Векторный и координатный методы решения задач

Векторный и координатный методы решения задач
Векторный и координатный методы решения задач – очень популярный и эффективный метод в геометрии и не только. Однако его формальное применение может значительно затруднить решение даже самой простой задачи. Поэтому в данной статье мы рассмотрим эффективные приемы использования указанных методов и примеры решения задач. Для удобства работы в статье приводятся важнейшие определения и формулы. Однако более детальное и подробное изложение материала читатель без труда найдет в школьном учебнике по геометрии[1] для 8-9 класса.
Как обычно, в конце статьи приводятся задачи для самостоятельного решения, которые составляют первую контрольную работу по математике для слушателей ХКЗФМШ, обучающихся в 9 классе.
§1. Некоторые определения и вычислительные формулы[2]
 П.1 Координаты точки на плоскости
П.1 Координаты точки на плоскости
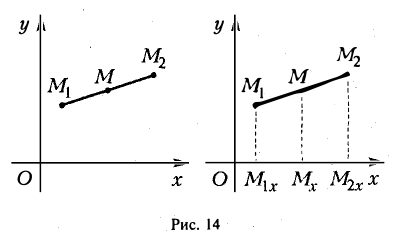
Существует два способа определять координаты точек. С первым вы познакомились еще в 5 классе, изучая координаты точки на числовой оси. Напомним, как тогда вводились координаты.
 На плоскости строили две координатные прямые (оси ОХ и ОУ). Произвольная точка М проектировалась на каждую ось (в точки Мх и Му). Затем находились координаты проекций (х и у) на соответствующих числовых осях. Пара этих координат и называлась координатами точки на плоскости. Такой метод очень удобен в том случае, когда нужно найти координаты построенной точки, или наоборот, по известным координатам нужно построить точку. Однако он не позволяет[3] получать уравнения различных фигур на плоскости, проводить общие исследования их свойств.
На плоскости строили две координатные прямые (оси ОХ и ОУ). Произвольная точка М проектировалась на каждую ось (в точки Мх и Му). Затем находились координаты проекций (х и у) на соответствующих числовых осях. Пара этих координат и называлась координатами точки на плоскости. Такой метод очень удобен в том случае, когда нужно найти координаты построенной точки, или наоборот, по известным координатам нужно построить точку. Однако он не позволяет[3] получать уравнения различных фигур на плоскости, проводить общие исследования их свойств.
 Здесь нам на помощь приходит второй подход к определению координат, основанный на понятии координат радиус-вектора точки. Он основан на том факте, что любой вектор на плоскости единственным образом раскладывается по двум неколлинеарным векторам. Точнее, если
Здесь нам на помощь приходит второй подход к определению координат, основанный на понятии координат радиус-вектора точки. Он основан на том факте, что любой вектор на плоскости единственным образом раскладывается по двум неколлинеарным векторам. Точнее, если  и
и  — два неколлинеарных вектора, а
— два неколлинеарных вектора, а  — произвольный вектор на плоскости, то всегда найдется единственная пара чисел (х, у), такая, что
— произвольный вектор на плоскости, то всегда найдется единственная пара чисел (х, у), такая, что  .
.
 Теперь для определения координат точки поступим следующим образом. Выберем два неколлинеарных вектора
Теперь для определения координат точки поступим следующим образом. Выберем два неколлинеарных вектора  , (будем называть их базисными), и точку О – начало координат. Начало координат и базисные векторы определяют на плоскости некоторую систему координат. Пусть М – произвольная точка на плоскости. Вектор
, (будем называть их базисными), и точку О – начало координат. Начало координат и базисные векторы определяют на плоскости некоторую систему координат. Пусть М – произвольная точка на плоскости. Вектор  будем называть радиус – вектором точки М. По указанному выше свойству, найдутся такие два числа хМ и уМ, что
будем называть радиус – вектором точки М. По указанному выше свойству, найдутся такие два числа хМ и уМ, что  . Эту пару (хМ, уМ) мы и будем называть координатами точки М в системе координат
. Эту пару (хМ, уМ) мы и будем называть координатами точки М в системе координат  >.
>.
На первый взгляд, такой подход может показаться не совсем удобным (Как координаты находить, как точку строить?), но он позволяет в дальнейших исследованиях применять векторную алгебру. Эффективность этого метода мы увидим уже в следующем пункте.
П.2. Деление отрезка в данном отношении
В учебнике предложена следующая задача.
Задача 1. На прямой М1М2 лежит точка М, такая, что  . О – произвольная точка плоскости. Докажите, что
. О – произвольная точка плоскости. Докажите, что
Мы не будем решать здесь эту задачу, тем более, что ее решение приведено в учебнике. Нас будет интересовать формула (1).
Дадим определение. Будем говорить, что точка М, лежащая на прямой М1М2 делит отрезок М1М2 в отношении l, если выполнено условие.
Задача 2. Пусть в некоторой системе координат известны координаты точек М1(х1,у1) и М2(х2,у2). Зная, чему равно число l, нужно вычислить координаты точки М(х, у).
Решение. Используем второе определение координат. Пусть О – начало координат. Тогда для радиус-векторов точек М1 , М2 и М выполнено соотношение (1) из предыдущей задачи. Заметим, что радиус-векторы точек имеют те же координаты, что и сами точки. Поэтому, переписав формулу (1) в координатной форме, получим следующие выражения:
 . (2)
. (2)
Замечание. Как видно, использование свойств векторов дало нам быстрое решение для данной задачи. Попробуйте получить аналогичную формулу, используя первое определение координат точки.
Мы вернемся к рассмотрению координат точек несколько позже, а в следующем пункте приведем сводку основных свойств и формул, относящихся к векторам.
П.3. Некоторые свойства векторов
3.1. Коллинеарность векторов
Два вектора называют коллинеарными, если они лежат на одной прямой или на параллельных прямых (обозначение:  ). Есть два признака коллинеарности.
). Есть два признака коллинеарности.
Первый признак: , тогда и только тогда, когда существует такое число l, что  . Используют в общем случае.
. Используют в общем случае.
Если известны координаты векторов, то удобно использовать следующий признак.
Второй признак: тогда и только тогда, когда их координаты пропорциональны:
 , (3)
, (3)
3.2. Вычисление координат вектора по координатам его начала и конца.
Если известны координаты начала и конца вектора, то координаты самого вектора можно вычислить по формуле:
 , (4)
, (4)
где  — координаты точки А, а
— координаты точки А, а  — координаты точки В.
— координаты точки В.
Замечание. Вывод этой формулы легко получить, используя векторное определение координат точки. Вектор  можно представить как разность радиус-векторов его конца и начала:
можно представить как разность радиус-векторов его конца и начала:
 .
.
3.3. Вычисление длины вектора и длины отрезка.
Длина вектора, координаты которого в прямоугольной системе координат равны  , вычисляется по формуле:
, вычисляется по формуле:
 . (5)
. (5)
Используя эту формулу и формулу (4), можно получить следующую формулу для вычисления длины отрезка:
 . (6)
. (6)
3.4. Скалярное произведение векторов в прямоугольной системе координат.
Скалярным произведением двух векторов называют число, которое равно произведению длин этих векторов на косинус угла между ними:
 . (7)
. (7)
Если известны координаты векторов  , то их скалярное произведение можно вычислить по формуле:
, то их скалярное произведение можно вычислить по формуле:
 . (8)
. (8)
3.5. Признак перпендикулярности векторов.
Если два вектора перпендикулярны, то косинус угла между ними равен нулю. Поэтому скалярное произведение этих векторов равно нулю. Из этого рассуждения мы получаем следующий признак: два ненулевых вектора перпендикулярны тогда и только тогда, когда их скалярное произведение равно нулю.
Замечание. Если  — ненулевой вектор, то вектор
— ненулевой вектор, то вектор  перпендикулярен ему и имеет такую же длину. (Проверьте это с помощью формул (8) и (5)).
перпендикулярен ему и имеет такую же длину. (Проверьте это с помощью формул (8) и (5)).
3.6. Вычисление угла между векторами.
Пользуясь формулой скалярного произведения, мы можем выразить косинус угла между векторами:
 . (9)
. (9)
В координатной записи эта формула будет выглядеть так:
 . (10)
. (10)
3.7. Вычисление площади параллелограмма, построенного на двух векторах.
Если два вектора заданы своими координатами , то площадь параллелограмма, построенного на этих векторах можно найти по формуле:
 . (11)
. (11)
Получить ее можно, если вычислить скалярное произведение вектора на вектор  . С одной стороны будет стоять произведение длин векторов
. С одной стороны будет стоять произведение длин векторов  и
и  на синус угла между ними (так как вектор
на синус угла между ними (так как вектор  повернут к вектору на 90 градусов), а с другой стороны – выражение, стоящее в формуле (11) под знаком модуля.
повернут к вектору на 90 градусов), а с другой стороны – выражение, стоящее в формуле (11) под знаком модуля.
П.4. Уравнения прямой и отрезка
В этом пункте мы продемонстрируем преимущества векторного подхода к определению координат точки.
4.1. Параметрические уравнения прямой.
Пусть нам известны координаты точки М0(х0,у0), принадлежащей некоторой прямой а, и координаты вектора , который параллелен[4] этой прямой. Необходимо составить уравнения, которым удовлетворяют координаты всех точек этой прямой.
Предположим, что точка М(х, у) принадлежит прямой а. Очевидно, что тогда векторы и  с коллениарны. Применив к ним первый признак, получим векторное равенство:
с коллениарны. Применив к ним первый признак, получим векторное равенство:
 .
.
Переписав его в координатном виде, и перенеся в правую часть координаты точки М0, получим следующие уравнения:
 (12)
(12)
которые принято называть параметрическими уравнениями прямой. Придавая в этих уравнениях параметру t любые действительные значения, мы можем получить координаты всех точек, лежащих на прямой.
4.2. Канонические уравнения прямой.
Если в уравнениях (12) исключить параметр t, то мы получим уравнение:
 , (13)
, (13)
которое принято называть каноническим. Подставляя в это уравнение координаты произвольной точки, мы можем выяснить, принадлежит ли она данной прямой.
4.3. Общее уравнение прямой.
Избавляясь от знаменателей в уравнении (13), мы приведем его к виду:
 , (14)
, (14)
где a и b не равны нулю одновременно, которое называют общим уравнением прямой. Любая прямая может быть задана таким уравнением.
4.4. График линейной функции –прямая на плоскости.
Из курса алгебры вам известна линейная функция. Она задается уравнением:
 . (15)
. (15)
Нетрудно заметить, что это частный случай общего уравнения (14) прямой. Для нас важное значение имеет коэффициент k в этом уравнении. Превратим уравнение (15) в параметрические уравнения прямой, положив x=t. Мы получим следующие выражения:

Применив к ним пункт 4.1., найдем координаты направляющего вектора:  . Заметим, что в прямоугольной системе координат для любого вектора отношение второй его координаты к первой равно тангенсу угла, который данный вектор составляет с координатной осью ОХ. В нашем случае этот тангенс равен коэффициенту k.
. Заметим, что в прямоугольной системе координат для любого вектора отношение второй его координаты к первой равно тангенсу угла, который данный вектор составляет с координатной осью ОХ. В нашем случае этот тангенс равен коэффициенту k.
4.5. Условие перпендикулярности двух прямых, заданных как графики линейных функций.
Пусть прямая l задана уравнением  , а прямая m задана уравнением
, а прямая m задана уравнением  . Координаты направляющих векторов этих прямых равны соответственно
. Координаты направляющих векторов этих прямых равны соответственно  и
и  . Прямые будут перпендикулярны, если перпендикулярны их направляющие векторы, те, в свою очередь, перпендикулярны, если их скалярное произведение
. Прямые будут перпендикулярны, если перпендикулярны их направляющие векторы, те, в свою очередь, перпендикулярны, если их скалярное произведение  . Отсюда получаем признак перпендикулярности прямых:
. Отсюда получаем признак перпендикулярности прямых:
 . (16)
. (16)
П.6. Уравнение окружности
По определению, окружность представляет из себя множество точек плоскости, удаленных от данной точки О (центра окружности) на одинаковое расстояние R (радиус окружности). Получим уравнение окружности, считая, что ее центр – точка О(х0,у0), а радиус равен R.
Пусть М(х, у) – произвольная точка окружности. По формуле (6) выразим расстояние от М до центра окружности:
 .
.
Возведем теперь левую и правую части в квадрат, и, учитывая, что МО=R, получим уравнение окружности:
 . (17)
. (17)
Замечание. В некоторых задачах мы можем получить уравнение второй степени с двумя неизвестными, имеющее вид:
 . (18)
. (18)
Выделив в нем полные квадраты относительно x и y, мы получим уравнение:
 . (19)
. (19)
Если правая часть этого уравнения положительна, то это есть уравнение окружности с центром  и радиусом
и радиусом  . Заметим также, что если правая часть уравнения (19) отрицательна, то оно не имеет решения, а если она равна нулю, то существует только одно решение
. Заметим также, что если правая часть уравнения (19) отрицательна, то оно не имеет решения, а если она равна нулю, то существует только одно решение  .
.

