3 , 0 , 0 , — 5 2 , соединяем их между собой.
Дополнительно рекомендуем ознакомиться с материалом, изложенным в статье «Уравнение прямой в отрезках».
Уравнение прямой с угловым коэффициентом
Эти уравнения, имеющие вид y = k · x + b должны быть нам хорошо известны из курса алгебры. Здесь x и y – это переменные, k и b – это некоторые действительные числа, из которых k представляет собой угловой коэффициент. В этих уравнениях переменная у является функцией аргумента x .
Дадим определение углового коэффициента через определение угла наклона прямой к положительному направлению оси O x .
Для обозначения угла наклона прямой к положительному направлению оси O x в декартовой системе координат введем величину угла α . Угол отсчитывается от положительного направления оси абсцисс до прямой линии против хода часовой стрелки. Угол α считается равным нулю в том случае, если линия параллельна оси O x или совпадает с ней.
Угловой коэффициент прямой – это тангенс угла наклона этой прямой. Записывается это следующим образом k = t g α . Для прямой, которая располагается параллельно оси O y или совпадает с ней, записать уравнение прямой с угловым коэффициентом не представляется возможным, так как угловой коэффициент в этом случае превращается в бесконечность (не существует).
Прямая, которая задана уравнением y = k · x + b , проходит через точку 0 , b на оси ординат. Это значит, что уравнение прямой с угловым коэффициентом y = k · x + b , задает на плоскости прямую линию, которая проходит через точку 0 , b и образует угол α с положительным направлением оси O x , причем k = t g α .
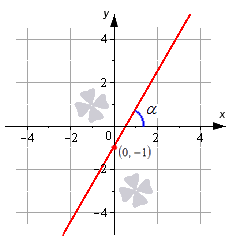
Изобразим прямую линию, которая определяется уравнением вида y = 3 · x — 1 .
Эта линия должна пройти через точку ( 0 , — 1 ) . Угол наклона α = a r c t g 3 = π 3 равен 60 градусов к положительному направлению оси O x . Угловой коэффициент равен 3
Обращаем ваше внимание, что с помощью уравнения прямой с угловым коэффициентом очень удобно искать уравнение касательной к графику функции в точке.
Больше материала по теме можно найти в статье «Уравнение прямой с угловым коэффициентом». Помимо теории там размещено большое количество графических примеров и подробный разбор задач.
Каноническое уравнение прямой на плоскости
Данный вид уравнения имеет вид x — x 1 a x = y — y 1 a y , где x 1 , y 1 , a x , a y — это некоторые действительные числа, из которых a x и a y не равны нулю.
Прямая линия, заданная каноническим уравнением прямой, проходит через точку M 1 ( x 1 , y 1 ) . Числа a x и a y в знаменателях дробей представляют собой координаты направляющего вектора прямой линии. Это значит, что каноническое уравнение прямой линии x — x 1 a x = y — y 1 a y в декартовой системе координат O x y соответствует линии, проходящей через точку M 1 ( x 1 , y 1 ) и имеющей направляющий вектор a → = ( a x , a y ) .
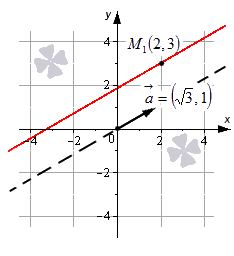
Изобразим в системе координат O x y прямую линию, которая задается уравнением x — 2 3 = y — 3 1 . Точка M 1 ( 2 , 3 ) принадлежит прямой, вектор a → ( 3 , 1 ) является направляющим вектором этой прямой линии.
Каноническое уравнение прямой линии вида x — x 1 a x = y — y 1 a y может быть использовано в случаях, когда a x или a y равно нулю. Наличие ноля в знаменателе делает запись x — x 1 a x = y — y 1 a y условной. Уравнение можно записать следующим образом a y ( x — x 1 ) = a x ( y — y 1 ) .
В том случае, когда a x = 0 , каноническое уравнение прямой принимает вид x — x 1 0 = y — y 1 a y и задает прямую линию, которая расположена параллельно оси ординат или совпадает с этой осью.
Каноническое уравнение прямой при условии, что a y = 0 , принимает вид x — x 1 a x = y — y 1 0 . Такое уравнение задает прямую линию, расположенную параллельно оси абсцисс или совпадающую с ней.
