Векторное поле. Векторные линии и их дифференциальные уравнения







По этой ссылке вы найдёте полный курс лекций по математике:
Определение. Если в каждой точке M(x,y,z) пространства или части пространства определена векторная величина то говорят, что там задано векторное поле а. Задание векторного поля равносильно заданию ipex скалярных функций от трех переменных , Примерами векторных полей могут служить: силовое поле — поле некоторой силы F, поле скоростей v течения некоторой жидкости и др.
Для геометрической характеристики векторного поля служат векторные линии. Векторной линией векторного поля а называется кривая, касательная к которой в любой точке М имеет то же направление, что и вектор поля а в этой точке (рис. 7). В силовом поле векторные линии называются силовыми линиями’, в поле скоростей дви-женияжидкости векторные линии называются линиями тока. Рис. 7 3.1.
Дифференциальные уравнения векторных линий Пусть векторное поле определяется вектор-функцией ) — непрерывные функции переменных x, у, z, имеющие ограниченные частные производные первого порядка. Пусть — есть радиус-вектор текущей точки векторной линии векторного поля a (t — параметр). Из определения векторной линии следует, что вектор и вектор касательной к этой кривой должны быть коллинеарны в каждой точке векторной линии. Условием коллинеарности векторов является пропорциональность их координат:
Векторное поле Векторные линии и их дифференциальные уравнения Дифференциальные уравнения векторных линий Поток вектора через поверхность и его свойства Свойства потока вектора через поверхность Понятие ориентации поверхности Таким образом, мы получили для векторных линий систему дифференциальных уравнений в симметричной форме. Допустим, что нам удалось найти два независимых интеграла системы (2): . Система уравнений (3) определяет векторную линию как линию пересечения двух поверхностей. Произвольно меняя параметры с, и Сг, мы получаем семейство векторных линий как семейство с двумя степенями свободы.
Пример 1. Найти векторные линии векторного поля 4 Выписываем дифференциальные уравнения векторных линий, или Интегрируя эту систему, получим два уравнения — произвольные постоянные. Пересечение плоскостей у — С\х с параболическими цилиндрами дает двух параметрическое семейство векторных линий поля (рис.8). Олредрм*т . Векторное поле называется плоским, если все векторы а параллельны одной и той же плоскости и в каждой плоскости, параллельной указан ной, векторное поле одно и то же.
Посмотрим, как плоское векторное поле описывается в координатах.
Если указанную в определении плоскость (или любую ей параллельную) принять за плоскость хОу, то векторы плоского поля не будут содержать компоненты по оси Oz и координаты векторов не будут зависеть от z: Дифференциальные уравнения векторныхл иний плоского поля можно записать в следующем виде Отсюда видно, что векторные линии плоского поля являются плоскими кривыми, лежащими в плоскостях, параллельных плоскости хОу.
Возможно вам будут полезны данные страницы:
Пример 2. Найти векторные линии магнитного поля бесконечно длинного прямого провода. ^ Предположим, что проводник направлен вдоль оси Oz и по нему течет ток силы J, т.е. вектор тока Тогда вектор напряженности Н магнитного поля определяется по формуле — радиус-вектор точхи М, р — расстояние от оси провода до точки М. Раскрывая векторное произведение (6), получим Дифференциальные уравнения векторных линий: Отсюда х = const, = или . Окончательно имеем т.е. векторные линии являются офужносгями с центрами на оси О г (рис.9). Пример 3.
Найти векторные линии поля сил тяготения, образованного притягивающей материальной то*«ой массы ш, расположенной в начале координат. Дифференциальные уравнения векторных линий: стсуда, умножая каждую из дробей на , получим Чтобы получить уравнения векторных линий в параметрической форме, приравняем каждую из дробей величине у. Имеем Это — полупрямые, выходящие из начала координат. Чтобы из семейства векторных линий выделить одну, надо задать точку ), через которую эта векторная линия должна проходить, и по координатам заданной точки определить величины.
Пусть, например, точка А/о имеет координаты . Уравнение векторной линии, проходящей через точку, можно записать так: . Сама точка Л/о получается при значении параметра § 4. Поток вектора через поверхность и его свойства Рассмотрим сначала частный случай поля скоростей v течения жидкости. Выделим в поле некоторую поверхность Потоком жидкости через поверхность Е называется количество жидкости, протекающее через поверхность Е за единицу времени.
| Этот поток легко вычислить |
если скорость течения постоянна (v = const), а поверхность £ —плоская. В этом случае поток жидкости равен объему цилиндрического тела с параллельными основаниями и образующими длины |v|, так как за единицу времени кажд ая частица перемещается на величину v (рис. 10), где S — площадь основания, — высота цилиндра и n — нормаль к его основанию, Итак, при постоянной скорости v поток жидкости через плоскую поверхность Е равен Если скорость v изменяется непрерывно, а поверхность Е — гладкая, то можно разбить поверхность Е на столь малые части , чтобы каждую часть Е* можно было приближенно считать плоской и вектор v на ней постоянным.