§ 2. Примеры решения задач
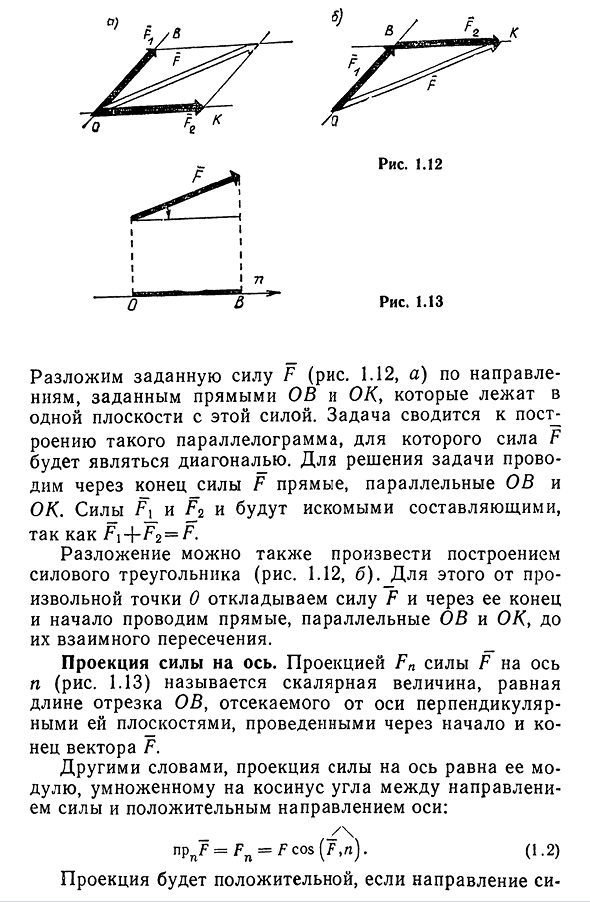
Задача 1. Дана прямоугольная трапеция с основаниями a и b. Найдите расстояние между серединами ее диагоналей.
 Решение. 1. Введем систему координат как указано на рисунке 3. Тогда вершины трапеции будут иметь координаты: A(0,0), B(0,y), C(b,y) и D(a,0). (Здесь y – высота трапеции).
Решение. 1. Введем систему координат как указано на рисунке 3. Тогда вершины трапеции будут иметь координаты: A(0,0), B(0,y), C(b,y) и D(a,0). (Здесь y – высота трапеции).
 2. Найдем координаты середин диагоналей, используя формулу (2), и учитывая, что середина делит отрезок в отношении l=1. Для точки О:
2. Найдем координаты середин диагоналей, используя формулу (2), и учитывая, что середина делит отрезок в отношении l=1. Для точки О:  . Для точки О1:
. Для точки О1:  . По формуле (6) найдем расстояние между точками О и О1:
. По формуле (6) найдем расстояние между точками О и О1:
 .
.
Ответ:  .
.
Замечание. Мы вводили в рассмотрение неизвестную нам высоту трапеции y. Но на этапе вычислений она сократилась.

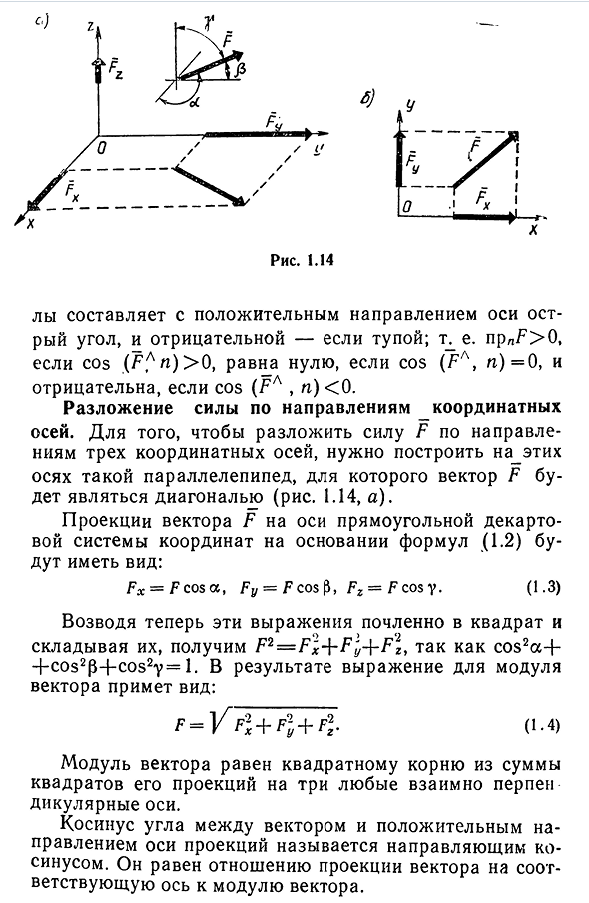
Задача 2. Медиана, проведенная к основанию равнобедренного треугольника, равна 160 см, а основание треугольника равно 80 см. Найдите две другие медианы этого треугольника.
Решение. 1. Введем прямоугольную систему координат так, как показано на рисунке 4. В этой системе вершины треугольника будут иметь координаты: А(-40,0), В(0, 160), С(40,0), а точка М2(0,0). Используя, как и в предыдущей задаче, формулы(2), найдем координаты середин двух других сторон. Для М3 получим: . Для М1 аналогично находим:
. Для М1 аналогично находим:  .
.
2. Вычислим длины отрезков АМ1 и СМ3, используя формулу (6). Для АМ1 получим:
 .
.
 Длина второй медианы вычисляется аналогично.
Длина второй медианы вычисляется аналогично.
Ответ:  .
.
Задача 3. В прямоугольном равнобедренном треугольнике проведены медианы острых углов. Вычислите косинус угла между ними.
Решение. 1. Введем систему координат так, как показано на рисунке 5. В этом случае Вершины треугольника будут иметь координаты: С(0,0), А(а,0), В(0,а), а середины катетов:  . (Здесь а – длина катета.)
. (Здесь а – длина катета.)
 2. По формуле (4) вычислим координаты векторов
2. По формуле (4) вычислим координаты векторов  и
и  .
.
 3. Теперь используем формулу (10) для вычисления косинуса угла между векторами. (Этот угол совпадает с углом между медианами.)
3. Теперь используем формулу (10) для вычисления косинуса угла между векторами. (Этот угол совпадает с углом между медианами.)
 .
.
Ответ:  .
.
Задача 4. Дан ромб АВСD, диагонали которого равны 2а и 2b. Найдите множество всех точек М, для каждой из которых выполняется условие: AM2+DM2=BM2+CM2.
 Решение. 1. Введем систему координат, взяв за ее начало центр ромба, а за оси – его диагонали. В этой системе вершины имеют координаты: A(—a;0), B(0;b), C(a;0) и D(0;—b).
Решение. 1. Введем систему координат, взяв за ее начало центр ромба, а за оси – его диагонали. В этой системе вершины имеют координаты: A(—a;0), B(0;b), C(a;0) и D(0;—b).
2. Считая, что точка М имеет координаты (х;у), запишем условие AM2+DM2=BM2+CM2 в координатной форме. Для этого используем формулу (6) при вычислении длин отрезков. Получим следующее выражение:
 .
.
Раскрывая скобки и приводя подобные, получим следующее уравнение:
 , или:
, или:  (*).
(*).
В пункте 4.3 первого параграфа мы уже встречали такое уравнение – это общее уравнение прямой. И так, мы установили, что интересующее нас множество точек – это прямая линия. Попробуем теперь определить ее расположение относительно ромба.
 3. Нетрудно заметить, что сторона АВ ромба может быть задана уравнением[5]
3. Нетрудно заметить, что сторона АВ ромба может быть задана уравнением[5]  . Перепишем его в виде
. Перепишем его в виде  , а уравнение (*) в виде
, а уравнение (*) в виде  . Угловые коэффициенты в этих уравнениях в произведении дают -1. Это значит, что для данных прямых выполняется признак (16) перпендикулярности. Кроме того, очевидно, что полученная выше прямая проходит через начало координат – оно же – центр ромба. Таким образом, условию задачи удовлетворяют все точки, лежащие на прямой, проходящей через центр ромба и перпендикулярной прямой АВ.
. Угловые коэффициенты в этих уравнениях в произведении дают -1. Это значит, что для данных прямых выполняется признак (16) перпендикулярности. Кроме того, очевидно, что полученная выше прямая проходит через начало координат – оно же – центр ромба. Таким образом, условию задачи удовлетворяют все точки, лежащие на прямой, проходящей через центр ромба и перпендикулярной прямой АВ.
Задача 5. Найти геометрическое место точек, сумма квадратов расстояний от которых до двух данных точек есть величина постоянная.
Решение. 1. Введем прямоугольную систему координат как показано на чертеже. Тогда, считая, что длина отрезка равна b, получим следующие координаты точек А и В: А(0;0), В(b;0).
2. Пусть М(х;у) – произвольная точка плоскости, удовлетворяющая условию задачи: |AM|2+|BM|2=с2. Тогда:


 В случае, когда правая часть последнего равенства положительна, мы получаем окружность, центр которой лежит на середине отрезка АВ. Если правая часть равна нулю, то решением будет единственная точка – середина АВ. Если правая часть отрицательна, то задача не имеет решений.
В случае, когда правая часть последнего равенства положительна, мы получаем окружность, центр которой лежит на середине отрезка АВ. Если правая часть равна нулю, то решением будет единственная точка – середина АВ. Если правая часть отрицательна, то задача не имеет решений.
Задача 6. Дана окружность радиуса r. Через одну из ее точек (точку А) проведены всевозможные хорды. Найти геометрическое место точек, делящих эти хорды пополам.
Решение. 1. Введем прямоугольную систему координат так, чтобы ее центр совпал с центром окружности, а ось ОУ прошла через точку А. Уравнение окружности будет иметь вид:  (**).
(**).
У точки А координаты (0;r).
2. Далее, пусть  – второй конец хорды. Координаты середины хорды (точки М(х;у)) найдем по известной формуле (см., например, задачу 2):
– второй конец хорды. Координаты середины хорды (точки М(х;у)) найдем по известной формуле (см., например, задачу 2):

 .
.
Выразим из них координаты точки В:  . Эти координаты должны удовлетворять уравнению окружности. Подставим их в это уравнение. Получаем:
. Эти координаты должны удовлетворять уравнению окружности. Подставим их в это уравнение. Получаем:

