Метрика. Метрический тензор.
Метрика (от слова мерить), называемая также метрическим тензором, позволяет находить длины и таким образом несет ответственность за всю геометрию пространства.
Длину \( \displaystyle s\) вектора можно найти через его декартовы координаты по теореме Пифагора: 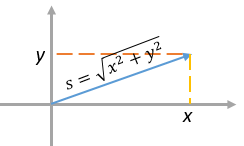
Обычно говорят о квадрате длины, являющейся также скалярным произведением вектора с самим собой:
\( \displaystyle s^<2>=x \cdot x + y \cdot y\)
Поскольку размерность пространства может быть больше двух, координаты удобно различать не буквами, а индексом (верхним):
\( \displaystyle s^<2>=x^ <1>\cdot x^ <1>+ x^ <2>\cdot x^<2>\),
что теперь удобно переписать через знак суммы:
\( \displaystyle s^<2>=\sum_
Метрика немного обобщает эту формулу для вычисления квадрата длины вектора:
\( \displaystyle s^<2>=\sum_
где N — размерность пространства; g — метрика.
В нашем простом случае метрика представляется единичной матрицей:
То есть в развернутом виде квадрат длины имеет запись:
\( \displaystyle s^<2>=1\cdot x^ <1>x^ <1>+0\cdot x^ <1>x^<2>+0\cdot x^ <2>x^<1>+1\cdot x^ <2>x^<2>\)
Перекрестные члены в скалярном произведении уходят за счет соответствующих нулей в метрике.
Длину кривой можно представить, состоящей из суммы длин бесконечно малых векторов:
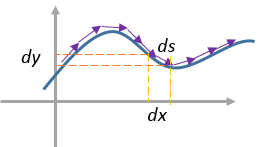
По аналогии с обычными векторами, квадрат длины бесконечно малого вектора:
\( \displaystyle ds^<2>=dx^2 + dy^2 \),
а длина кривой — их сумма (интеграл):
\( \displaystyle s=\int \sqrt
То есть если кривая задана функцией \( \displaystyle y(x)\), для вычисления ее длины необходимо найти ее производную и вычислить вышеприведенный интеграл.
Формула справедлива в декартовых координатах, где метрика равна единичной матрице. Рассмотрим для примера полярные координаты, где точка на плоскости представляется радиусом и углом, то есть координатами \( \displaystyle (r,\theta )\) :
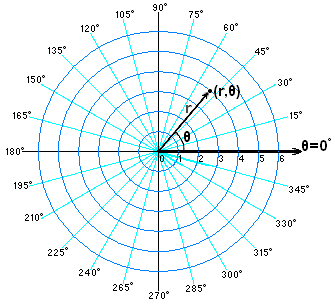
Метрика полярных координат:
или для квадрата длины:
\( \displaystyle ds^<2>=dr^2 + r^2 d\theta ^2 \),
Наличие множителя \( \displaystyle r^2 \) объясняется увеличением длины дуги фиксированного угла при увеличении радиуса. Если задать кривую в виде функции \( \displaystyle r(\theta) \), то длина кривой будет определятся как:
Можно, например, использовать данную формулу для нахождения длины окружности. В этом случае \( \displaystyle r\) не зависит от \( \displaystyle \theta\), поэтому \( \displaystyle \frac
\( \displaystyle s=\int_<0>^ <2\pi>\sqrt <0 + r^2>d\theta=\) \( \displaystyle r\int_<0>^<2\pi>d\theta=2\pi r\)
Не обязательно все элементы метрики кроме диагональных равны нулю. Если перейти от декартовых к криволинейным координатам, например:
\( \displaystyle u=x+2y\);
\( \displaystyle v=x-y\),
то метрика в этих координатах будет выглядеть:
Вид метрики зависит не только от системы координат, но и от самого рассматриваемого пространства. В приведенных выше примерах мы оставались в рамках Евклидовой геометрии. Но существуют и другие, где не действуют некоторые факты Евклидовой геометрии, например, о сумме углов треугольника или непересекаемости параллельных линий, но описанный математический аппарат работает везде. Простейший пример искривленного пространства — поверхность сферы.
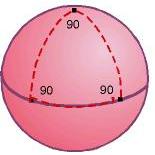

Это двумерное пространство. В координатах, заданных двумя углами вектора из начала координат \( \displaystyle (\theta, \phi)\), метрика имеет вид:
где R — фиксированный радиус сферы.