Так как поток жидкости через поверхность Е равен сумме потоков жидкости через все ее части Е*, то мы получаем для вычисления потока приближенную формулу Векторное поле Векторные линии и их дифференциальные уравнения Дифференциальные уравнения векторных линий Поток вектора через поверхность и его свойства Свойства потока вектора через поверхность Понятие ориентации поверхности где п — общее число частей Efc, на которые разбита поверхность Е, Рк — точка, лежащая на fc-ой части, Аак — площадь части Е* поверхности, означает скалярное произведение векторов в точке *(рис. 11).
Назовем потоком жидкости через поверхность Е предел суммы (2) при стремлении к нулю наибольшего из . диаметров площадок Е*, где d — наибольший из диаметров частей . Интеграл (3), определяющий поток жидкости, берется от скалярной функции (v, п°) по площади поверхности Е. Понятие потока произвольного вектора а через поверхность Е вводится по аналогии с введенным выше понятием потока жидкости через поверхность. Определение.
Тогда вектор напряженности поля в любой точке Р будет равен где ч — величина заряда (массы), г ОР — радиус-вектор точки Р. Требуется найти поток вектора напряженности Е через Sn — сферу радиуса R с центром в начале координат. Так как направление нормали к сфере совпадает с направлением радиус-вектора г, и поэтому На сфере 5д радиуса R имеем . Поэтому поток вектора чероз Sn равен 4.1. Свойства потока вектора через поверхность 1. Линейность. где А и ц — постоянные числа. 2. Аддитивность. Если поверхность Е разбита кусочно-гладкой кривой на две части , то поток через поверхность Е равен сумме потоков через поверхности Ei и Е2, Это свойство позволяет распространить понятие потока на кусочно-гладкие поверхности Е.
Понятие ориентации поверхности Взяв, к примеру, цилиндрическую поверхность, замечаем, что если в некоторой ее точке М выбрать определенный (один из двух) единичный вектор нормали и непрерывно перемещаться затем по поверхности вместе с соответствующим вектором нормали по любому пути, не переходящему через край поверхности, то при возвращении в точку М единичный вектор нормали совпадает с исходным (рис. 12). Вместе с тем, существуют поверхности, для которых это не так.
Примером такой поверхности может служить лист Мёбиуса (рис. 13). Существует путь (отмеченная на рисунке пунктиром средняя линия листа), перемещаясь по которому, мы возвратимся в начальную точку с единичным вектором нормали, противоположным исходному. Описанное свойство разбивает все поверхности на два класса — двусторонние, или ориентируемые (плоскость, сфера, поверхность куба и т. п.), и односторонние, или неориентируемые (лист Мёбиуса). 3. Зависимость потока от ориентации поверхности (от ориентации вектора нормали к поверхности). Понятие потока вводится только для двусторонних поверхностей.
Будем считать, что если в одной точке такой поверхности направление вектора нормали уже выбрано, то Рис. 13 в любой другой ее точке берется тот вектор нормали, который получается из выбранного при непрерывном перемещении точки по поверхности (без перехода через границу). В частности, на замкнутой поверхности во всех точках берется либо внешняя нормаль, либо внутренняя (внутренняя нормаль направлена внутрьтела, ограниченного замкнутой поверхностью).
Обозначим через ту сторону поверхности £, на которой выбран вектор нормали п+ = п, а через Е
— сторону поверхности Е, на которой берется вектор нормали (п_ = -п). Тогда получим (7) где . Таким образом, при изменении ориентации поверхности (при изменении направления вектора нормали п° к поверхности Е) поток вектора меняет знак на противоположный.
Пример 2. Вычислить поток радиус-вектора через поверхность прямого кругового цилиндра высоты Н с радиусом основания R и осью Ог. Поверхность состоит из трех частей: боковой поверхности £j, верхнего основания £2 и нижнего основания £3 цилиндра. Искомый поток П в силу свойства аддитивности равен — потоки данного поля через и соответственно. На боковой поверхности цилиндра вектор внешней нормали п? параллелен плоскости хОу, и поэтому (см. рис. 14).
Следовательно, Векторное поле Векторные линии и их дифференциальные уравнения Дифференциальные уравнения векторных линий Поток вектора через поверхность и его свойства Свойства потока вектора через поверхность Понятие ориентации поверхности На верхнем основании £2 вектор нормали параллелен оси Oz, и поэтому можно положить п§ = к-Тогда имеем так что На нижнем основании вектор г перпендикулярен к вектору нормали п» = -к. Поэтому Здесь символ означает двойной интеграл по замкнутой поверхности,
Присылайте задания в любое время дня и ночи в ➔ 