Раскрыв скобки, сократив уравнение на 4 и проведя группировку, получим следующее выражение:  . Это уравнение окружности, центр которой лежит на середине радиуса, проведенного в точку А, а радиус полученной окружности в два раза меньше радиуса данной.
. Это уравнение окружности, центр которой лежит на середине радиуса, проведенного в точку А, а радиус полученной окружности в два раза меньше радиуса данной.
Представленные ниже задачи являются контрольным заданием для учащихся 10 класса. Решения необходимо оформить в отдельной тетради и выслать по адресу 680000, 8, ХКЦТТ, ХКЗФМШ. Для зачета нужно набрать не менее 30 баллов, каждая задача оценивается максимум в 10 баллов.
М 10.1.1. Даны координаты вершин четырехугольника ABCD: A(-6;1), B(0;5), C(6;-4),D(0,-8). Докажите, что это прямоугольник и найдите координаты точки пересечения его диагоналей.
М 10.1.2. Окружность задана уравнением  . Составьте уравнения прямых, проходящих через центр этой окружности и параллельных координатным осям. Найдите также уравнение касательной к окружности, параллельной оси ОХ, и наиболее близко расположенной к началу координат. Обоснуйте свои действия.
. Составьте уравнения прямых, проходящих через центр этой окружности и параллельных координатным осям. Найдите также уравнение касательной к окружности, параллельной оси ОХ, и наиболее близко расположенной к началу координат. Обоснуйте свои действия.
М 10.1.3. Найдите длину средней линии треугольника, параллельной стороне АВ, если координаты вершин таковы: A(-3;-6), B(-8;6), C(4;-10).
М 10.1.4. Высота AD треугольника АВС делит сторону ВС на отрезки BD=10 см и CD=4 см. Введите удобную систему координат и определите координаты вершин этого треугольника, если угол при вершине В равен 45 градусов. Объясните, почему выбранная система – наиболее удобная.
М 10.1.5. Определите геометрическое место точек плоскости, удовлетворяющих следующему условию: расстояния от каждой из этих точек до концов данного отрезка относятся как 2:3.
М 10.1.6. найдите уравнение прямой, проходящей через точку А(2;4) и перпендикулярной прямой, заданной уравнением  . Определите, в каких точках эта прямая пересекает координатные оси.
. Определите, в каких точках эта прямая пересекает координатные оси.
М 10.1.7. Составьте параметрические, каноническое и общее уравнения прямой, проходящей через середину отрезка АВ, и пересекающей отрезок АС в точке М, так, что АМ=3МС. Если А(8;0), В(-4; 8) и С(12;16).
[1] Например, в учебнике «Геометрия 8-9» авторов и др. материал по темам «Векторы» и «Метод координат» расположен в главах 9, 10 и §3 главы 11.
[2] Большое количество различных формул и примеров по данной теме приведено в статье , опубликованной во втором номере журнала МИФ-2 за 1999 год.
[3] Это конечно можно сделать, но тогда каждое уравнение придется получать специально придуманным методом.
[4] Такой вектор принято называть направляющим.
[5] Самостоятельно найдите координаты вектора и составьте каноническое уравнение этой прямой, используя формулу (13).
Уравнения прямых и плоскостей
Поверхности и линии первого порядка.
Уравнение первой степени, или линейное уравнение, связывающее координаты точки в пространстве, имеет вид
$$
Ax+By+Cz+D = 0,\label
$$
причем предполагается, что коэффициенты при переменных не равны нулю одновременно, то есть \(A^<2>+B^<2>+C^ <2>\neq 0\). Аналогично, линейное уравнение, связывающее координаты точки на плоскости, — это уравнение
$$
Ax+By+C = 0,\label
$$
при условии \(A^<2>+B^ <2>\neq 0\).
В школьном курсе доказывается, что в декартовой прямоугольной системе координат уравнения \eqref
В общей декартовой системе координат в пространстве каждая плоскость может быть задана линейным уравнением
$$
Ax+By+Cz+D = 0.\nonumber
$$
Обратно, каждое линейное уравнение в общей декартовой системе координат определяет плоскость.
В общей декартовой системе координат на плоскости каждая прямая может быть задана линейным уравнением
$$
Ax+By+C = 0,\nonumber
$$
Обратно, каждое линейное уравнение в общей декартовой системе координат на плоскости определяет прямую.
Эти теоремы полностью решают вопрос об уравнениях плоскости и прямой линии на плоскости. Однако ввиду важности этих уравнений мы рассмотрим их в других формах. При этом будут получены независимые доказательства теорем этого пункта.
Параметрические уравнения прямой и плоскости.
Мы будем предполагать, что задана декартова система координат в пространстве (или на плоскости, если мы изучаем прямую в планиметрии). Это, в частности, означает, что каждой точке сопоставлен ее радиус-вектор относительно начала координат.
 Рис. 6.1
Рис. 6.1
Вектор \(\overrightarrow
$$
\boldsymbol
$$
Наоборот, какое бы число мы ни подставили в формулу \eqref
Уравнение \eqref
Векторное параметрическое уравнение выглядит одинаково и в планиметрии, и в стереометрии, но при разложении по базису оно сводится к двум или трем скалярным уравнениям, смотря по тому, сколько векторов составляют базис.
Получим теперь параметрические уравнения плоскости. Обозначим через \(\boldsymbol
\) и \(\boldsymbol\) ее направляющие векторы, а через \(\boldsymbol
 Рис. 6.2
Рис. 6.2
Вектор \(\overrightarrow
\) и \(\boldsymbol\) не коллинеарны, в этом и только этом случае \(\boldsymbol
$$
\boldsymbol
+t_<2>\boldsymbol.\label
$$
Это уравнение называется параметрическим уравнением плоскости. Каждой точке плоскости оно сопоставляет значения двух параметров \(t_<1>\) и \(t_<2>\). Наоборот, какие бы числа мы ни подставили как значения \(t_<1>\) и \(t_<2>\), уравнение \eqref
Пусть \((x, y, z)\) и \((x_<0>, y_<0>, z_<0>)\) — координаты точек \(M\) и \(M_<0>\) соответственно, а векторы \(\boldsymbol
\) и \(\boldsymbol\) имеют компоненты \((p_<1>, p_<2>, p_<3>)\) и \((q_<1>, q_<2>, q_<3>)\). Тогда, раскладывая по базису обе части уравнения \eqref
$$
x-x_ <0>= t_<1>p_<1>+t_<2>q_<1>,\ y-y_ <0>= t_<1>p_<2>+t_<2>q_<2>,\ z-z_ <0>= t_<1>p_<3>+t_<2>q_<3>.\label
$$
Отметим, что начальная точка и направляющий вектор прямой образуют на ней ее внутреннюю декартову систему координат. Значение параметра \(t\), соответствующее какой-то точке, является координатой этой точки во внутренней системе координат. Точно так же на плоскости начальная точка и направляющие векторы составляют внутреннюю систему координат, а значения параметров, соответствующие точке, — это ее координаты в этой системе.
Прямая линия на плоскости.
Поэтому мы можем сформулировать следующее утверждение.
В любой декартовой системе координат на плоскости уравнение прямой с начальной точкой \(M_<0>(x_<0>, y_<0>)\) и направляющим вектором \(\boldsymbol(a_<1>, a_<2>)\) может быть записано в виде \eqref
Уравнение \eqref
Вектор с координатами \((-B, A)\) можно принять за направляющий вектор прямой с уравнением \eqref
Если система координат декартова прямоугольная, то вектор \(\boldsymbol
Действительно, в этом случае \((\boldsymbol, \boldsymbol
Пусть в уравнении прямой \(Ax+By+C = 0\) коэффициент \(B\) отличен от нуля. Это означает, что отлична от нуля первая компонента направляющего вектора, и прямая не параллельна оси ординат. В этом случае уравнение прямой можно представить в виде
$$
y = kx+b,\label
$$
где \(k = -A/B\), а \(b = -C/B\). Мы видим, что к равно отношению компонент направляющего вектора: \(k = a_<2>/a_<1>\) (рис. 6.3).
 Рис. 6.3. k=-1. Прямая y=-x+1/2
Рис. 6.3. k=-1. Прямая y=-x+1/2
Отношение компонент направляющего вектора \(a_<2>/a_<1>\) называется угловым коэффициентом прямой.
Угловой коэффициент прямой в декартовой прямоугольной системе координат равен тангенсу угла, который прямая образует с осью абсцисс. Угол этот отсчитывается от оси абсцисс в направлении кратчайшего поворота от \(\boldsymbol
 Рис. 6.4. \(k=\operatorname
Рис. 6.4. \(k=\operatorname
Положив \(x = 0\) в уравнении \eqref
Если же в уравнении прямой \(B = 0\) и ее уравнение нельзя представить в виде \eqref
Векторные уравнения плоскости и прямой.
Параметрическое уравнение плоскости утверждает, что точка \(M\) лежит на плоскости тогда и только тогда, когда разность ее радиус-вектора и радиус-вектора начальной точки \(M_<0>\) компланарна направляющим векторам \(\boldsymbol
\) и \(\boldsymbol\). Эту компланарность можно выразить и равенством
$$
(\boldsymbol
, \boldsymbol) = 0.\label
$$
Вектор \(\boldsymbol
, \boldsymbol]\) — ненулевой вектор, перпендикулярный плоскости. Используя его, мы можем записать уравнение \eqref
$$
(\boldsymbol
$$
Уравнения \eqref
$$
(\boldsymbol
$$
Для прямой на плоскости можно также написать векторные уравнения, аналогичные \eqref
$$
(\boldsymbol
$$
Первое из них выражает тот факт, что вектор \(\boldsymbol
Пусть \(x, y, z\) — компоненты вектора \(\boldsymbol
Обратно, для любого линейного многочлена найдутся такие векторы \(\boldsymbol
Первая часть предложения очевидна: подставим разложение вектора \(\boldsymbol
$$
(x\boldsymbol
$$
раскроем скобки и получим многочлен \(Ax+By+Cz+D\), в котором \(D = -(\boldsymbol
$$
A = (\boldsymbol
$$
\(A\), \(B\) и \(C\) одновременно не равны нулю, так как ненулевой вектор \(\boldsymbol
Для доказательства обратного утверждения найдем сначала вектор \(\boldsymbol
$$
\boldsymbol
$$
Вектор \(\boldsymbol
Итак, мы нашли векторы \(\boldsymbol
$$
x(\boldsymbol
$$
который совпадает с требуемым \((\boldsymbol
Если система координат декартова прямоугольная, то вектор с компонентами \(A\), \(B\), \(C\) является нормальным вектором для плоскости с уравнением \(Ax+By+Cz+D = 0\).
Это сразу вытекает из формул \eqref
Любые два неколлинеарных вектора, удовлетворяющие уравнению \eqref
Утверждение 5 нетрудно доказать и непосредственно, рассматривая координаты вектора, параллельного плоскости, как разности соответствующих координат двух точек, лежащих в плоскости.
Все, сказанное о плоскостях, почти без изменений может быть сказано и о прямых на плоскости. В частности, верно следующее утверждение.
Действительно, \(\alpha_<1>, \alpha_<2>\), должны быть пропорциональны компонентам — \(B\), \(A\) направляющего вектора прямой.
Параллельность плоскостей и прямых на плоскости.
Ниже, говоря о параллельных прямых или плоскостях, мы будем считать, что параллельные плоскости (или прямые) не обязательно различны, то есть что плоскость (прямая) параллельна самой себе.
Прямые линии, задаваемые в общей декартовой системе координат уравнениями
$$
Ax+By+C = 0,\ A_<1>x+B_<1>y+C_ <1>= 0,\nonumber
$$
параллельны тогда и только тогда, когда соответствующие коэффициенты в их уравнениях пропорциональны, то есть существует такое число \(\lambda\), что
$$
A_ <1>= \lambda A,\ B_ <1>= \lambda B.\label
$$
Прямые совпадают в том и только том случае, когда их уравнения пропорциональны, то есть помимо уравнения \eqref
$$
C_ <1>= \lambda C.\label
$$
Первая часть предложения прямо следует из того, что векторы с компонентами \((-B, A)\) и \((-B_<1>, A_<1>)\) — направляющие векторы прямых.
Докажем вторую часть. В равенствах \eqref
Обратно, пусть прямые параллельны. В силу первой части предложения их уравнения должны иметь вид \(Ax+By+C = 0\) и \(\lambda(Ax+By)+C_ <1>= 0\) при некотором \(\lambda\). Если, кроме того, существует общая точка \(M_<0>(x_<0>, y_<0>)\) обеих прямых, то \(Ax_<0>+By_<0>+C = 0\) и \(\lambda(Ax_<0>+By_<0>)+C_ <1>= 0\). Вычитая одно равенство из другого, получаем \(C_ <1>= \lambda C\), как и требовалось.
Плоскости, задаваемые в общей декартовой системе координат уравнениями
$$
Ax+By+Cz+D = 0,\ A_<1>x+B_<1>y+C_<1>z+D_ <1>= 0\nonumber
$$
параллельны тогда и только тогда, когда соответствующие коэффициенты в их уравнениях пропорциональны, то есть существует такое число \(\lambda\), что
$$
A_ <1>= \lambda A,\ B_ <1>= \lambda B,\ C_ <1>= \lambda C.\label
$$
Плоскости совпадают в том и только том случае, когда их уравнения пропорциональны, то есть помимо уравнений \eqref
$$
D_ <1>= \lambda D.\label
$$
Если плоскости параллельны, то их нормальные векторы \(\boldsymbol
Условия \eqref
$$
\begin
A& B\\
A_<1>& B_<1>
\end
= 0,\label
$$
а условие параллельности плоскостей — в виде
$$
\begin
B& C\\
B_<1>& C_<1>
\end
\begin
C& A\\
C_<1>& A_<1>
\end
\begin
A& B\\
A_<1>& B_<1>
\end
= 0.\label
$$
Утверждению 7 можно придать чисто алгебраическую формулировку, если учесть, что координаты точки пересечения прямых — это решение системы, составленной из их уравнений.
При условии \eqref
$$
Ax+By+C = 0,\ A_<1>x+B_<1>y+C_ <1>= 0,\nonumber
$$
не имеет решений или имеет бесконечно много решений (в зависимости от \(C\) и \(C_<1>\). В последнем случае система равносильна одному из составляющих ее уравнений. Если же
$$
\begin
A& B\\
A_<1>& B_<1>
\end
\neq 0.\nonumber
$$
то при любых \(C\) и \(C_<1>\) система имеет единственное решение \((x, y)\).
Уравнения прямой в пространстве.
Прямая линия в пространстве может быть задана как пересечение двух плоскостей и, следовательно, в общей декартовой системе координат определяется системой уравнений вида
$$
\left\<\begin
Ax+By+Cz+D = 0,\\
A_<1>x+B_<1>y+C_<1>z+D_ <1>= 0.
\end
$$
Пересечение плоскостей — прямая линия тогда и только тогда, когда они не параллельны, что согласно \eqref
$$
\begin
B& C\\
B_<1>& C_<1>
\end
\begin
C& A\\
C_<1>& A_<1>
\end
\begin
A& B\\
A_<1>& B_<1>
\end
\neq 0.\label
$$
Разумеется, систему \eqref
Вспомним параметрические уравнения прямой \eqref
$$
t = \frac
$$
и мы получаем два равенства
$$
\frac
$$
или, в более симметричном виде,
$$
\frac
$$
Уравнения \eqref
Если обращается в нуль одна из компонент направляющего вектора, например, \(\alpha_<1>\), то уравнения прямой принимают вид
$$
x = x_<0>,\ \frac
$$
Эта прямая лежит в плоскости \(x = x_<0>\) и, следовательно, параллельна плоскости \(x = 0\). Аналогично пишутся уравнения прямой, если в нуль обращается не \(\alpha_<1>\), а другая компонента.
Когда равны нулю две компоненты направляющего вектора, например, \(\alpha_<1>\) и \(\alpha_<2>\), то прямая имеет уравнения
$$
x = x_<0>,\ y = y_<0>.\label
$$
Такая прямая параллельна одной из осей координат, в нашем случае — оси аппликат.
Важно уметь находить начальную точку и направляющий вектор прямой, заданной системой линейных уравнений \eqref
Не будем доказывать этого, хотя это и не трудно сделать. Для ясности, заменяя \(z\) на \(t\), получаем параметрические уравнения прямой
$$
x = \alpha_<1>t+\beta_<1>,\ y = \alpha_<2>t+\beta_<2>,\ z = t.\nonumber
$$
Первые две координаты начальной точки прямой \(M_<0>(\beta_<1>, \beta_<2>, 0)\) можно получить, решая систему \eqref
Из параметрических уравнений видно, что в этом случае направляющий вектор имеет координаты \((\alpha_<1>, \alpha_<2>, 1)\). Найдем его компоненты в общем виде. Если система координат декартова прямоугольная, векторы с компонентами \((A, B, C)\) и \(A_<1>, B_<1>, C_<1>\) перпендикулярны соответствующим плоскостям, а потому их векторное произведение параллельно прямой \eqref
$$
\begin
B& C\\
B_<1>& C_<1>
\end
\begin
C& A\\
C_<1>& A_<1>
\end
\begin
A& B\\
A_<1>& B_<1>
\end
$$
Вектор с компонентами \eqref
Согласно утверждению 5 каждый ненулевой вектор, компоненты которого \((\alpha_<1>, \alpha_<2>, \alpha_<3>)\) удовлетворяют уравнению \(A\alpha_<1>+B\alpha_<2>+C\alpha_ <3>= 0\), параллелен плоскости с уравнением \(Ax+By+Cz+D = 0\). Если, кроме того, он удовлетворяет уравнению \(A_<1>\alpha_<1>+B_<1>\alpha_<2>+C_<1>\alpha_ <3>= 0\), то он параллелен и второй плоскости, то есть может быть принят за направляющий вектор прямой. Вектор с компонентами \eqref
Векторная алгебра — основные понятия с примерами решения и образцами выполнения
Вектором называется направленный отрезок. Вектор обозначается либо символом  (
(  — точка начала,
— точка начала,  — точка конца вектора), либо
— точка конца вектора), либо  . В математике обычно рассматриваются свободные векторы, то есть векторы, точка приложения которых может быть выбрана произвольно.
. В математике обычно рассматриваются свободные векторы, то есть векторы, точка приложения которых может быть выбрана произвольно.
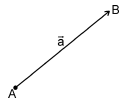
2. Длиной (модулем) вектора называется длина отрезка  . Модуль вектора обозначается
. Модуль вектора обозначается  .
.
3.Вектор называется единичным, если его длина равна «1»; единичный вектор  направления вектора называется ортом вектора и определяется по формуле
направления вектора называется ортом вектора и определяется по формуле  .
.
4. Вектор называется нулевым, если его начало и конец совпадают  ; любое направление можно считать направлением нулевого вектора.
; любое направление можно считать направлением нулевого вектора.
5. Векторы называются коллинеарными, если они лежат либо на одной прямой, либо на параллельных прямых. Коллинеарность векторов обозначается:  . Необходимым и достаточным условием коллинеарности векторов и
. Необходимым и достаточным условием коллинеарности векторов и  является существование такого числа
является существование такого числа  , что
, что  .
.
6. Два вектора называются равными, если они коллинеарны, имеют одинаковую длину и направление.
7. Вектор  называется противоположным вектору , если модули их равны, а направления противоположны.
называется противоположным вектору , если модули их равны, а направления противоположны.
8. Векторы называются компланарными, если они лежат в одной плоскости или в параллельных плоскостях.
Для решения задач необходимо уметь выполнять линейные операции над вектором в геометрической форме, то есть над вектором, как над
направленным отрезком: сложение, вычитание векторов и умножение вектора на число.
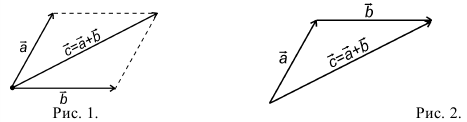
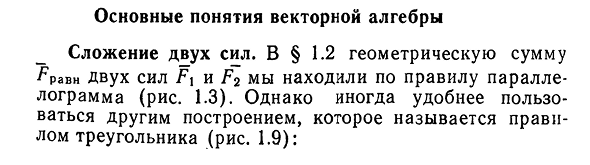
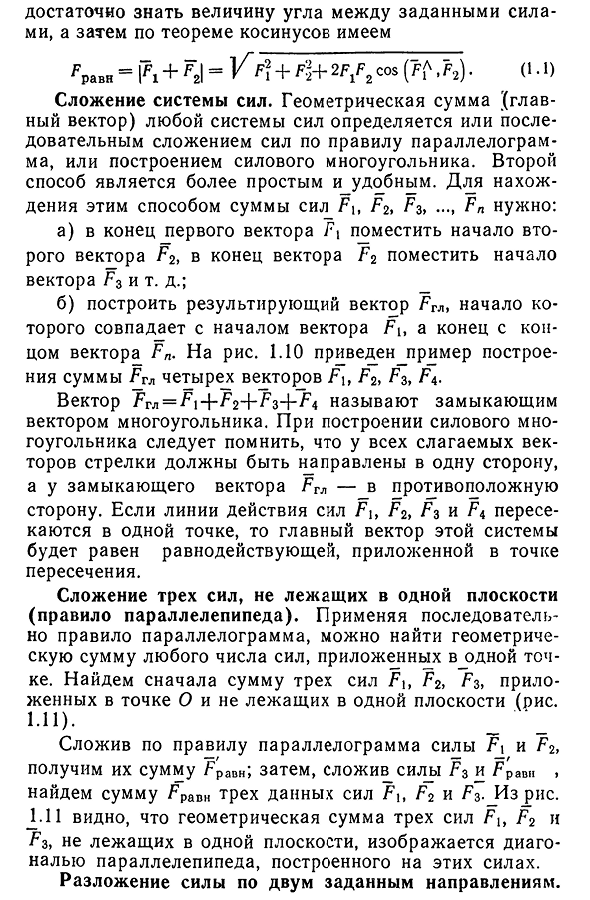
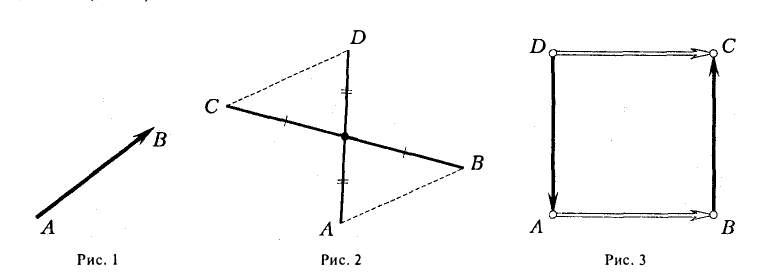
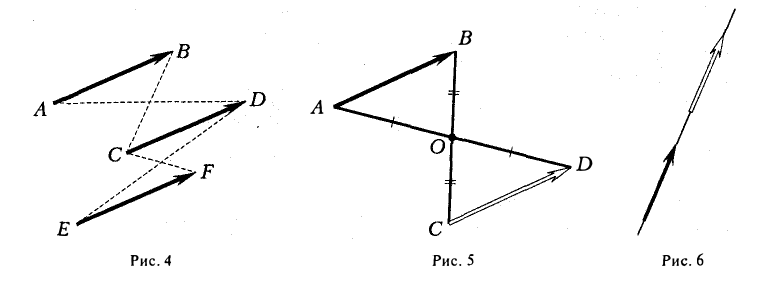
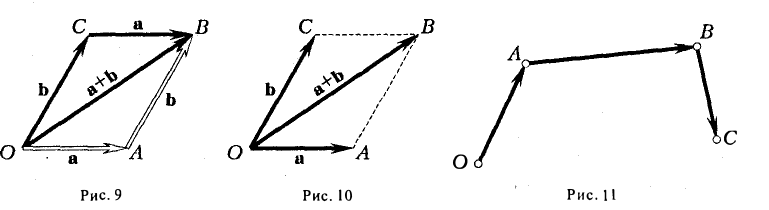
9. Сложение двух векторов можно выполнить по правилу параллелограмма (рис. 1) или по правилу треугольника (рис. 2).
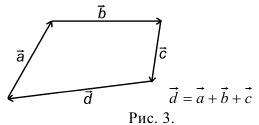
При сложении более двух векторов, лежащих в одной плоскости, используется правило «замыкающей линии многоугольника» (рис. 3).
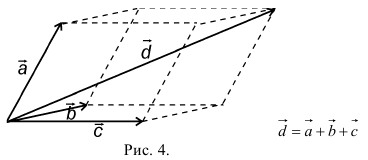
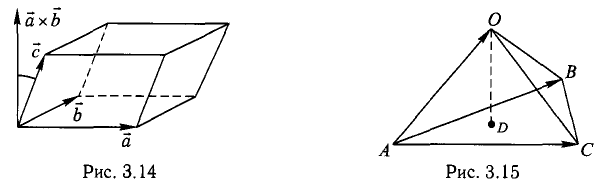
При сложении трех некомпланарных векторов удобно пользоваться правилом «параллелепипеда» (рис. 4).
10. Действие вычитания двух векторов связано с действием сложения (рис.5).
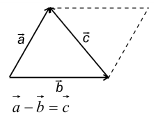
Разностью двух векторов называется вектор, проведенный из конца вычитаемого в конец уменьшаемого. Заметим, что разностью является вектор, служащий второй диагональю параллелограмма.
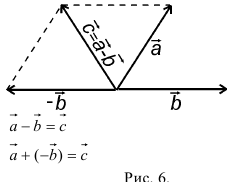
Разность можно также представить в виде сложения с противоположным вектором (рис. 6).
11. Произведением вектора на число называется вектор  , который имеет :
, который имеет :
- модуль, равный
 ;
; - направление, одинаковое с , если .
- направление, противоположное с , если .
 ;
; .
. .
.12. Для решения задач полезно знать также следующие законы и свойства:
- переместительный:
- сочетательный:
- распределительный:

Примеры задач решаемых с применением векторной алгебры
Задача:
Пусть даны точки 

1) Найти координаты векторов

2) Написать разложение этих векторов по базису 
3) Найти длины этих векторов
4) Найти скалярное произведение 
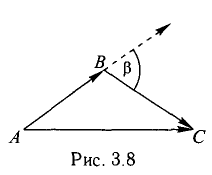
5) Найти угол между векторами  и
и  .
.
6) Найти разложение вектора по базису и 
Решение:
1) Вычислим координаты векторов и  (нужно из координат точки его конца вычесть координаты его начала):
(нужно из координат точки его конца вычесть координаты его начала):

 , аналогично,
, аналогично, 
 и
и 
2) 

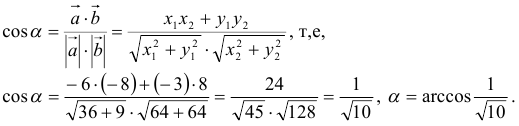
4) Для вычисления угла между векторами воспользуемся формулой:
5) Разложить вектор по векторам и — это значит представить вектор в виде линейной комбинации векторов и , т. е.
 , где
, где  . Имеем
. Имеем 

 , но у равных векторов соответственно равны координаты, следовательно, получим систему, из которой найдем
, но у равных векторов соответственно равны координаты, следовательно, получим систему, из которой найдем  и
и  .
.

Задача:
а). Даны векторы  и
и  в некотором базисе. Показать, что векторы
в некотором базисе. Показать, что векторы  образуют базис и найти координаты вектора
образуют базис и найти координаты вектора  в этом базисе.
в этом базисе.
Решение:
Три вектора образуют базис, если  .
.

Найдем координаты вектора в базисе  и
и  .
.

Два вектора равны, если их соответствующие координаты равны.
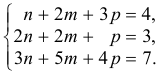
Решим систему методом Крамера:
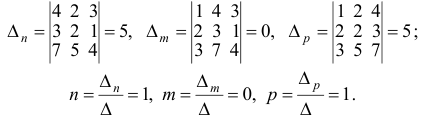
Ответ:  .
.
Задача:
Даны координаты вершин тетраэдра 
 и
и  . Найти: 1) координаты точки пересечения медиан треугольника
. Найти: 1) координаты точки пересечения медиан треугольника  ; 2) уравнение прямой, проходящей через вершину
; 2) уравнение прямой, проходящей через вершину  параллельно медиане, проведенной из вершины
параллельно медиане, проведенной из вершины  треугольника ; 3) координаты точки, симметричной точке относительно плоскости
треугольника ; 3) координаты точки, симметричной точке относительно плоскости  . Сделать чертёж.
. Сделать чертёж.
Решение:
1) Найдем координаты т.  середины отрезка
середины отрезка  (рис. 16):
(рис. 16): 


Точка  пересечения медиан треугольника делит медиану
пересечения медиан треугольника делит медиану  в отношении
в отношении  , считая от вершины . Найдем координаты точки :
, считая от вершины . Найдем координаты точки :
2) Найдем направляющий вектор прямой 
 . Уравнение прямой, проходящей через вершину параллельно прямой
. Уравнение прямой, проходящей через вершину параллельно прямой  :
:

3) Найдем уравнение плоскости :

Найдем каноническое уравнение прямой, перпендикулярной плоскости и проходящей через т. :  . Запишем каноническое уравнение прямой в параметрическом виде:
. Запишем каноническое уравнение прямой в параметрическом виде: 
 .
.
Найдем координаты точки  пересечения плоскости и найденной прямой:
пересечения плоскости и найденной прямой: 

Координаты точки  симметричной точке относительно плоскости —
симметричной точке относительно плоскости —  .
.
Ответ: 1) координаты точки пересечения медиан  уравнение прямой
уравнение прямой  ; 3) координаты симметричном точки .
; 3) координаты симметричном точки .
На этой странице размещён краткий курс лекций по высшей математике для заочников с теорией, формулами и примерами решения задач:
Возможно вам будут полезны эти страницы:
Векторная алгебра — решение заданий и задач по всем темам с вычислением
Понятие вектора. Линейные операции над векторами
1°. Любые две точки  пространства, если они упорядочены (например, А является первой, а В — второй точкой), определяют отрезок вместе с выбранным направлением (а именно, от A к В). Направленный отрезок называется вектором. Вектор с началом в A и концом в В обозначается
пространства, если они упорядочены (например, А является первой, а В — второй точкой), определяют отрезок вместе с выбранным направлением (а именно, от A к В). Направленный отрезок называется вектором. Вектор с началом в A и концом в В обозначается  или
или  Длина вектора, обозначаемая , АВ или
Длина вектора, обозначаемая , АВ или  а, называется также модулем вектора. Чтобы найти координаты вектора, нужно из координат конца вектора вычесть одноименные координаты начала:
а, называется также модулем вектора. Чтобы найти координаты вектора, нужно из координат конца вектора вычесть одноименные координаты начала:  Тогда длина вектора найдется так:
Тогда длина вектора найдется так:
Векторы, расположенные на одной прямой или на параллельных прямых, называются коллинеарными.
Два вектора  называются равными, если они коллинеарны, имеют одинаковые модули и направления. В этом случае пишут
называются равными, если они коллинеарны, имеют одинаковые модули и направления. В этом случае пишут  Равные векторы имеют равные координаты.
Равные векторы имеют равные координаты.
Векторы называются противоположными, если они коллинеарны, имеют одинаковые длины и противоположные направления: 
Вектор называется нулевым, если его модуль равен нулю, и обозначается 
2°. Линейными называются действия сложения, вычитания векторов и умножения вектора на число.
1.Если начало  совмещено с концом
совмещено с концом  то начало
то начало  совпадает с началом а конец — с концом (рис. 3.1).
совпадает с началом а конец — с концом (рис. 3.1).
2.Если начала векторов совмещены, то начало  совпадает с концом , а конец совпадает с концом (рис. 3.2).
совпадает с концом , а конец совпадает с концом (рис. 3.2).
3.При умножении вектора  на число (скаляр)
на число (скаляр)  длина вектора умножается на
длина вектора умножается на  , а направление сохраняется, если
, а направление сохраняется, если  и изменяется на противоположное, если
и изменяется на противоположное, если  (рис. 3.3).
(рис. 3.3).
Вектор  называется ортом, или единичным вектором вектора его длина равна единице:
называется ортом, или единичным вектором вектора его длина равна единице:
3°. Запись ci —  означает, что вектор имеет координаты
означает, что вектор имеет координаты  или разложен по базису
или разложен по базису  — орты осей Ох, Оу и Oz пространственной системы координат Oxyz). При этом
— орты осей Ох, Оу и Oz пространственной системы координат Oxyz). При этом