Больше материала на тему канонического уравнения прямой смотрите здесь. В статье мы приводим целый ряд решений задач, а также многочисленные примеры, которые позволяют лучше овладеть темой.
Параметрические уравнения прямой на плоскости
Данные уравнения имеют вид x = x 1 + a x · λ y = y 1 + a y · λ , где x 1 , y 1 , a x , a y — это некоторые действительные числа, из которых a x и a y не могут быть одновременно равны нулю. В формулу вводится дополнительный параметр λ , который может принимать любые действительные значения.
Назначение параметрического уравнения в том, чтобы установить неявную зависимости между координатами точек прямой линии. Для этого и вводится параметр λ .
Числа x , y представляют собой координаты некоторой точки прямой. Они вычисляются по параметрическим уравнениям прямой при некотором действительном значении параметра λ .
Предположим, что λ = 0 .
Тогда x = x 1 + a x · 0 y = y 1 + a y · 0 ⇔ x = x 1 y = y 1 , т. е. точка с координатами ( x 1 , y 1 ) принадлежит прямой.
Обращаем ваше внимание на то, что коэффициенты a x и a y при параметре λ в данном виде уравнений представляют собой координаты направляющего вектора прямой линии.
Рассмотрим параметрические уравнения прямой линии вида x = 2 + 3 · λ y = 3 + λ . Прямая, заданная уравнениями, в декартовой системе координат проходит через точку ( x 1 , y 1 ) и имеет направляющий вектор a → = ( 3 , 1 ) .
Больше информации ищите в статье «Параметрические уравнения прямой на плоскости».
Нормальное уравнение прямой
Нормальное уравнение прямой имеет вид , A x + B y + C = 0 , где числа А , В , и C таковы, что длина вектора n → = ( A , B ) равна единице, а C ≤ 0 .
Нормальным вектором линии, заданной нормальным уравнением прямой в прямоугольной системе координат O х у , является вектор n → = ( A , B ) . Эта прямая проходит на расстоянии C от начала координат в направлении вектора n → = ( A , B ) .
Еще одним вариантом записи нормального уравнения прямой линии является cos α · x + cos β · y — p = 0 , где cos α и cos β — это два действительных числа, которые представляют собой направляющие косинусы нормального вектора прямой единичной длины. Это значит, что n → = ( cos α , cos β ) , справедливо равенство n → = cos 2 α + cos 2 β = 1 , величина p ≥ 0 и равна расстоянию от начала координат до прямой.
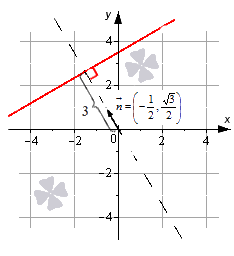
Рассмотрим общее уравнение прямой — 1 2 · x + 3 2 · y — 3 = 0 . Это общее уравнение прямой является нормальным уравнением прямой, так как n → = A 2 + B 2 = — 1 2 2 + 3 2 = 1 и C = — 3 ≤ 0 .
Уравнение задает в декартовой системе координат 0ху прямую линию, нормальный вектор которой имеет координаты — 1 2 , 3 2 . Линия удалена от начала координат на 3 единицы в направлении нормального вектора n → = — 1 2 , 3 2 .
Обращаем ваше внимание на то, что нормальное уравнение прямой на плоскости позволяет находить расстояние от точки до прямой на плоскости.
Если в общем уравнении прямой A x + B y + C = 0 числа А , В и С таковы, что уравнение A x + B y + C = 0 не является нормальным уравнением прямой, то его можно привести к нормальному виду. Подробнее об этом читайте в статье «Нормальное уравнение прямой».
Уравнения прямых и плоскостей
Поверхности и линии первого порядка.
Уравнение первой степени, или линейное уравнение, связывающее координаты точки в пространстве, имеет вид
$$
Ax+By+Cz+D = 0,\label
$$
причем предполагается, что коэффициенты при переменных не равны нулю одновременно, то есть \(A^<2>+B^<2>+C^ <2>\neq 0\). Аналогично, линейное уравнение, связывающее координаты точки на плоскости, — это уравнение
$$
Ax+By+C = 0,\label
$$
при условии \(A^<2>+B^ <2>\neq 0\).