Официальный сайт Брильёновой Натальи Валерьевны преподавателя кафедры информатики и электроники Екатеринбургского государственного института.
Все авторские права на размещённые материалы сохранены за правообладателями этих материалов. Любое коммерческое и/или иное использование кроме предварительного ознакомления материалов сайта natalibrilenova.ru запрещено. Публикация и распространение размещённых материалов не преследует за собой коммерческой и/или любой другой выгоды.
Сайт предназначен для облегчения образовательного путешествия студентам очникам и заочникам по вопросам обучения . Наталья Брильёнова не предлагает и не оказывает товары и услуги.
Нормальная система дифференциальных уравнений. Векторная запись нормальной системы.
Общий вид дифференциального уравнения первого порядка есть F(x,y,y¢)=0. Если это уравнение можно разрешить относительно у¢, т.е. записать в виде у¢=f(x,y), то говорят, что уравнение записано в нормальной форме (или в форме Коши).
Рассмотрим геометрическую трактовку нахождения решений уравнения. Возьмём некоторую точку (x0,y0) из области определения D функции f(x,y). Пусть у=j(х) – интегральная кривая, проходящая через эту точку. Из уравнения вытекает, что j¢(х0)=(х0,у0). Таким образом, угловой коэффициент касательной к интегральной кривой, проходящей через точку (х0,у0) равен (прих=х0) числу f(х0,у0).
Построим теперь для каждой точки (х0,у0) из области определения прямую, проходящую через эту точку и имеющую угловой коэффициент, равный f(х0,у0). В этом случае принято говорить, что эта прямая определяет направление в точке (х0,у0), а на множестве D задано поле направлений.
Если каждое уравнение, входящее в систему, является дифференциальным, т.е. имеет вид соотношения, связывающего неизвестные функции и их производные, то говорят о системе дифференциальных уравнений. Так система дифференциальных уравнений первого порядка с двумя неизвестными функциями записывается обычно в виде
На системы дифференциальных уравнений естественным образом обощается постановка задачи Коши для одного уравнения. Например, в случае данной системы задача Коши состоит в нахождении решения х1(t),x2(t), удовлетворяющих начальным условиям х1(t0)= х1 0 , x2(t0)= x2 0 , где t0, х1 0 , x2 0 – заданные числа. Для случая системы может быть доказана теорема существования и единственности решения задачи Коши, аналогичная теореме для одного уравнения.
Теорема существования и единственности решения задачи Коши.
Если в некоторой окрестности точки (х0,у0) функция f(х,у) определена, непрерывна и имеет непрерывную частную производную f¢y, то существует такая окрестность точки (х0,у0), в которой задача Коши имеет решение, притом единственное. (приводится без доказательства)
Задача о нахождении решений дифференциального уравнения у¢=f(x,y), удовлетворяющих начальному условию у(х0)=у0 , называется задачей Коши.
К системам дифференциальных уравнений первого порядка в известном смысле сводятся уравнения (и системы уравнений) любого порядка. Пример.
Пусть дано уравнение у¢¢¢=f(x,y,y¢,y¢¢). Если обозначить функцию y¢и y¢¢ соответственно через m и n, то уравнение можно заменить системой
состоящей из трёх уравнений первого порядка с тремя неизвестными функциями.
Векторная запись нормальной системы. (со слов Гончаренко)
Пусть дана нормальная система из n уравнений с n неизвестными.
Представим набор решений как вектор х= (x1,x2,…,xn) в проистранстве R n .
Функцию также можно записать в векторном виде f=(f(x),f(x),…,f(x)).
Векторная запись всей системы будет выглядеть следующия образом:
Формы записи дифференциальных уравнений
Стационарные линейные непрерывные САУ наиболее часто описываются линейными дифференциальными уравнениями с постоянными коэффициентами:

 . (2.9)
. (2.9)
В этом уравнении  — выходная переменная (управляемая (регулируемая) величина) САУ,
— выходная переменная (управляемая (регулируемая) величина) САУ,  — входная переменная САУ. Правая часть уравнения (3.1) записана относительно управляющего воздействия
— входная переменная САУ. Правая часть уравнения (3.1) записана относительно управляющего воздействия  , однако используются формы записи уравнения относительно задающего воздействия
, однако используются формы записи уравнения относительно задающего воздействия  , возмущения
, возмущения  или нескольких входных воздействий.
или нескольких входных воздействий.
Применяется также операторная форма записи уравнения (2.9):

 . (2.10)
. (2.10)
В этом уравнении через «  » обозначен оператор дифференцирования
» обозначен оператор дифференцирования  .
.
Заметим, что по сложившейся традиции символ « » используется также в преобразованиях Лапласа и Карсона-Хевисайда, но является комплексным числом  .
.
За многолетнюю историю развития ТАУ сложились традиции формальной записи линейных дифференциальных уравнений, описывающих стационарные САУ. В учебной литературе по ТАУ они рассматриваются как стандартные формы записи дифференциальных уравнений. Рассмотрим эти формы записи на примере линейной системы второго порядка:

 (2.11)
(2.11)
или в операторной форме

 . (2.12)
. (2.12)
Первая стандартная символическая форма записи уравнения (2.11) имеет следующий вид:
 , (2.13)
, (2.13)
где  ;
;  ;
;  ;
;  .
.
Форма (2.13) представляет собой операторно-структурное описание системы, т.е. в виде операторов звеньев, составляющих структурную схему системы (далее эти понятия разъясняются), и связей между ними. В этой форме  — постоянные времени звена, измеряемые в секундах;
— постоянные времени звена, измеряемые в секундах;  — передаточный коэффициент звена.
— передаточный коэффициент звена.
Из изложенного выше следует, что уравнение (2.9) в этой форме перепишется в следующем виде:

 , (2.14)
, (2.14)
где  ;
;  ;
;  .
.
Во второй стандартной форме записи дифференциального уравнения используется передаточная функция системы, которая для рассматриваемого примера (2.11) имеет вид
 .
.
Передаточная функция САУ, поведение которой во времени описывается уравнением (2.9), имеет следующий вид :


 .
.
В формуле (2.15) через  и
и  обозначены изображения (по Лапласу) выходной и входной переменных САУ при нулевых начальных условиях и равенстве нулю внешних возмущений, а через
обозначены изображения (по Лапласу) выходной и входной переменных САУ при нулевых начальных условиях и равенстве нулю внешних возмущений, а через  и
и  — полиномы относительно комплексной переменной
— полиномы относительно комплексной переменной  .
.
Вторая стандартная форма записи дифференциального уравнения имеет следующий вид:
 или
или  . (2.16)
. (2.16)
В (2.16)  и являются полиномами (символическими) относительно оператора .
и являются полиномами (символическими) относительно оператора .
Из сравнения первой и второй стандартных форм записи дифференциальных уравнений следует, что с математической точки зрения различие между этими формами весьма несущественно и состоит лишь в различном представлении коэффициентов уравнений. В ТАУ принято называть уравнения вида (2.9) — (2.14), (2.16) уравнениями типа «вход-выход».
Третья стандартная форма записи дифференциального уравнения принципиально отличается от форм записи, описанных выше. В этой форме записи используются переменные состояния. Отметим, что понятие «состояние» является базовым в современной ТАУ (СТАУ). Переменные состояния — это промежуточные переменные системы (рис.2.2), число которых равно ее порядку  . В общем случае входные
. В общем случае входные  и выходные
и выходные  переменные могут быть векторными величинами размерности
переменные могут быть векторными величинами размерности  и
и  соответственно.
соответственно.
Рис.2.2 — Состояние системы | Переменные состояния называют также координатами состояния, так как их совокупность задает вектор состояния  . . |
Множество возможных положений этого вектора образует векторное пространство  , называемое пространством состояний системы. В переменных состояния САУ описывается векторно-матричным уравнением
, называемое пространством состояний системы. В переменных состояния САУ описывается векторно-матричным уравнением
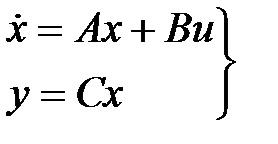 , (2.17)
, (2.17)
где  — квадратная матрица коэффициентов (ее называют также собственной параметрической матрицей системы);
— квадратная матрица коэффициентов (ее называют также собственной параметрической матрицей системы);  — входная матрица (матрица управления) системы;
— входная матрица (матрица управления) системы;  — выходная матрица системы;
— выходная матрица системы;
 — вектор переменных состояния — внутренних координат системы;
— вектор переменных состояния — внутренних координат системы;
 — вектор входных переменных (управляющих и возмущающих);
— вектор входных переменных (управляющих и возмущающих);
 — вектор наблюдаемых или выходных переменных; размерности матриц
— вектор наблюдаемых или выходных переменных; размерности матриц  ,
,  ,
,  , соответственно, (
, соответственно, (  ), (
), (  ), (
), (  ).
).
Процессы в САУ в свободном движении (без внешних воздействий) согласно уравнению (2.17) описываются векторно-матричным уравнением  с характеристическим уравнением
с характеристическим уравнением  , где
, где  — единичная матрица, или в развернутом виде системой дифференциальных уравнений
— единичная матрица, или в развернутом виде системой дифференциальных уравнений