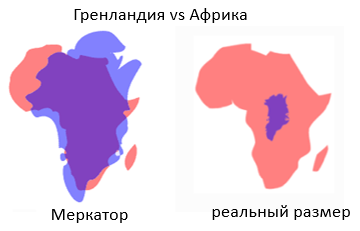
Данную метрику нельзя привести к декартовой метрике плоскости никакими преобразованиями координат. То есть нельзя отобразить поверхность сферы на плоскость без искажений. Например, на карте мира (проекция Меркатора) Гренландия кажется в 2—3 раза больше Австралии и сравнима по размерам с Южной Америкой. В реальности Гренландия втрое меньше Австралии и в 8 раз меньше Южной Америки.
Существуют и более экзотические пространства. Например, пространство Минковского, называемое также пространство-время специальной теории относительности. Это четырехмерное пространство с координатами \( \displaystyle (t, x, y, z)\) и метрикой Минковского:
\( \displaystyle \eta=\begin
0 & -1 & 0 & 0\\
0 & 0 & -1 & 0\\
0 & 0 & 0 & -1
\end
В таком пространстве даже квадрат длины может быть отрицательным. Но оно все равно является плоским. Искривленное пространство-время описывается общей теорией относительности. Так метрика пространства-времени вблизи черной дыры (и любого другого сферически симметричного тела) в координатах \( \displaystyle (t, r, \theta, \phi)\) получила название метрика Шварцшильда:
\( \displaystyle g=\begin
0 & -\left (1 -r_s/r \right )^ <-1>& 0 & 0\\
0 & 0 & -r^2 & 0\\
0 & 0 & 0 & -r^2 sin^2 \theta
\end
\( \displaystyle r_s=\frac<2GM>
Содержание
2. Связь между дифференциалами в декартовой и криволинейной системах координат
Список литературы
Введение
Наблюдая длительный период развития математики, можно заметить, что диалектически происходит периодическая смена двух основных взглядов на восприятие и описание закономерностей окружающей действительности. В одни эпохи идет алгебраизация с ее формализацией и логическим структурированием языка, торжествуют аксиоматические подходы, иногда в ущерб наглядности и даже возможным приложениям. В другие эпохи главенствует геометризация с ее стремлением к интуитивной наглядности, визуализации, к «картинкам», иногда в ущерб даже формальной строгости доказательств. Психологи утверждают, что и индивидуумы делятся на «левополушарных» и «правополушарных», одни из них тяготеют к счету, к абстракции, другие — к наглядности, к геометрии, к моделям.
Сейчас, как нам кажется, имеется тенденция к очередной геометризации, модельности и, следовательно, к воспитанию навыков образного мышления. Мы обращали уже внимание в наших методических указаниях [5] на то, что эта задача становится особенно актуальной в связи с возрастающим количеством нелинейных задач,возникающих в современной физике и технике, решения которых приводят к сложным визуализациям результатов численных расчетов и экспериментов. Мыслительные процессы человека, такие как инженерное проектирование, научно-теоретическое изучение явлений и их связей, оперируют образами, визуальными формами.
Обучение методам образного мышления является большой и серьезной задачей. В данном пособии делается очередной шаг в этом направлении. Учебников и монографий по геометрии много, и неисчислимо много всевозможных методических пособий по тем или иным частным вопросам. Чем же предлагаемые вниманию читателя методические указания отличаются от остальных?
Один из соавторов из личных пристрастий время от времени вкрапляет в читаемый им на физическом факультете курс математического анализа элементы дифференциальной геометрии; другой соавтор в свое время, будучи студентом, активно воспринял эти «вкрапления»; третий, которому удалось продвинуть недавно некоторые трудные вопросы нелинейной физики, поставил второму задачу о большом изгибе мембраны, которую они решали, опираясь на аппарат дифференциальной геометрии, а результат этой работы вышел, по сути, за рамки классической теории. Сама работа получила медаль Российской академии наук на конкурсе научных работ студентов вузов за 1998 год.
Таким образом, дифференциальная геометрия является типичным рабочим инструментом в некоторых актуальных областях современной нелинейной физики и механики. Мы надеемся, что это пособие будет помогать в работе физикам и механикам, как инженерам, так и теоретикам.
Эта работа подготовлена аспирантом (К.Г. Охоткиным) и преподавателями (В.А. Степаненко и Ю.В. Захаровым) и является одним из результатов сотрудничества в рамках Межвузовского инженерно-физического отделения.
Мы благодарны всем, помогавшим изданию работы.