В школьном курсе доказывается, что в декартовой прямоугольной системе координат уравнения \eqref
В общей декартовой системе координат в пространстве каждая плоскость может быть задана линейным уравнением
$$
Ax+By+Cz+D = 0.\nonumber
$$
Обратно, каждое линейное уравнение в общей декартовой системе координат определяет плоскость.
В общей декартовой системе координат на плоскости каждая прямая может быть задана линейным уравнением
$$
Ax+By+C = 0,\nonumber
$$
Обратно, каждое линейное уравнение в общей декартовой системе координат на плоскости определяет прямую.
Эти теоремы полностью решают вопрос об уравнениях плоскости и прямой линии на плоскости. Однако ввиду важности этих уравнений мы рассмотрим их в других формах. При этом будут получены независимые доказательства теорем этого пункта.
Параметрические уравнения прямой и плоскости.
Мы будем предполагать, что задана декартова система координат в пространстве (или на плоскости, если мы изучаем прямую в планиметрии). Это, в частности, означает, что каждой точке сопоставлен ее радиус-вектор относительно начала координат.
 Рис. 6.1
Рис. 6.1
Вектор \(\overrightarrow
$$
\boldsymbol
$$
Наоборот, какое бы число мы ни подставили в формулу \eqref
Уравнение \eqref
Векторное параметрическое уравнение выглядит одинаково и в планиметрии, и в стереометрии, но при разложении по базису оно сводится к двум или трем скалярным уравнениям, смотря по тому, сколько векторов составляют базис.
Получим теперь параметрические уравнения плоскости. Обозначим через \(\boldsymbol
\) и \(\boldsymbol\) ее направляющие векторы, а через \(\boldsymbol
 Рис. 6.2
Рис. 6.2
Вектор \(\overrightarrow
\) и \(\boldsymbol\) не коллинеарны, в этом и только этом случае \(\boldsymbol
$$
\boldsymbol
+t_<2>\boldsymbol.\label
$$
Это уравнение называется параметрическим уравнением плоскости. Каждой точке плоскости оно сопоставляет значения двух параметров \(t_<1>\) и \(t_<2>\). Наоборот, какие бы числа мы ни подставили как значения \(t_<1>\) и \(t_<2>\), уравнение \eqref
Пусть \((x, y, z)\) и \((x_<0>, y_<0>, z_<0>)\) — координаты точек \(M\) и \(M_<0>\) соответственно, а векторы \(\boldsymbol
\) и \(\boldsymbol\) имеют компоненты \((p_<1>, p_<2>, p_<3>)\) и \((q_<1>, q_<2>, q_<3>)\). Тогда, раскладывая по базису обе части уравнения \eqref
$$
x-x_ <0>= t_<1>p_<1>+t_<2>q_<1>,\ y-y_ <0>= t_<1>p_<2>+t_<2>q_<2>,\ z-z_ <0>= t_<1>p_<3>+t_<2>q_<3>.\label
$$
Отметим, что начальная точка и направляющий вектор прямой образуют на ней ее внутреннюю декартову систему координат. Значение параметра \(t\), соответствующее какой-то точке, является координатой этой точки во внутренней системе координат. Точно так же на плоскости начальная точка и направляющие векторы составляют внутреннюю систему координат, а значения параметров, соответствующие точке, — это ее координаты в этой системе.
Прямая линия на плоскости.
Поэтому мы можем сформулировать следующее утверждение.
В любой декартовой системе координат на плоскости уравнение прямой с начальной точкой \(M_<0>(x_<0>, y_<0>)\) и направляющим вектором \(\boldsymbol(a_<1>, a_<2>)\) может быть записано в виде \eqref
Уравнение \eqref
Вектор с координатами \((-B, A)\) можно принять за направляющий вектор прямой с уравнением \eqref
Если система координат декартова прямоугольная, то вектор \(\boldsymbol
Действительно, в этом случае \((\boldsymbol, \boldsymbol
Пусть в уравнении прямой \(Ax+By+C = 0\) коэффициент \(B\) отличен от нуля. Это означает, что отлична от нуля первая компонента направляющего вектора, и прямая не параллельна оси ординат. В этом случае уравнение прямой можно представить в виде
$$
y = kx+b,\label
$$
где \(k = -A/B\), а \(b = -C/B\). Мы видим, что к равно отношению компонент направляющего вектора: \(k = a_<2>/a_<1>\) (рис. 6.3).