с характеристическим уравнением
 . (2.18)
. (2.18)
Эти уравнения при определенных начальных условиях дают возможность изучить процессы в системе путем их решения численными методами с использованием ЭВМ.
Разработаны различные способы перехода от уравнений типа «вход-выход» к уравнениям состояния вида (2.17) и наоборот. Один из наиболее распространенных способов состоит в следующем. Пусть САУ описывается уравнением (2.9). Введем обозначения
 ,
,  , . ,
, . ,  ,
,
 .
.
С помощью этих обозначений преобразуем уравнение (3.1) к следующему виду:
 , (2.19)
, (2.19)
где  ;
;  ;
;
 ;
;  .
.
В нашем примере и  являются скалярными величинами. В общем случае (2.17) — это, соответственно, вектор наблюдаемых или выходных переменных и вектор входных переменных (управляющих и возмущающих), поэтому в (2.19) матрицы
являются скалярными величинами. В общем случае (2.17) — это, соответственно, вектор наблюдаемых или выходных переменных и вектор входных переменных (управляющих и возмущающих), поэтому в (2.19) матрицы  и
и  выродились в вектор-столбец и вектор-строку соответственно.
выродились в вектор-столбец и вектор-строку соответственно.
Система уравнений (2.19) представляет собой описание линейной непрерывной системы в пространстве состояний  . Уравнения (2.19) с матрицей
. Уравнения (2.19) с матрицей  называют уравнениями в форме Фробениуса.
называют уравнениями в форме Фробениуса.
Если  , то
, то
 ;
;  .
.
Форма уравнений (2.19) с подобными матрицами и  называется в ТАУ канонической формой фазовой переменной.
называется в ТАУ канонической формой фазовой переменной.
Задание 1
1.1. По дифференциальному уравнению системы:

Для каждого типового звена 1 – 12 (таблицы 2.1) в соответствии с его параметрами вывести дифференциальное уравнение, операторное уравнение, и выражение передаточной функции.
1.2Математическое описание типового звена системы автоматического регулирования записать в трех формах записи дифференциальных уравнений.
Первая стандартная символическая форма операторно-структурное описание системы, т.е. в виде операторов звеньев.
Во второй стандартной форме записи дифференциального уравнения используется передаточная функция системы.
Третья стандартная форма записи дифференциального уравнения — переменные состояния.
Таблица 2.1 – Исходные коэффициенты
| № п.п. | Наименование звена | а 0 | а 1 | а 2 | b0 | b1 | Примечания |
| Безынерционное (пропорциональное) | к | ||||||
| Инерционное 1-го порядка (апериодическое) | Т | k | |||||
| Инерционное 2-го по- рядка (апериодическое) | Т2 2 | Т1 | k | Т1³2Т2 | |||
| Инерционное 2-го по- рядка (колебательное) | Т2 2 | Т1 | k | Т1 T |
Задание 2
2.1Для каждого звена (таблицы 2.2) по его передаточной функции записать дифференциальное уравнение.
2.2 Математическое описание типового звена системы автоматического регулирования записать в трех формах записи дифференциальных уравнений.
| Вар | Передаточная функция | Значения параметров передаточной функции |
 | а0=1; а1=5; а2 =1,2; а3 =0,9; а4=0,5;в0=1;в1=3; в2=0,8;в3=0,3 | |
 | а0=1; а1=5; а2 =1,2; а3 =0,9; в0=1;в1=3; в2=0,8 | |
 | а0=1; а1=5; а2 =1,2; в0=1; в1=3; | |
 | а0=1; а1=5; а2 =1,2; а3 =0,9; а4=0,5; в0=10 | |
 | а0=1; а1=5; а2 =1,2; а3 =0,9; в0=10 | |
 | а0=1; а1=5; а2 =1,2; а3=0,9;а4=0,5;в0=1;в1=3; в2=0,8;в3=0,3 | |
 | Т0=2; Т1=4; Т2=1,1;Т3=0,9 | |
 | Т0=2; Т1=4; Т2=1,1;Т3=1,1;Т4=,9 | |
 | К= 10;Т1=4; Т2=1,1;Т3=0,9 | |
 | К= 10; Т2=1,1;Т3=0,9 Т4=0,9 | |
 | Т0=0,7; Т1=3;Т2=1,2;Т3=0,9;Т4=0,8;Т5=0,5 | |
 | К=10 Т0=0,7; Т1=3;Т2=1,2;Т3=0,9;Т4=0,8;Т5=0,5; |
Задание №3
3.1 Для заданной схемы необходимо составить операторное уравнение для каждого элемента схемы САУ.
3.2. Определить входные и выходные величины каждого элемента, и определить передаточные функции отдельных элементов функциональной схемы.
Формы записи дифференциальных уравнений.
3.3Сформировать математическое описание систем автоматического регулирования в виде структурной схемы в буквенном и числовом обозначениях.
3.4 Сформировать математическое описание систем автоматического регулирования в виде третьей стандартной формы записи дифференциального уравнения — В переменных состояния САУ описываемых векторно-матричным уравнением.
Схема, показанная на рисунке 2.2, представляет собой САР температуры в помещении. Объектом регулирования (ОР) в данной системе является помещение, для которого регулируемая величина — температура внутри помещения Ө, регулирующее (управляющее) воздействие — температура воздуха ӨК, поступающего из калорифера, возмущающее воздействие — изменения внешних факторов f(в общем случае изменение температуры атмосферного воздуха, его влажности, скорости ветра). При исследовании системы в качестве основного возмущения следует рассматривать изменение температуры окружающего воздуха.
Воспринимающим органом — ВО (датчиком, чувствительным элементом) в данной САР является терморезистор RД, включенный в мостовую схему, обеспечивающую с помощью резистора RОзадание необходимого значения температуры в помещении и выполняющую также функции сравнивающего органа — СО (элемента сравнения). Усиление сигнала разбалансаΔU(сигнала рассогласования) измерительной мостовой схемы обеспечивается посредством усилителя. Усиленный сигнал Uобеспечивает вращение двухфазного исполнительного двигателя, который изменяет перемещение клапана (заслонки) на трубопроводе подачи парав калорифер, чем достигается изменение температуры воздуха на входе калорифера — регулирующего воздействия на объектерегулирования.
 |
1 — помещение; 2 — теплообменник (калорифер), 3 — измерительная мостовая схема; 4 — двухфазный исполнительный двигатель, 5 — дифференциальный магнитный усилитель; 6 — клапан (заслонка)
Рис. 2.2. Схема САР температуры
Динамические свойства объекта регулирования и элементов системы описываются следующими уравнениями:

где То, Т2, Т3, Т4 — постоянные времени, с; Ө — значение температуры воздуха в помещении, °С, Ө к — значение температуры воздуха на выходе калорифера, °С; к, к1, к2, к3, к4— коэффициенты передачи; f— возмущающее воздействие на объекте регулирования; Uд —падение напряжения на термодатчике, В; ΔU— напряжение на выходе мостовой схемы (сигнал рассогласования), В; μ. — линейное перемещение клапана, см; U0 — задающий сигнал, В.
Значения параметров элементов САР по вариантам даны в таблице 2.3.
Заданное значение температуры в помещении Ө = 20 °С.
Значения параметров элементов САР
| Вариант | Т0, с | Т2, с | к | к1, В/ 0 С | к4 | к2, см/(В*с) | f,. 0 С | К3, °С/см |
| 0,06 | 0,2 | 0,2 | 0,002 | -11 | ||||
| 0,07 | 0,25 | 0,3 | 0,001 | |||||
| 0,08 | 0,3 | 0,25 | 0,0018 | -8 | ||||
| 0,09 | 0,35 | 0,2 | 0,002 | |||||
| 0,10 | 0,4 | 0,2 | 0,002 | -5 | ||||
| 0,50 | 0,18 | 0,25 | 0,003 | |||||
| 0,055 | 0,19 | 0,4 | 0,0035 | |||||
| 0,06 | 0,17 | 0,4 | 0,0025 | -15 | ||||
| 0,06 | 0,25 | 0,2 | 0,0016 | |||||
| 0,08 | 0,4 | 0,15 | 0,0014 | -18 |
Примечание. Для всех вариантов постоянные времени Т3 = 20 с, Т4=0,5 с.
Схема САР, приведенная на рисунке 2.3, обеспечивает стабилизацию угловой скорости электродвигателя постоянного тока который совместно с рабочим механизмом является объектом регулирования. Регулируемая величина объекта — угловая скорость двигателя ω, регулирующее воздействие — напряжение Uг,подаваемое от генератора на якорь двигателя. Возмущающее воздействие на объекте регулирования — момент сопротивления Мс, создаваемый рабочим механизмом. Угловая скорость двигателя ωконтролируется тахогенератором, сигнал которого Uтг, пропорциональный скорости, сравнивается с задающим сигналом U3. Сигнал рассогласования ΔU = U3— UTг усиливается магнитным усилителем и воздействует на обмотку возбуждения генератора, выполняющего функции исполнительного органа (элемента).
Динамические свойства объекта регулирования и элементов САР описываются следующими уравнениями:

гдеТд, Ту, Tv — постоянные времени, с; Кд, Км, Ктг, Ку, Кг — коэффициенты передачи соответствующих элементов систем

1 — задающий потенциометр; 2 — магнитный усилитель; 3 — генератор; 4 — двигатель; 5 — тахогенератор; 6 — рабочий механизм
Рис. 2.3. Схема САР угловой скорости электродвигателя
Значения параметров элементов САР
| Вариант | Ту, с | Ку | Кг | Тг, с | Кд, рад/ с*В | Тд, с | Км рад/ с*Н* м | Мс, Н*м | Кгг, В*с/ рад |
| 0,020 | 4,0 | 2,0 | 0,10 | 1,0 | 0,5 | 0,02 | 1,0 | ||
| 0,015 | 5,0 | 1,8 | 0,12 | 0,95 | 0,60 | 0,03 | 0,9 | ||
| 0,018 | 4,5 | 1,7 | 0,15 | 0,85 | 0,70 | 0,04 | |||
| 0,022 | 6,0 | 1,5 | 0,20 | 0,8 | 0,80 | 0,05 | 0,7 | ||
| 0,020 | 5,8 | 1,6 | 0,16 | 1,5 | 0,65 | 0,06 | 0,6 | ||
| 0,025 | 4,2 | 2,0 | 0,25 | 1,4 | 0,75 | 0,07 | 0,5 | ||
| 0,020 | 3,5 | 2,7 | 0,22 | 1,3 | 0,80 | 0,08 | 0,4 | ||
| 0,028 | 6,2 | 2,1 | 0,30 | 1,2 | 0,75 | 0,02 | 0,5 | ||
| 0,018 | 6,5 | 2,3 | 0,16 | 1,0 | 0,50 | 0,013 | 0,6 | ||
| 0,014 | 7,0 | 2,5 | 0,20 | 1,25 | 0,80 | 0,015 | 0,7 |
Значения параметров объекта регулирования и элементов системы для различных вариантов указаны в таблице 2.4. Заданное значение угловой скорости ω = 40 рад/с.
На рисунке 2.4 изображена схема САР давления Р в ресивере (воздухосборнике) 1, который является в данной системе объектом регулирования. Давление в ресивере регулируется посредством изменения количества воздуха Q, зависящего от положения заслонки 2, т.е. от ее линейного перемещения Х3, которое можно рассматривать как регулирующее воздействие на входе объекта регулирования. Внешним возмущением, вызывающим отклонение регулируемой величины — давления Р, является изменение расхода сжатого воздуха Qc.

Рис 2.4 Схема САР давления Р в ресивере
Давление в данной системе контролируется с помощью сильфонного датчика 3, выходная величина которого — перемещение Хс сильфона 5 однозначно зависит от разности сил ΔF= F0— Fp, где Fp— сила, создаваемая давлением Р, F0— сила натяжения пружины 6, которое можно изменять винтом 7.
Перемещение сильфона Хсс помощью потенциометрического преобразователя 4 преобразуется в электрический сигнал — напряжение U, которое усиливается электронным усилителем 8. Выходной сигнал усилителя Uyуправляет электромагнитным приводом 9, связанным с заслонкой 2,
В данной САР сильфонный датчик выполняет функции воспринимающего, задающего и сравнивающего органов. Как воспринимающий орган он контролирует давление Р, преобразуя его в силу Fp. Задание требуемого давления в ресивере обеспечивается посредством силы F0. Как сравнивающий орган сильфон обеспечивает сравнение величин F0 и Fp, в результате чего, как отмечалось ранее, получается ΔF= F0 — Fp — сигнал рассогласования.
Динамические свойства объекта регулирования и элементов САР описываются следующей системой уравнений:

| заслонкой |
Физическая сущность переменных, входящих в уравнения, отражена выше в описании схемы САР. Параметры T0, T1, T2, T3 и К0, Кq, Кв, Кc, Кп, Ку, К3 — соответственно постоянные времени и коэффициенты передачи. Их размерности и значения по вариантам даны в таблице 2.5. Требуемое значение давления Р = 500 кПа.
Значения параметров элементов САР
| Вариант | Т0,с | Ко КПа/мм | Т1,с | Т2,с | Кс мм/Н | Кв Н/кПа | КQ, Кпа*с/м 3 | ΔQC, м3/с | Кп В/мм | Ку | Т3 | К3 Мм/В |
| 1,3 | 0,2 | 0,045 | 2,5 | 0,5 | 0,1 | 0,2 | 0,01 | |||||
| 0, 25 | 0 ,04 | 2,5 | 0,5 | -0, 2 | 0,2 | 0,01 | ||||||
| 0,6 | 3,5 | 0,34 | 0,022 | 2,5 | 0,5 | 0,3 | 0,2 | 0,01 | ||||
| 4,8 | 0,25 | 0,035 | 2,5 | 0,5 | -0,15 | 0,2 | 0,01 | |||||
| 0,7 | 4,5 | 0,3 | 0,04 | 2,5 | 0,5 | 0,12 | 0, 9 | 0,01 | ||||
| 0,8 | 3,5 | 0,18 | 0, 025 | 2 ,5 | 0,5 | -0,2 | 0 ,2 | 0,01 | ||||
| 0,4 | 4,4 | 0,25 | 0,03 | 2,5 | 0,5 | 0,11 | 0,2 | 0,01 | ||||
| 0,65 | 5,5 | 0,2 | 0,02 | 2,5 | 0,5 | -0,12 | 0,2 | 0,01 | ||||
| 0, 7 | 0, 4 | 0 ,025 | 2,5 | 0,5 | 0,14 | 0,2 | 0,01 | |||||
| 0,55 | 0,25 | 0,035 | 2,5 | 0,5 | -0,14 | 0,2 | 0,01 |
На электрических станциях при производстве электроэнергии предъявляют определенные требования к стабильности частоты f генерируемой ЭДС. Частота f однозначно определяется угловой скоростью ω рабочего колеса гидротурбины. В связи с этим гидротурбины на электростанциях оснащают САР угловой скорости. На рисунке 2.5 показана схема одного из вариантов такой САР.
В данной системе объектом регулирования является гидротурбина 1, регулируемой величиной — угловая скорость ω .Она при постоянном расходе воды изменяется в зависимости от нагрузки на валу турбины, т. е. от мощности Р, которая потребляется от генератора 2 (с увеличением мощности угловая скорость снижается, с уменьшением — возрастает). Таким образом, мощность Р является внешним возмущающим воздействием на объекте регулирования. Для регулирования угловой скорости предусмотрена заслонка 3, с помощью которой изменяется расход воды через турбину. Он однозначно зависит от вертикального перемещения X заслонки. Следовательно, перемещение заслонки X можно рассматривать как регулирующее воздействие объекта регулирования. Угловая скорость ω контролируется посредством тахогенератора 4, ЭДС Е которого сравнивается с задающим напряжением U0. Сигнал рассогласования Δ U через усилитель 5 управляет посредством электродвигателя 6 и редуктора 7 заслонкой 3.
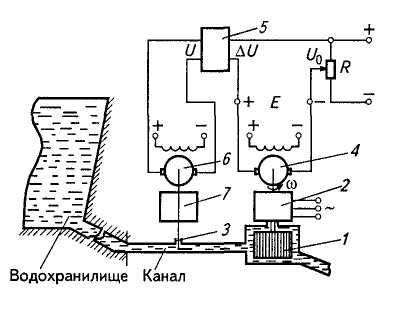 |
Рис. 2.5 Схема САР угловой скорости рабочего колеса гидротурбины
Динамические свойства элементов САР описываются следующей системой уравнений:
http://sdamzavas.net/4-58020.html
http://megaobuchalka.ru/5/12593.html