4°. Числа  называются направляющими косинусами вектора
называются направляющими косинусами вектора  — углы между вектором и координатными осями Ох, Оу, Oz соответственно. Единичный вектор
— углы между вектором и координатными осями Ох, Оу, Oz соответственно. Единичный вектор  — орт вектора . Для любого вектора справедливо:
— орт вектора . Для любого вектора справедливо: 
5°. Линейные операции над векторами, которые заданы своими координатами, определяются так: пусть  тогда
тогда

Следовательно, при сложении векторов складываются их соответствующие координаты, а при умножении вектора на число умножаются на число все координаты вектора.
6°. Необходимое и достаточное условие коллинеарности векторов , устанавливаемое равенством  может быть записано соотношениями
может быть записано соотношениями  из которых следует пропорциональность их координат:
из которых следует пропорциональность их координат: 
Если один из членов какого-нибудь из этих отношений равен нулю, то и второй член того же отношения должен быть нулем. Геометрически это значит, что в этом случае оба вектора перпендикулярны соответствующей координатной оси (например, если  то векторы
то векторы  ).
).
7°. Система векторов  называется линейно независимой, если равенство
называется линейно независимой, если равенство

(  — действительные числа) возможно только при
— действительные числа) возможно только при  Если же равенство (1) возможно при некотором нетривиальном наборе
Если же равенство (1) возможно при некотором нетривиальном наборе  то система этих векторов называется линейно зависимой. Любой вектор линейно зависимой системы линейно выражается через остальные.
то система этих векторов называется линейно зависимой. Любой вектор линейно зависимой системы линейно выражается через остальные.
Примеры с решениями
Пример:
Доказать, что треугольник с вершинами в точках A(1,2), B(2,5), С(3,4) прямоугольный.
Решение:
Построим векторы, совпадающие со сторонами треугольника (см. п. 1°):  (рис. 3.4).
(рис. 3.4).

Найдем длины сторон: 

Нетрудно видеть, что  Следовательно, треугольник ABC прямоугольный с гипотенузой
Следовательно, треугольник ABC прямоугольный с гипотенузой  и катетами
и катетами 
Пример:
Проверить, что точки А( 2,-4,3), В(5, —2,9), С( 7,4,6) и D(6,8, -3) являются вершинами трапеции.
Решение:
Составим векторы-стороны с целью обнаружения коллинеарности векторов (в трапеции ВС || AD) (рис. 3.5):

Имеем  значит, ABCD — трапеция.
значит, ABCD — трапеция.
Пример:
Найти орт и направляющие косинусы вектора 
Решение:
Имеем  В соответствии с п. 3°, 4°
В соответствии с п. 3°, 4°
 и направляющие косинусы вектора
и направляющие косинусы вектора 
 причем
причем 
Пример:
Определить точку В, которая является концом вектора  , если его начало совпадает с точкой
, если его начало совпадает с точкой
Решение:
Пусть точка В имеет координаты B(x,y,z) (рис. 3.6). Тогда координа- ^ ты вектора (п. 1°)

Следовательно,  Ответ. В(5, -5,3).
Ответ. В(5, -5,3).
Пример:
Вектор  разложить по векторам
разложить по векторам

Решение:
Необходимо найти такие числа х, у, z, что  т.е.
т.е.

Имея в виду, что при сложении векторов складываются их координаты и равные векторы имеют равные координаты, приходим к системе уравнений
Ответ. 
Пример:
Показать, что система векторов 
 линейно независима.
линейно независима.
Решение:
В данном случае равенство (1) имеет вид  , или
, или  Отсюда получаем систему уравнений
Отсюда получаем систему уравнений
из которой следует, что  Это подтверждает линейную независимость данных векторов.
Это подтверждает линейную независимость данных векторов.
Пример:
Показать, что система векторов 
 линейно зависима.
линейно зависима.
Решение:
Равенство (1) равносильно системе уравнений
Она имеет ненулевое решение, например,  Таким образом,
Таким образом,  Отсюда видно, что
Отсюда видно, что  т.е. вектор
т.е. вектор  линейно выражается через
линейно выражается через  Очевидно, что
Очевидно, что  можно выразить через
можно выразить через  — через
— через 
Скалярное произведение векторов
1°. Скалярным произведением двух ненулевых векторов а и b называется число, равное произведению их длин на косинус угла  между ними:
между ними:

Из  (рис. 3.7) имеем
(рис. 3.7) имеем  (
(  — проекция вектора на направление вектора ).
— проекция вектора на направление вектора ).
Итак, 

т.е. скалярное произведение векторов равно сумме произведений одноименных координат этих векторов.
При этом  если же
если же  , т. е.
, т. е.  поскольку cos 90° = 0 (условие перпендикулярности двух векторов).
поскольку cos 90° = 0 (условие перпендикулярности двух векторов).
3°. Из определения скалярного произведения следует формула для вычисления угла между двумя векторами:

Примеры с решениями
Пример:
Перпендикулярны ли векторы  если
если 
Решение:
Условие перпендикулярности векторов (п. 2°)  в нашем случае
в нашем случае

Пример:
Найти проекцию вектора  на направление вектора
на направление вектора 
Решение:
Имеем  (п. 1°). Подставив сюда выражение для
(п. 1°). Подставив сюда выражение для  из п. 3°, получим
из п. 3°, получим

Ответ 
Пример:
Зная векторы, совпадающие с двумя сторонами:  и
и  найти внутренние углы треугольника ABC.
найти внутренние углы треугольника ABC.
Решение:


При помощи таблиц находим  Для нахождения других углов нам понадобится вектор
Для нахождения других углов нам понадобится вектор  который является суммой
который является суммой  :
:  поэтому
поэтому 
Ответ. 123° 10′, 19°29′, 37°21′.
Пример:
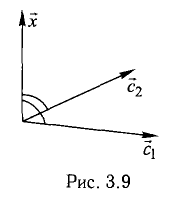
Найти координаты вектора  если
если  где
где  и
и 
Решение:
На рис. 3.9 имеем Из условий перпендикулярности векторов (п. 2°) имеем  Положим
Положим  Условие задачи перепишем в виде Рис. 3.9 системы
Условие задачи перепишем в виде Рис. 3.9 системы
Векторное произведение векторов
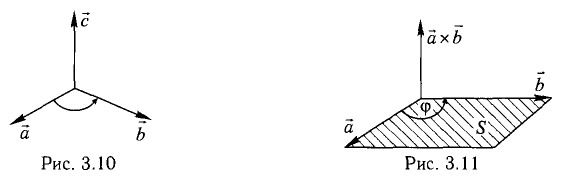
1°. Векторы  приведенные к одному началу, образуют правую (левую) тройку при условии: если смотреть из конца вектора
приведенные к одному началу, образуют правую (левую) тройку при условии: если смотреть из конца вектора  на плоскость векторов
на плоскость векторов  то кратчайший поворот от
то кратчайший поворот от  совершается против (по) часовой стрелки (рис. 3.10).
совершается против (по) часовой стрелки (рис. 3.10).
2°. Векторным произведением ненулевых векторов называется вектор , обозначаемый  удовлетворяющий следующим трем условиям.
удовлетворяющий следующим трем условиям.
1)  вектор перпендикулярен плоскости векторов
вектор перпендикулярен плоскости векторов 
2) Вектор  направлен так, что векторы
направлен так, что векторы 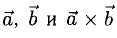 образуют правую тройку.
образуют правую тройку.
3)  т.е. его длина численно равна площади параллелограмма, построенного на векторах (рис. 3.11), таким образом,
т.е. его длина численно равна площади параллелограмма, построенного на векторах (рис. 3.11), таким образом, 
Если векторы коллинеарны, то под понимается нулевой вектор:
3°. Если известны координаты векторов-сомножителей  то для отыскания координат векторного произведения служит формула
то для отыскания координат векторного произведения служит формула
в которой определитель следует разложить по элементам первой строки.
Примеры с решениями
Пример:
Найти площадь треугольника, вершины которого находятся в точках А(1,2,3), В<3,2,1), С(1,0,1).
Решение:
Найдем координаты векторов  Определим координаты векторного произведения
Определим координаты векторного произведения  (рис. 3.12):
(рис. 3.12):
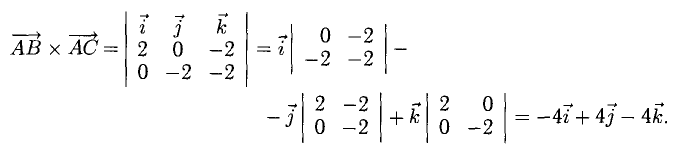
Найдем длину этого вектора, которая равна численно площади параллелограмма S (п. 2°):  Площадь треугольника
Площадь треугольника  равна
равна 
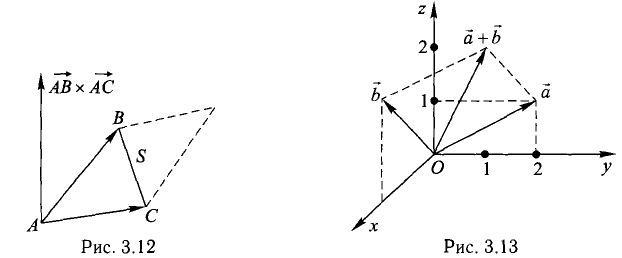
Пример:
Построить параллелограмм на векторах  и
и  вычислить его площадь и высоту, опущенную на .
вычислить его площадь и высоту, опущенную на .
Сделаем чертеж (рис. 3.13). Имеем  Отдельно вычисляем векторное произведение:
Отдельно вычисляем векторное произведение:

Смешанное произведение векторов
1°. Смешанным произведением трех ненулевых векторов  называется число, равное скалярному произведению двух векторов, один из которых — векторное произведение , а другой — вектор . Обозначение:
называется число, равное скалярному произведению двух векторов, один из которых — векторное произведение , а другой — вектор . Обозначение:  Если образуют правую тройку, то
Если образуют правую тройку, то  Если образуют левую тройку, то
Если образуют левую тройку, то 
Модуль смешанного произведения векторов равен объему параллелепипеда (рис. 3.14), построенного на этих векторах,  Условие
Условие  равносильно тому, что векторы расположены в одной плоскости, т.е. компланарны. Имеет место равенство
равносильно тому, что векторы расположены в одной плоскости, т.е. компланарны. Имеет место равенство
Объем тетраэдра с вершинами в точках 
 можно вычислить по формуле
можно вычислить по формуле  где
где
2°. Условие 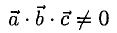 равносильно условию линейной независимости , а тогда любой вектор
равносильно условию линейной независимости , а тогда любой вектор  линейно выражается через них, т. е.
линейно выражается через них, т. е.  Для определения х, у, z следует решить соответствующую систему линейных уравнений
Для определения х, у, z следует решить соответствующую систему линейных уравнений
Примеры с решениями
Пример:
Найти объем параллелепипеда, построенного на векторах 
Решение:
Искомый объем  Поскольку
Поскольку
Пример:
В точках 0(0,0,0), А(5,2,0), В(2,5,0) и С(1,2,4) находятся вершины пирамиды. Вычислить ее объем, площадь грани ABC и высоту пирамиды, опущенную на эту грань.
Решение:
1) Сделаем схематический чертеж (рис. 3.15).
2) Введем векторы 
 .Объем пирамиды ОАВС (тетраэда) равен
.Объем пирамиды ОАВС (тетраэда) равен

3) Площадь грани ABC

4) Объем пирамиды  отсюда
отсюда 
Ответ. 
Основные понятия векторной алгебры
Прямоугольные декартовы координаты
Координатная ось
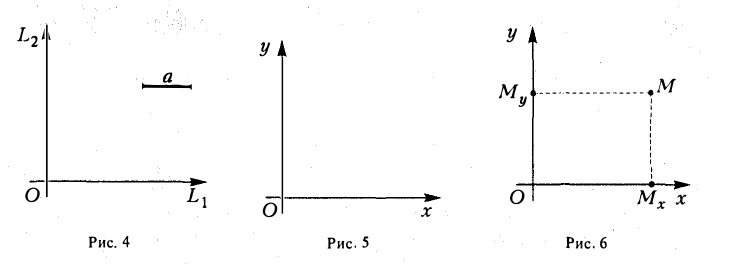
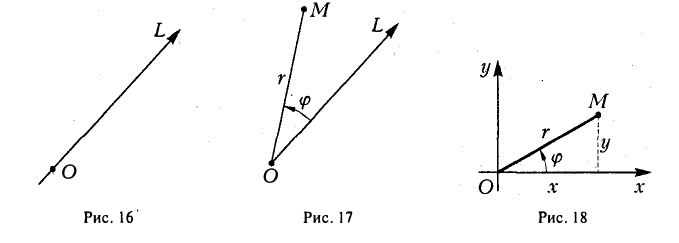
Пусть на плоскости или в пространстве задана произвольная прямая L: Ясно, что по этой прямой L сы можем перемещаться в oднoм из двух противоположных направлений. Выбор любого (одного) из этих направлений будем называть ориентацией прямой L.
Оnределение:
Прямая с заданной на ней ориентацией называется осью. На чертеже ориентация оси указывается стрелкой (рис. 1 ) . Фиксируем на оси  некоторую точку О и выберем какой-нибудь отрезок а, доложив по определению его длину равной единице (рис. 2).
некоторую точку О и выберем какой-нибудь отрезок а, доложив по определению его длину равной единице (рис. 2).
Пусть М — произвольная точка оси . Поставим этой точке в соответствие число х по следующему прав илу: х равно расстоюiию между точками О и М, взятому со знаком плюс или со знаком минус н зависимости от того, совпадает ли направление движения от точки О к точке М с заданным направлением или противоположно ему (рис. 3).