 Рис. 6.3. k=-1. Прямая y=-x+1/2
Рис. 6.3. k=-1. Прямая y=-x+1/2
Отношение компонент направляющего вектора \(a_<2>/a_<1>\) называется угловым коэффициентом прямой.
Угловой коэффициент прямой в декартовой прямоугольной системе координат равен тангенсу угла, который прямая образует с осью абсцисс. Угол этот отсчитывается от оси абсцисс в направлении кратчайшего поворота от \(\boldsymbol
 Рис. 6.4. \(k=\operatorname
Рис. 6.4. \(k=\operatorname
Положив \(x = 0\) в уравнении \eqref
Если же в уравнении прямой \(B = 0\) и ее уравнение нельзя представить в виде \eqref
Векторные уравнения плоскости и прямой.
Параметрическое уравнение плоскости утверждает, что точка \(M\) лежит на плоскости тогда и только тогда, когда разность ее радиус-вектора и радиус-вектора начальной точки \(M_<0>\) компланарна направляющим векторам \(\boldsymbol
\) и \(\boldsymbol\). Эту компланарность можно выразить и равенством
$$
(\boldsymbol
, \boldsymbol) = 0.\label
$$
Вектор \(\boldsymbol
, \boldsymbol]\) — ненулевой вектор, перпендикулярный плоскости. Используя его, мы можем записать уравнение \eqref
$$
(\boldsymbol
$$
Уравнения \eqref
$$
(\boldsymbol
$$
Для прямой на плоскости можно также написать векторные уравнения, аналогичные \eqref
$$
(\boldsymbol
$$
Первое из них выражает тот факт, что вектор \(\boldsymbol
Пусть \(x, y, z\) — компоненты вектора \(\boldsymbol
Обратно, для любого линейного многочлена найдутся такие векторы \(\boldsymbol
Первая часть предложения очевидна: подставим разложение вектора \(\boldsymbol
$$
(x\boldsymbol
$$
раскроем скобки и получим многочлен \(Ax+By+Cz+D\), в котором \(D = -(\boldsymbol
$$
A = (\boldsymbol
$$
\(A\), \(B\) и \(C\) одновременно не равны нулю, так как ненулевой вектор \(\boldsymbol
Для доказательства обратного утверждения найдем сначала вектор \(\boldsymbol
$$
\boldsymbol
$$
Вектор \(\boldsymbol
Итак, мы нашли векторы \(\boldsymbol
$$
x(\boldsymbol
$$
который совпадает с требуемым \((\boldsymbol
Если система координат декартова прямоугольная, то вектор с компонентами \(A\), \(B\), \(C\) является нормальным вектором для плоскости с уравнением \(Ax+By+Cz+D = 0\).
Это сразу вытекает из формул \eqref
Любые два неколлинеарных вектора, удовлетворяющие уравнению \eqref
Утверждение 5 нетрудно доказать и непосредственно, рассматривая координаты вектора, параллельного плоскости, как разности соответствующих координат двух точек, лежащих в плоскости.
Все, сказанное о плоскостях, почти без изменений может быть сказано и о прямых на плоскости. В частности, верно следующее утверждение.
Действительно, \(\alpha_<1>, \alpha_<2>\), должны быть пропорциональны компонентам — \(B\), \(A\) направляющего вектора прямой.
Параллельность плоскостей и прямых на плоскости.
Ниже, говоря о параллельных прямых или плоскостях, мы будем считать, что параллельные плоскости (или прямые) не обязательно различны, то есть что плоскость (прямая) параллельна самой себе.
Прямые линии, задаваемые в общей декартовой системе координат уравнениями
$$
Ax+By+C = 0,\ A_<1>x+B_<1>y+C_ <1>= 0,\nonumber
$$
параллельны тогда и только тогда, когда соответствующие коэффициенты в их уравнениях пропорциональны, то есть существует такое число \(\lambda\), что
$$
A_ <1>= \lambda A,\ B_ <1>= \lambda B.\label
$$
Прямые совпадают в том и только том случае, когда их уравнения пропорциональны, то есть помимо уравнения \eqref
$$
C_ <1>= \lambda C.\label
$$
Первая часть предложения прямо следует из того, что векторы с компонентами \((-B, A)\) и \((-B_<1>, A_<1>)\) — направляющие векторы прямых.
Докажем вторую часть. В равенствах \eqref
Обратно, пусть прямые параллельны. В силу первой части предложения их уравнения должны иметь вид \(Ax+By+C = 0\) и \(\lambda(Ax+By)+C_ <1>= 0\) при некотором \(\lambda\). Если, кроме того, существует общая точка \(M_<0>(x_<0>, y_<0>)\) обеих прямых, то \(Ax_<0>+By_<0>+C = 0\) и \(\lambda(Ax_<0>+By_<0>)+C_ <1>= 0\). Вычитая одно равенство из другого, получаем \(C_ <1>= \lambda C\), как и требовалось.
Плоскости, задаваемые в общей декартовой системе координат уравнениями
$$
Ax+By+Cz+D = 0,\ A_<1>x+B_<1>y+C_<1>z+D_ <1>= 0\nonumber
$$
параллельны тогда и только тогда, когда соответствующие коэффициенты в их уравнениях пропорциональны, то есть существует такое число \(\lambda\), что
$$
A_ <1>= \lambda A,\ B_ <1>= \lambda B,\ C_ <1>= \lambda C.\label
$$
Плоскости совпадают в том и только том случае, когда их уравнения пропорциональны, то есть помимо уравнений \eqref
$$
D_ <1>= \lambda D.\label
$$
Если плоскости параллельны, то их нормальные векторы \(\boldsymbol
Условия \eqref
$$
\begin
A& B\\
A_<1>& B_<1>
\end
= 0,\label
$$
а условие параллельности плоскостей — в виде
$$
\begin
B& C\\
B_<1>& C_<1>
\end
\begin
C& A\\
C_<1>& A_<1>
\end
\begin
A& B\\
A_<1>& B_<1>
\end
= 0.\label
$$
Утверждению 7 можно придать чисто алгебраическую формулировку, если учесть, что координаты точки пересечения прямых — это решение системы, составленной из их уравнений.
При условии \eqref
$$
Ax+By+C = 0,\ A_<1>x+B_<1>y+C_ <1>= 0,\nonumber
$$
не имеет решений или имеет бесконечно много решений (в зависимости от \(C\) и \(C_<1>\). В последнем случае система равносильна одному из составляющих ее уравнений. Если же
$$
\begin
A& B\\
A_<1>& B_<1>
\end
\neq 0.\nonumber
$$
то при любых \(C\) и \(C_<1>\) система имеет единственное решение \((x, y)\).
Уравнения прямой в пространстве.
Прямая линия в пространстве может быть задана как пересечение двух плоскостей и, следовательно, в общей декартовой системе координат определяется системой уравнений вида
$$
\left\<\begin
Ax+By+Cz+D = 0,\\
A_<1>x+B_<1>y+C_<1>z+D_ <1>= 0.
\end
$$
Пересечение плоскостей — прямая линия тогда и только тогда, когда они не параллельны, что согласно \eqref
$$
\begin
B& C\\
B_<1>& C_<1>
\end
\begin
C& A\\
C_<1>& A_<1>
\end
\begin
A& B\\
A_<1>& B_<1>
\end
\neq 0.\label
$$
Разумеется, систему \eqref
Вспомним параметрические уравнения прямой \eqref
$$
t = \frac
$$
и мы получаем два равенства
$$
\frac
$$
или, в более симметричном виде,
$$
\frac
$$
Уравнения \eqref
Если обращается в нуль одна из компонент направляющего вектора, например, \(\alpha_<1>\), то уравнения прямой принимают вид
$$
x = x_<0>,\ \frac
$$
Эта прямая лежит в плоскости \(x = x_<0>\) и, следовательно, параллельна плоскости \(x = 0\). Аналогично пишутся уравнения прямой, если в нуль обращается не \(\alpha_<1>\), а другая компонента.