Оnределение:
Ось с точкой начала отсчета О и масштабными отрезками а называется координатной осью, а число х, вычисляемое по указанному правилу, называется координатой точки М. Обозначение: М (х).
Прямоугольные декартовы координаты на плоскости
Пусть П — произвольная плоскость. Возьмем на ней некоторую точку О и проведем через эту точку взаимно перпендикулярные прямые L 1 и L 2. Зададим на каждой из nрямых L 1 и L 2 ориентацию и выберем единый масштабный отрезок а. Тогда эти прямые nревратятся в координатные оси с общей точкой отсчета О (рис. 4).
Назовем одну из координатных осей осью абсцисс (осью Ох), друrую —осью ординат (осью Оу) (рис. 5). Точка О называется началом координат. Пусть М — произвольная точка плоскости П (рис. 6). Проведем через точку М прямые, перпендикулярные координатным осям, и поставим ей в соответствие упорядоченную пару чисел (х, у) по следующему nравилу:

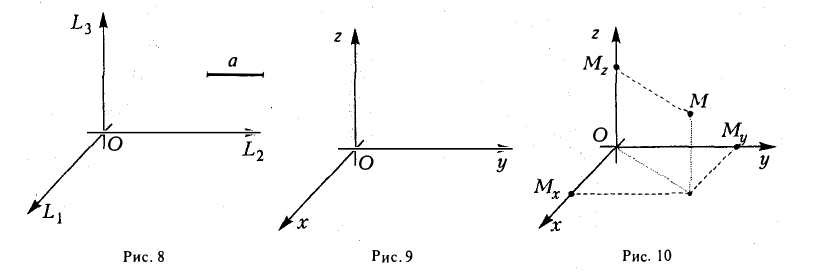
Числа х и у называются прямоугольными декартовыми при этом х называется ее абсциссой, а у — ординатой. координатами точки М; Обозначение: М(х, у). Чтобы кратко охарактеризовать описанную конструкцию, говорят, что на плоскости П задана прямоугольная декартова система координат Ох у. Координатные оси разбивают плоскость на четыре части, называемые четвертями или квадрантами. На рисунке и в таблице показано, как эти квадранты нумеруются (рис. 7).
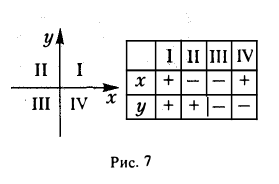
Замечание:
Масштабные от резки на координатных осях могут быть и разной длины. В этом случае координатная система называется просто прямоугольной.
Прямоугольные декартовы координаты в пространстве
Возьмем в пространстве некоторую точку О и проведем через нее три взаимно перпендикулярные прямые L 1 , L 2 и L 3 . Выберем на каждой из nрямых ориентацию и единый масштаб. Прямые L 1 , L 2 и L 3 превратятся в координатные оси с общей точкой отсчета О (рис. 8).
Назовем одну из этих осей осью абсцисс (осью Ох), вторую — осью ординат (осью Оу) и третью — осью аппликат (осью Oz) (рис. 9). Точка О называется началом координат. Пусть М — nроизвольная точка (рис. 10). Проведем через точку М nлоскости, перпендикулярные координатным осям, и поставим ей в соответстnие упорядоченную тройку чисел (х, у, z) по следующему правилу:
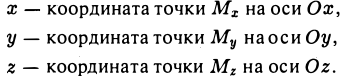
Числа х, у и z называются прямоугольными декартовыми координатами точки М; при этом х называется абсциссой точки М, у — ее ординатой, а z —аппликатой. Обозначение: М(х, у, z). Таким образом, в пространстве введена прямоугольная декартова система координат.
Оnределение:
Плоскость, проходящая через любую пару координатных осей, называется координатной плоскостью.
Координатных плоскостей три: Оху, Oyz и Oxz. Эти плоскости разбивают пространство на восемь частей — октантов. 1 .4. Простейшие задачи аналитической геометрии А. Расстояние между точками Пусть М 1 (х 1 ) и М 2 (х 2 )- две точки на координатной оси. Тогда расстояние d между ними вычисляется по формуле

Если на плоскости задана прямоугольная декартова система координат Оху, то расстояние d между любыми двумя точками М 1 (х 1 , у1 и М2 (х2 , y2) вычисляется по следующей формуле

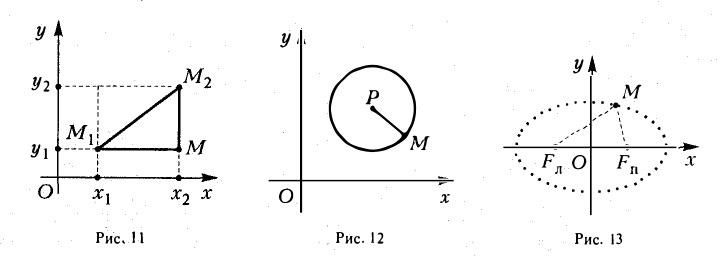
Рассмотрим прямоугольный треугольник ∆MM1M2 (pиc. l l). По теореме Пифагора



,и извлекая из обеих частей равенства квадратный корень, приходим к требуемой формуле .
Замечание:
Расстояние между точками  в пространстве вычисляется по следующей формуле
в пространстве вычисляется по следующей формуле

Задача:
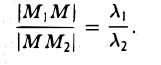
Написать уравнение окружности радиуса т с центром в точке Р(а, b).
Пусть М(х, у) — точка окружности (рис. 12). Это означает, что |M P| = r. Заменим |M P|его выражением

и возведем обе части полученного равенства в квадрат:

Это есть каноническое уравнение окружности радиуса r с центром в точке Р(а, b) .
Задача:
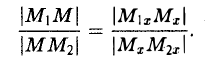
Пусть F л (-с, 0) и F n (c, 0) -фиксированные точки плоскости, а -заданное число (а > с ≥ 0). Найти условие, которому удовлетворяют координаты х и у точки М, обладающей следующим свойством: сумма расстояний от точки М до Fл и до F n равна 2а.
Вычислим расстояния между точками М и F л и между точками М и F n . Имеем


Перенесем второй корень в правую часть

Возводя обе части в квадрат, после простых преобразований получим

С целью дальнейших упрощений вновь возводим обе части в квадрат. В результате nриходим к равенству

Полагая b 2 = а 2 — с 2 и деля обе части nоследнего соотноwения на а 2 b 2 , nолучаем уравнение эллипса

Деление отрезка в данном отношении:
Требуется выразить координаты х и у этой точки через координаты концов отрезка М1М2 и числа λ 1 и λ 2 . Предположим сначала, что отрезок М1М2 не параллелен оси ординат Оу (рис. 14). Тогда

то из последних двух соотношений получаем, что
Точка М лежит между точками М1 и М2 , поэтому либо х 1 х > х 2 . В любом из этих случаев разности х1 — х и х — х 2 имеют одинаковые знаки. Это позволяет переписать последнее равенство в следующей форме

В случае, когда отрезок М1М2 параллелен оси Оу, х 1 = х 2 = х. Заметим, что тот же результат дает формула (*), если nоложить в ней х 1 = х 2 . Справедливость формулы
доказывается аналогичным рассуждением .
Задача:
Найти координаты центра тяжести М треугольника с вершинами в точках . М1 ( х 1 , у 1 ), М2 ( х 2 , у 2 ) и М3 ( х 3 , у 3 ). Восnользуемся тем, что центр тяжести треугольника совпадает с точкой пересечения его медиан. Точка М делит каждую медиану в отношении 2 : 1, считая от вершины (рис. 15). Тем самым, ее координаты х и у можно найти по формулам

где х’ и у’ — координаты второго конца М’ медианы М3 М’. Так как М’ — середина отрезка М1М2, то

Полученные соотношения позволяют выразить координаты z и у центра тяжести М треугольника ∆М1М2М3 через координаты его вершин:

Замечание:

Полярные координаты
Предположим, что задана точка О, ось .содержащая точку О, и масштабный отрезок (эталон длины) (рис. 16).
Пусть М — произвольная точка плоскости, отличная от точки О (рис.17). Ее положение на плоскости однозначно определяется двумя числами: расстоянием г между точками О и М и отсчитываемым против часовой стрелки углом φ между положительным лучом оси и лучом ОМ с началом в точке О. Пару (г, φ) называют полярными координатами точки М; г — полярный радиус точки М , φ — полярный угол.
Точка О называется полюсом, — полярной осью.
Ясно, что Если точка М совпадаете полюсом, то считаем г = 0; полярный угол φ в этом случае не определен.
Если точка М совпадаете полюсом, то считаем г = 0; полярный угол φ в этом случае не определен.
Таким образом, на плоскости можно задать еще одну координатную систему — полярную.
Прямоугольную декартову систему координат Оху будем называть согласованной с заданной полярной, если начало координат 0(0, 0) — полюс, ось Ох — полярная ось, а ось Оу составляете осью Ох угол, равный . Тогда
. Тогда

(рис.18). В свою очередь 
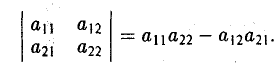
Пример:
Пусть R > О — заданное число. Множество точек плоскости, полярные координаты (г, 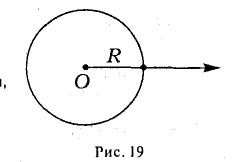
Определители 2-го и 3-го порядков
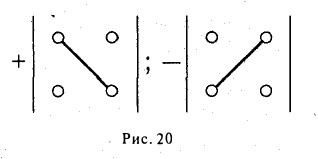
Определителем второго порядка называется число

Обозначение:
Тем самым, для вычисления определителя второго порядка нужно из произведения а11, а22 элементов главной диагонали вычесть произведение а12, а21 элементов его побочной диагонали (рис. 20).
Пример:

По правилу (1) имеем
С определителями второго порядка мы встречаемся уже при отыскании решения системы двух линейных алгебраических уравнений с двумя неизвестными
Решая эту систему методом исключения неизвестных при условии, что

Пусгь теперь даны девять чисел aij (i = I, 2, 3; j = I, 2, 3).
Определителем третьего порядка называется число, обозначаемое символом
и вычисляемое по следующему правилу:

Первый индекс i элемента aij указывает номер строки, в которой он расположен, а второй индекс j — номер столбца.
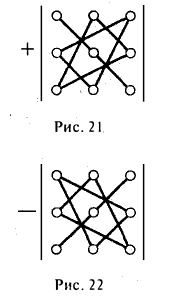
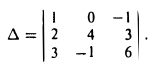
Чтобы разобраться с распределением знаков в правой части формулы (2), обратим внимание на следующее: произведение элементов а11, а22, а33 главной диагонали входит в формулу со своим знаком, также как и произведение а11, а22, а33 и а11, а22, а33 элементов, расположенных в вершинах треугольников, основания которых параллельны главной диагонали (рис. 21); с другой стороны, произведение а13, а22, а31 элементов побочной диагонали, а также произведения а12, а21, а33 и а11, а23, а32 — с противоположным знаком (рис.22). Такой подход к вычислению определителя третьего порядка называется правилом треугольника.
Пример:
Применяя правило треугольника, находим

Установим некоторые свойства определителей 3-го порядка, легко проверяемые при помощи разложений (1) и (2).
Свойство:
Величина определителя не изменится, если все его строки заменить его столбцами с теми же номерами
Свойство:
При перестановке любых двух строк (или любых двух столбцов) определителя он изменяет свой знак на противоположный.
Свойство:
Общий множитель всех элементов одной строки (или одного столбца) определителя можно вынести за знак определителя

Следующие три свойства определителя вытекают из свойств 1-3. Впрочем, в их справедливости можно убедиться и непосредственно, пользуясь формулами (1) и (2).
Свойство:
Если определитель имеет две равные строки (или дна равных столбца), то он равен нулю.
Свойство:
Если все элементы некоторой строки (или некоторого столбца) равны нулю, то и сам определитель равен нулю.
Свойство:
Если соответствующие элементы двух строк (или двух столбцов) пропорциональны, то определитель равен нулю.
Укажем еще один способ вычисления определителя 3-го порядка
Минором Mij элемента aij определителя ∆ называется определитель, получаемый изданного путем вычеркивания элементов i-й строки и j-ro столбца, на пересечении которых находится этот элемент. Например, минором элемента a23 будет определитель
Алгебраическим дополнением элемента Aij называется минор Mij — этого элемента, взятый со своим знаком, если сумма i + j номеров строки и столбца, на пересечении которых расположен элемент aij, есть число четное, и с противоположным знаком, если это число нечетное:
Теорема:
Определитель равен сумме произведений элементов любой его строки (любого его столбца) на их алгебраические дополнения, так что имеют место следующие равенства