Когда равны нулю две компоненты направляющего вектора, например, \(\alpha_<1>\) и \(\alpha_<2>\), то прямая имеет уравнения
$$
x = x_<0>,\ y = y_<0>.\label
$$
Такая прямая параллельна одной из осей координат, в нашем случае — оси аппликат.
Важно уметь находить начальную точку и направляющий вектор прямой, заданной системой линейных уравнений \eqref
Не будем доказывать этого, хотя это и не трудно сделать. Для ясности, заменяя \(z\) на \(t\), получаем параметрические уравнения прямой
$$
x = \alpha_<1>t+\beta_<1>,\ y = \alpha_<2>t+\beta_<2>,\ z = t.\nonumber
$$
Первые две координаты начальной точки прямой \(M_<0>(\beta_<1>, \beta_<2>, 0)\) можно получить, решая систему \eqref
Из параметрических уравнений видно, что в этом случае направляющий вектор имеет координаты \((\alpha_<1>, \alpha_<2>, 1)\). Найдем его компоненты в общем виде. Если система координат декартова прямоугольная, векторы с компонентами \((A, B, C)\) и \(A_<1>, B_<1>, C_<1>\) перпендикулярны соответствующим плоскостям, а потому их векторное произведение параллельно прямой \eqref
$$
\begin
B& C\\
B_<1>& C_<1>
\end
\begin
C& A\\
C_<1>& A_<1>
\end
\begin
A& B\\
A_<1>& B_<1>
\end
$$
Вектор с компонентами \eqref
Согласно утверждению 5 каждый ненулевой вектор, компоненты которого \((\alpha_<1>, \alpha_<2>, \alpha_<3>)\) удовлетворяют уравнению \(A\alpha_<1>+B\alpha_<2>+C\alpha_ <3>= 0\), параллелен плоскости с уравнением \(Ax+By+Cz+D = 0\). Если, кроме того, он удовлетворяет уравнению \(A_<1>\alpha_<1>+B_<1>\alpha_<2>+C_<1>\alpha_ <3>= 0\), то он параллелен и второй плоскости, то есть может быть принят за направляющий вектор прямой. Вектор с компонентами \eqref
Векторное поле. Векторные линии и их дифференциальные уравнения







По этой ссылке вы найдёте полный курс лекций по математике:
Определение. Если в каждой точке M(x,y,z) пространства или части пространства определена векторная величина то говорят, что там задано векторное поле а. Задание векторного поля равносильно заданию ipex скалярных функций от трех переменных , Примерами векторных полей могут служить: силовое поле — поле некоторой силы F, поле скоростей v течения некоторой жидкости и др.
Для геометрической характеристики векторного поля служат векторные линии. Векторной линией векторного поля а называется кривая, касательная к которой в любой точке М имеет то же направление, что и вектор поля а в этой точке (рис. 7). В силовом поле векторные линии называются силовыми линиями’, в поле скоростей дви-женияжидкости векторные линии называются линиями тока. Рис. 7 3.1.
Дифференциальные уравнения векторных линий Пусть векторное поле определяется вектор-функцией ) — непрерывные функции переменных x, у, z, имеющие ограниченные частные производные первого порядка. Пусть — есть радиус-вектор текущей точки векторной линии векторного поля a (t — параметр). Из определения векторной линии следует, что вектор и вектор касательной к этой кривой должны быть коллинеарны в каждой точке векторной линии. Условием коллинеарности векторов является пропорциональность их координат:
Векторное поле Векторные линии и их дифференциальные уравнения Дифференциальные уравнения векторных линий Поток вектора через поверхность и его свойства Свойства потока вектора через поверхность Понятие ориентации поверхности Таким образом, мы получили для векторных линий систему дифференциальных уравнений в симметричной форме. Допустим, что нам удалось найти два независимых интеграла системы (2): . Система уравнений (3) определяет векторную линию как линию пересечения двух поверхностей. Произвольно меняя параметры с, и Сг, мы получаем семейство векторных линий как семейство с двумя степенями свободы.
Пример 1. Найти векторные линии векторного поля 4 Выписываем дифференциальные уравнения векторных линий, или Интегрируя эту систему, получим два уравнения — произвольные постоянные. Пересечение плоскостей у — С\х с параболическими цилиндрами дает двух параметрическое семейство векторных линий поля (рис.8). Олредрм*т . Векторное поле называется плоским, если все векторы а параллельны одной и той же плоскости и в каждой плоскости, параллельной указан ной, векторное поле одно и то же.
Посмотрим, как плоское векторное поле описывается в координатах.
Если указанную в определении плоскость (или любую ей параллельную) принять за плоскость хОу, то векторы плоского поля не будут содержать компоненты по оси Oz и координаты векторов не будут зависеть от z: Дифференциальные уравнения векторныхл иний плоского поля можно записать в следующем виде Отсюда видно, что векторные линии плоского поля являются плоскими кривыми, лежащими в плоскостях, параллельных плоскости хОу.
Возможно вам будут полезны данные страницы:
Пример 2. Найти векторные линии магнитного поля бесконечно длинного прямого провода. ^ Предположим, что проводник направлен вдоль оси Oz и по нему течет ток силы J, т.е. вектор тока Тогда вектор напряженности Н магнитного поля определяется по формуле — радиус-вектор точхи М, р — расстояние от оси провода до точки М. Раскрывая векторное произведение (6), получим Дифференциальные уравнения векторных линий: Отсюда х = const, = или . Окончательно имеем т.е. векторные линии являются офужносгями с центрами на оси О г (рис.9). Пример 3.
Найти векторные линии поля сил тяготения, образованного притягивающей материальной то*«ой массы ш, расположенной в начале координат. Дифференциальные уравнения векторных линий: стсуда, умножая каждую из дробей на , получим Чтобы получить уравнения векторных линий в параметрической форме, приравняем каждую из дробей величине у. Имеем Это — полупрямые, выходящие из начала координат. Чтобы из семейства векторных линий выделить одну, надо задать точку ), через которую эта векторная линия должна проходить, и по координатам заданной точки определить величины.
Пусть, например, точка А/о имеет координаты . Уравнение векторной линии, проходящей через точку, можно записать так: . Сама точка Л/о получается при значении параметра § 4. Поток вектора через поверхность и его свойства Рассмотрим сначала частный случай поля скоростей v течения жидкости. Выделим в поле некоторую поверхность Потоком жидкости через поверхность Е называется количество жидкости, протекающее через поверхность Е за единицу времени.
| Этот поток легко вычислить |
если скорость течения постоянна (v = const), а поверхность £ —плоская. В этом случае поток жидкости равен объему цилиндрического тела с параллельными основаниями и образующими длины |v|, так как за единицу времени кажд ая частица перемещается на величину v (рис. 10), где S — площадь основания, — высота цилиндра и n — нормаль к его основанию, Итак, при постоянной скорости v поток жидкости через плоскую поверхность Е равен Если скорость v изменяется непрерывно, а поверхность Е — гладкая, то можно разбить поверхность Е на столь малые части , чтобы каждую часть Е* можно было приближенно считать плоской и вектор v на ней постоянным.
Так как поток жидкости через поверхность Е равен сумме потоков жидкости через все ее части Е*, то мы получаем для вычисления потока приближенную формулу Векторное поле Векторные линии и их дифференциальные уравнения Дифференциальные уравнения векторных линий Поток вектора через поверхность и его свойства Свойства потока вектора через поверхность Понятие ориентации поверхности где п — общее число частей Efc, на которые разбита поверхность Е, Рк — точка, лежащая на fc-ой части, Аак — площадь части Е* поверхности, означает скалярное произведение векторов в точке *(рис. 11).
Назовем потоком жидкости через поверхность Е предел суммы (2) при стремлении к нулю наибольшего из . диаметров площадок Е*, где d — наибольший из диаметров частей . Интеграл (3), определяющий поток жидкости, берется от скалярной функции (v, п°) по площади поверхности Е. Понятие потока произвольного вектора а через поверхность Е вводится по аналогии с введенным выше понятием потока жидкости через поверхность. Определение.