Покажем, например, что

Пользуясь формулой (2), получаем, что

Правило (3) называется разложением определителя по элементам i-й строки, а правило (4) — разложением определителя по элементам j -го столбца.
Пример:
Раскладывая определитель по элементам 1-ой строки, получим
Понятия связанного и свободного векторов
Рассмотрим две точки А и В. По соединяющему их отрезку можно перемещаться в любом из двух противоположных направлений. Если считать, например, точку А начальной, а точку В конечной, то тогда получаем направленный отрезок АВ, в другом случае — направленный отрезок В А. Направленные отрезки часто называют связанными или закрепленными векторами. На чертеже заданное направление указывается стрелкой (рис. 1).
В случае, когда начальная и конечная точки совпадают, А = В, связанный вектор называется нулевым.
Определение:
Будем говорить, что связанные векторы АВ и CD равны, если середины отрезков AD и ВС совпадают (рис. 2).
Обозначение:
Заметим, что в случае, когда точки А, В, С и D не лежат на одной прямой, это равносильно тому, что четырехугольник ABCD — параллелограмм. Ясно, что равные связанные векторы имеют равные длины.
Пример:
Рассмотрим квадрат и выберем векторы, как указано на рис.3. Векторы АВ и DC равны, а векторы ВС и DA не равны.
Укажем некоторые свойства равных связанных векторов:
- Каждый связанный вектор равен самому себе: АВ = АВ.
- Если АВ = CD, той CD = АВ.
- Если АВ = CD и CD = EF,то АВ = EF (рис.4).
Пусть АВ — заданный связанный вектор и С — произвольная точка. Ясно, что, опираясь на определение, всегда можно построить точку D так, чтобы
CD = АВ.
Тем самым, от каждой точки можно отложить связанный вектор, равный исходному (рис. 5).
Мы будем рассматривать свободные векторы, т. е. такие векторы, начальную точку которых можно выбирать произвольно, или, что то же самое, которые можно произвольно переносить параллельно самим себе. Ясно, что свободный вектор  однозначно определяется заданием связанного вектора АВ.
однозначно определяется заданием связанного вектора АВ.
Если в качестве начальных выбирать лишь те точки, которые лежат на прямой, определяемой заданным (ненулевым) связанным вектором, то мы приходим к понятию скользящего вектора (рис. 6).
Связанные и скользящие векторы широко используются в теоретической механике.
Для обозначен ия свободных векторов будем пользоваться полужирными строчными латинскими буквами — а, b, с,… ; нулевой вектор обозначается через 0.
Пусть заданы вектор а и точка А. Существует ровно одна точка В, для которой
= а
(рис.7). Операция построения связанного вектора АВ, для которого выполняется это равенство, называется откладыванием свободного вектора а от точки А.
Заметим, что связанные векторы, получаемые в результате описанной операции откладывания, равны между собой и, значит, имеют одинаковую дли ну. Это позволяет ввести длину свободного вектора а, которую мы будем обозначать символом |а. Длина нулевого вектора равна нулю. Если а = b, то |а| = |b; обратное неверно.
Линейные операции над векторами
Сложение векторов
Пусть заданы два вектора а и b. Возьмем какую-нибудь точку О и отложим от нее вектор a:  = а. От полученной точки А отложим вектор b: = b. Полученный в результате вектор
= а. От полученной точки А отложим вектор b: = b. Полученный в результате вектор  называется суммой векторов а и b и обозначается через a + b (рис. 8). Этот способ построения суммы векторов называется правилом треугольника.
называется суммой векторов а и b и обозначается через a + b (рис. 8). Этот способ построения суммы векторов называется правилом треугольника.
Нетрудно заметить, что сложение векторов коммутативно, т. е. для любых векторов а и b справедливо равенство
а + b = b + а
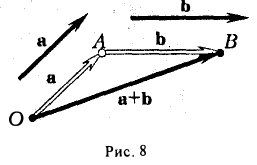
Если отложить векторы а и 1» от обшей точки О и построить на них как на сторонах параллелограмм, то вектор , идущий из общего начала О в противоположную вершину параллелограмма, будет их суммой а + b (или b +а) (рис. 10). Этот способ построения суммы векторов называется правилом параллелограмма.
Пусть заданы три вектора, например, a, b и с. Отложим от произвольной точки О вектор a: = а; от полученной точки А отложим вектор b: = b; отточки В — вектор с:  = с (рис. 11). По определению суммы — а + b и
= с (рис. 11). По определению суммы — а + b и  = (а + b) + с (рис. 12). С другой стороны, АС = b + с и, значит, ОС = а + (Ь + с) (рис. 13). Тем самым, для любых векторов a, b и с выполняется равенство
= (а + b) + с (рис. 12). С другой стороны, АС = b + с и, значит, ОС = а + (Ь + с) (рис. 13). Тем самым, для любых векторов a, b и с выполняется равенство
(а +b) + с = а + (b + с),
т. е. сложение векторов ассоциативно. Опуская скобки, можно говорить о сумме трех векторов и записывать ее так:
а + b + с.
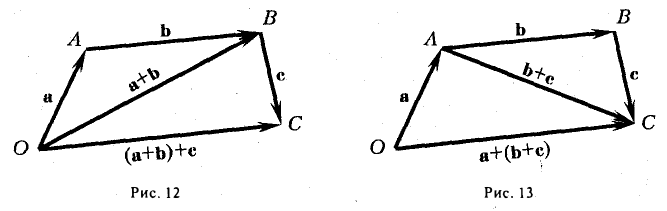
Аналогично определяется сумма любого числа векторов: это есть вектор, который замыкает ломаную, построенную из заданных векторов. На рис. 14 показан», как построить сумму семи векторов:

Приведенный способ сложения произвольного числа векторов называется правилом замыкающего ломаную.
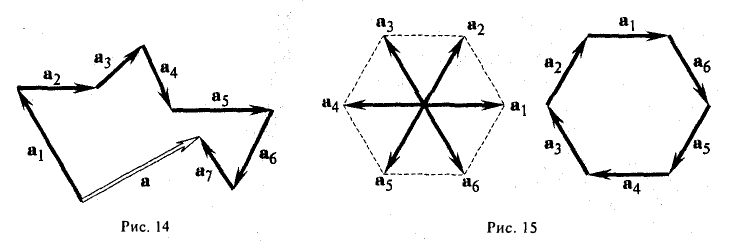
Пример:
Найти сумму векторов, идущих из центра правильного шестиугольника в его вершины.
По правилу замыкающего ломаную получаем

Умножение вектора на число
Определение:
Свободные векторы а и b называются коллинеарными, если определяющие их связанные векторы лежат на параллельных или на совпадающих прямых (рис. 16).
Обозначение: а||b.
Замечание:
Из определения следует, что если хотя бы один из векторов a и b нулевой, то они коллинеарны.
Если отложить коллинеарные векторы а и b от обшей точки О, = n, = Ь, то точки О, А н В будут лежать на одной прямой. При этом возможны два случая: точки А и В располагаются на этой прямой: 1) по одну сторону от точки О, 2) по разные стороны (рис. 17). В первом случае векторы а и b называются одинаково направленными, а во втором — противоположно направленными.
Если векторы имеют равные длины и одинаково направлены, то они равны. Пусть а — вектор, λ — вещественное число.
Определение:
Произведением вектора а на число λ называется вектор b такой, что
2) векторы а и b одинаково (соответственно, противоположно) направлены, если λ > 0 (соответственно, λ 
(здесь λ и μ — любые действительные числа, а и Ь — произвольные векторы).
Определение:
Вектор, длина которого равна единице, называется единичным вектором, или ортом, и обозначается а° (читается: а с нуликом), |а°| = 1.
Если а ≠ 0, то вектор
есть единичный вектор (орт) направления вектора а (рис. 18).
Координаты и компоненты вектора
Выберем в пространстве прямоугольную декартову систему координат. Обозначим через i, j, к единичные векторы (орты) положительных направлений осей Ox, Оу, Oz (рис. 19). Рассмотрим произвольный вектор п, начало которого лежит в начале координат О, а конец — в точке А. Проведем через точку А плоскости, перпендикулярные осям Ох, Оу и Oz. Эти плоскости пересекут координатные оси в точках Р, Q и R соответственно. Из рис. 20 видно, что

Векторы  коллинеарны соответственно единичным векторам i, j, k,
коллинеарны соответственно единичным векторам i, j, k,
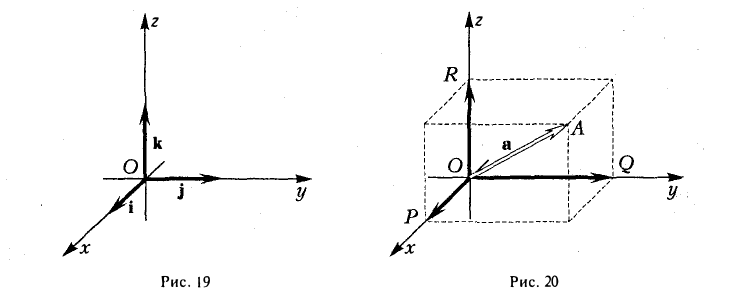
поэтому найдутся числа х, у, z такие, что

а = xi + yj + zk. (2)
Формула (2) называется разложением вектора а по векторам i, j, к. Указанным способом всякий вектор может быть разложен по векторам i, j, k.
Векторы i, j, к попарно ортогональны, и их длины равны единице. Тройку i, j, k называют ортонормированным (координатным) базисом (ортобазисом).
Можно показать, что для каждого вектора а разложение (2) по базису i, j, к единственно, т. е. коэффициенты х, у, z в разложении вектора а по векторам i, j, к определены однозначно. Эти коэффициенты называются координатами вектора а. Они совпадают с координатами х, у, z точки А — конца вектора а. Мы пишем в этом случае
а = <х, y,z>.
Эта запись означает, что свободный вектор а однозначно задастся упорядоченной тройкой своих координат. Векторы xi, yj, zk, сумма которых равна вектору а, называются компонентами вектора а.
Из вышеизложенного следует, что два вектора а = < х1, у1, z1 > и b = <х2, у2, z2> равны тогда и только тогда, когда соответственно равны их координаты, т. е.
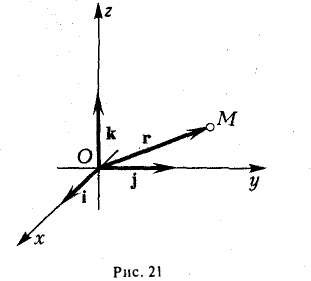
Радиус-вектором точки М(х,у, z) называется вектор г = xi + yj + zk, идущий из начала координат О в точку М (рис. 21).
Линейные операции над векторами в координатах


— при сложении векторов их координаты попарно складываются. Аналогично получаем



— при умножении вектора на число все его координаты умножаются на это число.
Пусть а = < х1, у1, z1>, b = < х2, у2, z2 > — коллинеарные векторы, причем b ≠ 0. Тогда а = μb, т.е.

Обратно, если выполняются соотношения (3), то а = μb, т. е. векторы a и b коллинеарны.
Таким образом, векторы а и b коллинеарны тогда и только тогда, когда их координаты пропорциональны.
Пример:
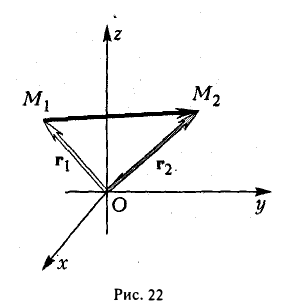
Найти координаты вектора  начало которого находится в точке М1 ( х1, у1, z1 ). а конец — в точке M2 (х2, у2, z2).
начало которого находится в точке М1 ( х1, у1, z1 ). а конец — в точке M2 (х2, у2, z2).
Из рис. 22 видно, что = r2 — r1 , где r2, r1 — радиус-векторы точек М1 и M2 соответственно. Поэтому

— координаты вектора М\Мг равны разностям одноименных координат конечной М2 и начальной М\ точек этого вектора.
Проекция вектора на ось
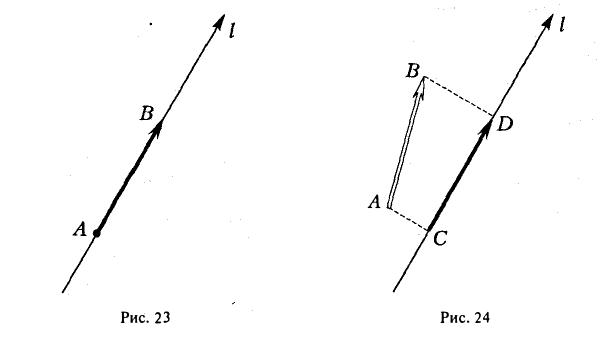
Рассмотрим на оси l ненулевой направленный отрезок АВ (рис.23). Величиной направленного отрезка АВ на оси l называется число, равное длине отрезка АВ, взятой со знаком «+», если направление отрезка АВ совпадаете направлением оси l, и со знаком «-», если эти направления противоположны.
Рассмотрим теперь произвольный вектор , определяемый связанным вектором АВ. Опуская из его начала и конца перпендикуляры на заданную ось l, построим на ней направленный отрезок CD (рис. 24).
Определение:
Проекцией вектора на ось l называется величина направленного отрезка CD, построенного указанным выше способом.
Обозначение: 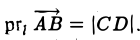
Основные свойства проекций
- Проекция вектора АВ на какую-либо ось l равна произведению длины вектора на косинус угла между осью и этим вектором (рис. 25)
- Проекция суммы векторов на какую-либо ось l равна сумме проекций векторов на ту же ось.