Тогда вектор напряженности поля в любой точке Р будет равен где ч — величина заряда (массы), г ОР — радиус-вектор точки Р. Требуется найти поток вектора напряженности Е через Sn — сферу радиуса R с центром в начале координат. Так как направление нормали к сфере совпадает с направлением радиус-вектора г, и поэтому На сфере 5д радиуса R имеем . Поэтому поток вектора чероз Sn равен 4.1. Свойства потока вектора через поверхность 1. Линейность. где А и ц — постоянные числа. 2. Аддитивность. Если поверхность Е разбита кусочно-гладкой кривой на две части , то поток через поверхность Е равен сумме потоков через поверхности Ei и Е2, Это свойство позволяет распространить понятие потока на кусочно-гладкие поверхности Е.
Понятие ориентации поверхности Взяв, к примеру, цилиндрическую поверхность, замечаем, что если в некоторой ее точке М выбрать определенный (один из двух) единичный вектор нормали и непрерывно перемещаться затем по поверхности вместе с соответствующим вектором нормали по любому пути, не переходящему через край поверхности, то при возвращении в точку М единичный вектор нормали совпадает с исходным (рис. 12). Вместе с тем, существуют поверхности, для которых это не так.
Примером такой поверхности может служить лист Мёбиуса (рис. 13). Существует путь (отмеченная на рисунке пунктиром средняя линия листа), перемещаясь по которому, мы возвратимся в начальную точку с единичным вектором нормали, противоположным исходному. Описанное свойство разбивает все поверхности на два класса — двусторонние, или ориентируемые (плоскость, сфера, поверхность куба и т. п.), и односторонние, или неориентируемые (лист Мёбиуса). 3. Зависимость потока от ориентации поверхности (от ориентации вектора нормали к поверхности). Понятие потока вводится только для двусторонних поверхностей.
Будем считать, что если в одной точке такой поверхности направление вектора нормали уже выбрано, то Рис. 13 в любой другой ее точке берется тот вектор нормали, который получается из выбранного при непрерывном перемещении точки по поверхности (без перехода через границу). В частности, на замкнутой поверхности во всех точках берется либо внешняя нормаль, либо внутренняя (внутренняя нормаль направлена внутрьтела, ограниченного замкнутой поверхностью).
Обозначим через ту сторону поверхности £, на которой выбран вектор нормали п+ = п, а через Е
— сторону поверхности Е, на которой берется вектор нормали (п_ = -п). Тогда получим (7) где . Таким образом, при изменении ориентации поверхности (при изменении направления вектора нормали п° к поверхности Е) поток вектора меняет знак на противоположный.
Пример 2. Вычислить поток радиус-вектора через поверхность прямого кругового цилиндра высоты Н с радиусом основания R и осью Ог. Поверхность состоит из трех частей: боковой поверхности £j, верхнего основания £2 и нижнего основания £3 цилиндра. Искомый поток П в силу свойства аддитивности равен — потоки данного поля через и соответственно. На боковой поверхности цилиндра вектор внешней нормали п? параллелен плоскости хОу, и поэтому (см. рис. 14).
Следовательно, Векторное поле Векторные линии и их дифференциальные уравнения Дифференциальные уравнения векторных линий Поток вектора через поверхность и его свойства Свойства потока вектора через поверхность Понятие ориентации поверхности На верхнем основании £2 вектор нормали параллелен оси Oz, и поэтому можно положить п§ = к-Тогда имеем так что На нижнем основании вектор г перпендикулярен к вектору нормали п» = -к. Поэтому Здесь символ означает двойной интеграл по замкнутой поверхности,
Присылайте задания в любое время дня и ночи в ➔ 

Официальный сайт Брильёновой Натальи Валерьевны преподавателя кафедры информатики и электроники Екатеринбургского государственного института.
Все авторские права на размещённые материалы сохранены за правообладателями этих материалов. Любое коммерческое и/или иное использование кроме предварительного ознакомления материалов сайта natalibrilenova.ru запрещено. Публикация и распространение размещённых материалов не преследует за собой коммерческой и/или любой другой выгоды.
Сайт предназначен для облегчения образовательного путешествия студентам очникам и заочникам по вопросам обучения . Наталья Брильёнова не предлагает и не оказывает товары и услуги.
http://univerlib.com/analytic_geometry/vector_algebra/lines_and_planes_equations/
http://natalibrilenova.ru/vektornoe-pole-vektornyie-linii-i-ih-differentsialnyie-uravneniya-/