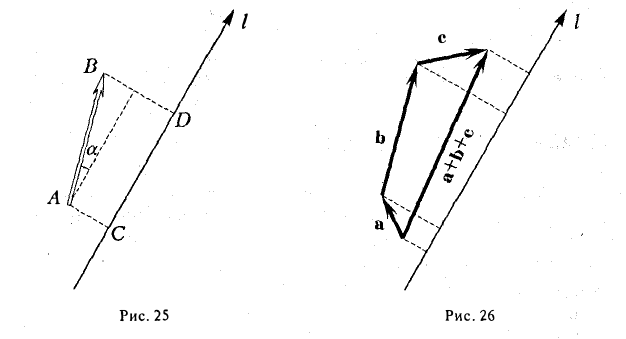
Скалярное произведение векторов
Пусть имеем два вектора a и b.
Определение:
Скалярным произведением вектора а на вектор b называется число, обозначаемое символом (а, b) и определяемое равенством

(1)
где φ, или в иной записи ( ), есть угол между векторами а и b (рис. 27 а).
), есть угол между векторами а и b (рис. 27 а).
Заметив, что |b| cos φ есть проекция вектора b на направление вектора а, можем написать

(рис. 27 б) и, аналогично,’ (2)

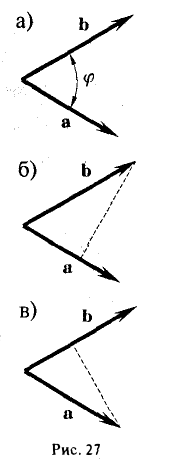
(рис. 27 в), т.е. скалярное произведение двух векторов равно длине одного из них, помноженной на проекцию на него другого вектора. В случае, если один из векторов а или b — нулевой, будем считать, что
(a, b) = 0.
Свойства скалярного произведения
- Скалярное произведение обращается в нуль в том и только в том случае, когда по крайней мере один из перемножаемых векторов является нулевым или когда векторы а и b ортогональны, a ⊥ b.
Это следует из формулы (1), определяющей скалярное произведение.
Поскольку направление нулевого вектора не определено, мы можем его считать ортогональным любому вектору. Поэтому указанное свойство скалярного произведения можно сформулировать так:

2. Скалярное произведение коммутативно:
(а, b) = (b, а).
Справедливость утверждения вытекает из формулы (I), если учесть четность функции cos φ: cos(- φ) = cos φ.
3. Скалярное произведение обладает распределительным свойством относительно сложения:
(а + b, с) = (а, с) + (b, c).

4. Числовой множитель А можно выносить за знак скалярного произведения
(λа, b) = (а, λb) = λ (а, b).
- Действительно, пусть λ > 0. Тогда

поскольку при λ > 0 углы () и (λ) равны (рис.28).
Аналогично рассматривается случай λ 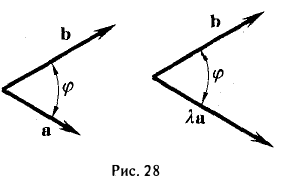
Замечание:
В общeм случае (а, b)c ≠ a(b, c).
Скалярное произведение векторов, заданных координатами
Пусть векторы а и b заданы своими координатами в ортонормированном базисе i, j, k:

Рассмотрим скалярное произведение векторов а и b:

Пользуясь распределительным свойством скалярного произведения, находим



То есть, если векторы а и b заданы своими координатами в ортонормированном базисе, то их скалярное произведение равно сумме произведений одноименных координат.
Пример:
Найти скалярное произведение векторов n = 4i — 2j + k и b = 6i + 3j + 2k.
(a, b) = 4 • 6 + (-2) • 3 + 1 • 2 = 20.
Скалярное произведение вектора на себя называется скалярным квадратом:
(а, а) = а 2 .
Применяя формулу (4) при b = а, найдем (5)
С другой стороны,

так что из (5) следует, что (6)
— в ортонормированном базисе длина вектора равна квадратному корню из суммы квадратов его координат.
Косинус угла между векторами. Направляющие косинусы
Согласно определению
(а, b) = |а| • |b| • cos φ,
где φ — у гол между векторами а и b. Из этой формулы получаем
(7)
(предполагается, что векторы а и b — ненулевые).

Пример:
Найти угол между векторами a = <2, -4,4,>и d = <-3,2,6>. Пользуясь формулой (8), находим

или, в координатной записи, (9)
где а есть угол, образованный вектором я с осью Ох. Аналогично получаем формулы
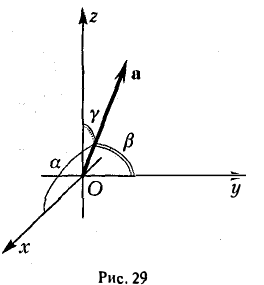
Формулы (9)-(11) определяют направляющие косинусы вектора а, т. е. косинусы углов, образуемых вектором n с осями координат (рис. 29).
Пример:
Найти координаты единичного вектора n°. По условию | n°| = 1. Пусть n° = zi+ yj+ zk. Тогда
Таким образом, координатами единичного вектора являются косинусы углов, образованных этим вектором с осями координат:


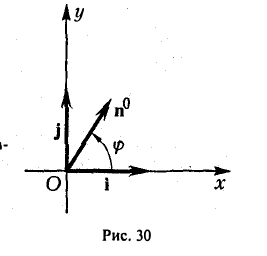
Пример:
Пусть единичный вектор n° ортогонален оси z:
(рис. 30). Тогда его координаты г и у соответственно равны
x=cos φ, y = sin φ.
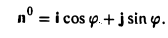
Векторное произведение векторов
Определение:
Векторным произведением вектора а на вектор b называется вектор, обозначаемый символом [a, b] (или a х b), такой, что
1) длина вектора [а, b] равна |а| • |Ь| • sin φ, где φ — угол между векторами а и b (рис.31);
2) вектор [а, b] перпендикулярен векторам а и b, т.е. перпендикулярен плоскости этих векторов;
3) вектор [а, Ь] направлен так, что из конца этого вектора кратчайший поворот от л к Ь виден происходящим против часовой стрелки (рис. 32).
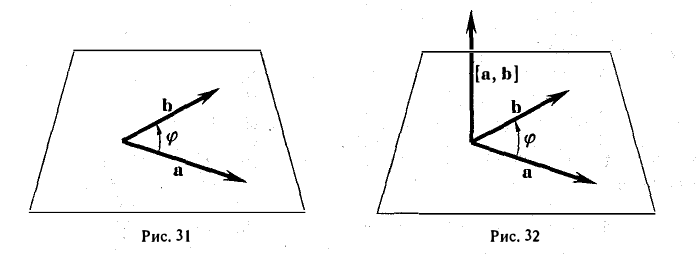
Иными словами, векторы я, b и [a, b] образуют правую тройку векторов, т.е. расположены так, как большой, указательный и средний пальцы правой руки. В случае, если векторы a и b коллинеарны, будем считать, что [a, b] = 0.
По определению длина векторного произведения (1)

численно равна площади  параллелограмма (рис.33), построенного на перемножаемых векторах a и b как на сторонах:
параллелограмма (рис.33), построенного на перемножаемых векторах a и b как на сторонах:
|[a, b]| = .
Свойства векторного произведения
- Векторное произведение равно нулевому вектору тогда и только тогда, когда по крайней мере один из перемножаемых векторов является нулевым или когда эти векторы коллинеарны (если векторы я и b коллинеарны, то угол между ними равен либо 0, либо тг).
Это легко получить из того, что |[a, b]| = |a| • |b| • sin φ.
Если считать нулевой вектор коллинеарным любому вектору, то условие коллинеарности векторов a и b можно выразить так

2. Векторное произведение антикоммутативно, т. е. всегда (2)

В самом деле, векторы [а, b] и [b, а] имеют одинаковую длину и коллинеарны. Направления же этих векторов противоположны, так как из конца вектора [a, b] кратчайший поворот от a к b будет виден происходящим против часовой стрелки, а из конца вектора [b, a] — почасовой стрелке (рис. 34).
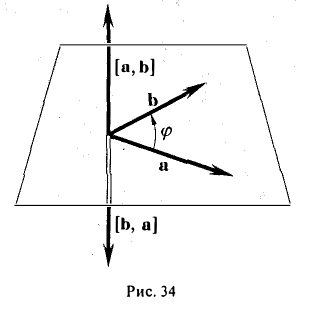
3. Векторное произведение обладает распределительным свойством по отношению к сложению

4. Числовой множитель λ можно выносить за знак векторного произведения

Векторное произведение векторов, заданных координатами
Пусть векторы a и b заданы своими координатами в базисе i,j, k: а = < х1, у1, z1>, b = < х2, у2, z2 >. Пользуясь распределительным свойством векторного произведения, находим (3)
Выпишем векторные произведения координатных ортов (рис. 35):



Поэтому для векторного произведения векторов a и b получаем из формулы (3) следующее выражение (4)

Формулу (4) можно записать в символической, легко запоминающейся форме, если воспользоваться определителем 3-го порядка: (5)
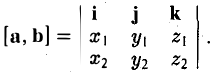
Разлагая этот определитель по элементам 1-й строки, получим (4). Примеры:
- Найти площадь параллелограмма, построенного на векторах а = i + j- k, b = 2i + j- k.
Искомая площадь = |[а, b]. Поэтому находим

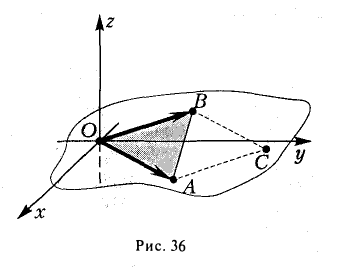
2. Найти площадь треугольника ОАВ (рис.36).
Ясно, что площадь S∆ треугольника ОАВ равна половине площади S параллелограмма О АС В. Вычисляя векторное произведение [a, b] векторов a= и b = , получаем
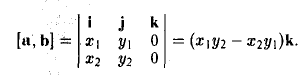

Замечание:
Векторное произведение не ассоциативно, т.е. равенство [[а, b], с] = [а, b,с]] в общем случае неверно. Например, при а = i, b = j. c= j имеем

Смешанное произведение векторов
Пусть имеем три вектора а, b и с. Перемножим векторы а и b векторно. В результате получим вектор [а, b). Умножим его скалярно на вектор с:
([a, b], с).
Число ([а, b], с) называется смешанным произведением векторов а, b, с и обозначается символом (а, b, с).
Геометрический смысл смешанного произведения
Отложим векторы а, b и с от общей точки О (рис. 37). Если все четыре точки О, А, В, С лежат в одной плоскости (векторы a, b и с называются в этом случае компланарными), то смешанное произведение ([а, b], с) = 0. Это следует из того, что вектор [а, b] перпендикулярен плоскости, в которой лежат векторы а и b, а значит, и вектору с.
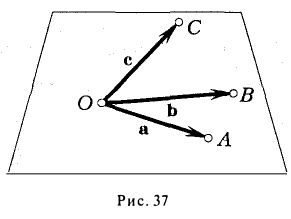
Если же точки О, А, В, С не лежат в одной плоскости (векторы a, b и с некомпланарны), построим на ребрах OA, OB и ОС параллелепипед (рис. 38 а). По определению векторного произведения имеем
где — площадь параллелограмма OADB, а с — единичный вектор, перпендикулярный векторам а и b и такой, что тройка а, b, с — правая, т. е. векторы a, b и с расположены соответственно как большой, указательный и средний пальцы правой руки (рис. 38 6).
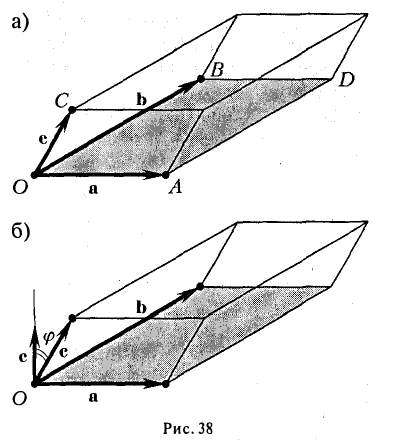
Умножая обе части последнего равенства справа скалярно на вектор с, получаем, что

Число ргe с равно высоте h построенного параллелепипеда, взятого со знаком « + », если угол ip между векторами с и с острый (тройка а, b, с — правая), и со знаком «-», если угол — тупой (тройка а, b, с — левая), так что

Тем самым, смешанное произведение векторов a, b и с равно объему V параллелепипеда, построенного на этих векторах как на ребрах, если тройка а, b, с — правая, и -V, если тройка а, b, с — левая.
Исходя из геометрического смысла смешанного произведения, можно заключить, что, перемножая те же векторы a, b и с в любом другом порядке, мы всегда будем О получать либо +V, либо -V. Знак произведения будет зависеть лишь от того, какую тройку образуют перемножаемые векторы — правую или левую. Если векторы а, b, с образуют правую тройку, то правыми будут также тройки b, с, а и с, а, b. В то же время все три тройки b, а, с; а, с, b и с, b, а — левые. Тем самым,
(а, b, с) = (b, с, а) = (с, a,b) = -(b, а, с) = -(а, с, b) = -(с, b, а).
Еще раз подчеркнем, что смешанное произведение векторов равно нулю тогда и только тогда, когда перемножаемые векторы а, b, с компланарны:
Смешанное произведение в координатах
Пусть векторы а, b, с заданы своими координатами в базисе i, j, k:

Найдем выражение для их смешанного произведения (а, b, с). Имеем


— смешанное произведение векторов, заданных своими координатами в базисе i, j, k, равно определителю третьего порядка, строки которого составлены соответственно из координат первого, второго и третьего из перемножаемых векторов.
Пример:
Проверить, компланарны ли векторы
Рассматриваемые векторы будут компланарны или некомпланарны в зависимости от того, будет равен нулю или нет определитель
Разлагая его по элементам первой строки, получим

Двойное векторное произведение
Двойное векторное произведение [а, [b, с]] представляет собой вектор, перпендикулярный к векторам а и [b, с]. Поэтому он лежит в плоскости векторов b и с и может быть разложен по этим векторам. Можно показать, что справедлива формула
[а, [b, с]] = b(а, с) — с(а, b).
Решение заданий и задач по предметам:
Дополнительные лекции по высшей математике:



Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
http://univerlib.com/analytic_geometry/vector_algebra/lines_and_planes_equations/
http://lfirmal.com/vektornaya-algebra-osnovnyie-ponyatiya-i-opredeleniya/