1. Определение поверхности
Любой однозначной функции двух переменных w = f ( x , y ) можно поставить во взаимнооднозначное соответствие поверхность (ее график), погруженную в обычное евклидово пространство R 3 , с декартовыми координатами x , y , w . Соответственно в цилиндрических координатах r , φ , w поверхность будет описываться функцией w = f(r, φ) (рис. 1). Такой способ задания поверхности называют явным.
Рис. 1. График поверхности в декартовых координатах
На поверхности можно вводить криволинейную сетку поверхностных координат. Например, lx , ly – поверхностные криволинейные координаты, которые получаются в результате сечения поверхности семейством вертикальных плоскостей wox и woy ( рис. 1 ) . Соответственно в цилиндрических координатах можно ввести криволинейные координаты l r , l φ , где l r – криволинейный радиус, получаемый с помощью сечения поверхности плоскостью wor , а lφ = r φ – дуга окружности. Задаваемые таким образом на поверхности криволинейные координаты являются в общем случае косоугольными (углы между координатными линиями на поверхности не всегда прямые, как в случае ортогональных координат).
2. Связь между дифференциалами в декартовой и криволинейной системах координат
Введем угол наклона касательной θx к кривой, получаемой сечением поверхности w = f(x, y) вертикальной плоскостью wo x , в текущей точке x (рис. 2). Аналогично вводятся углы θ y и θ r для цилиндрической системы координат.
Рис. 2. Сечение wo x поверхности w = f ( x , y )
Напишем основные выражения, связывающие дифференциалы в декартовой системе координат dx, dy и в криволинейной системе координат dlx, dly. Имеем в сечениях wo x (рис. 2)
 ,
,  , (1)
, (1)
 ,
,  ,
,  ; (2)
; (2)
для сечений wo y :  ,
,  ,
,  .
.
Соответствующие формулы верныив цилиндрических координатах для сечения wo r . Можно также сказать, что формулы (2) задают неявно связь между декартовыми переменными и криволинейными длинами на поверхности, в общем случае x ( lx , ly ), y ( lx , ly ), z ( lx , ly , θx , θy ).
3. Элемент поверхности. Замена переменных
А. Изменение при переходе из одной системы координат (x, y) в другую (u, v) элемента площади dS0 в двумерном случае
Рассмотрим малый элемент площади dS0 в плоскости (x, y) (рис. 3).
 .
.
Его дифференциал в произвольном направлении l
 .
.
Площадь малого элемента dS0 построим как модуль векторного произведения двух векторов:
 ,
,
где J – определитель матрицы якобиана перехода. Т.е. dS 0 = dxdy = Jdudv . В современной дифференциальной геометрии переход осуществляется введением дифференциальной формы ω = dS0 = dx ^ dy = J du ^ dv, где ^ — внешнее произведение. (См., например, [1], [2] ). Приведем пример для полярной системы координат:
Б. Замена системы координат для элементарной площадки на поверхности
 Необходимость выражения дифференциала площади элемента поверхности в различных криволинейных координатах возникает, прежде всего, в процессе вычисления поверхностных интегралов, при переходе к двойному интегралу. Введем обозначения: dS – поверхностный элемент площади (рис. 4), dS 0 – площадь элемента, лежащего в плоскости xoy , или проекция на эту плоскость dS, т.е. dS0 = d S cosγ , где
Необходимость выражения дифференциала площади элемента поверхности в различных криволинейных координатах возникает, прежде всего, в процессе вычисления поверхностных интегралов, при переходе к двойному интегралу. Введем обозначения: dS – поверхностный элемент площади (рис. 4), dS 0 – площадь элемента, лежащего в плоскости xoy , или проекция на эту плоскость dS, т.е. dS0 = d S cosγ , где  ,
,  – вектор нормали. Криволинейные ортогональные координаты на поверхности — u , v . Поверхность задана явно, w = f(x, y). Радиус-вектор текущей точки —
– вектор нормали. Криволинейные ортогональные координаты на поверхности — u , v . Поверхность задана явно, w = f(x, y). Радиус-вектор текущей точки —  имеет компоненты:
имеет компоненты:
Это задание поверхности в параметрической форме. Построим математическую модель площади с помощью векторного произведения дифференциалов радиус-вектора, аналогично пункту А:
 . (3)
. (3)
Выражение  называется детерминантом первой квадратичной формы, см. следующий пункт, (6). В частном случае, когда в качестве криволинейных координат выбираются собственно декартовые координаты, имеем
называется детерминантом первой квадратичной формы, см. следующий пункт, (6). В частном случае, когда в качестве криволинейных координат выбираются собственно декартовые координаты, имеем
 .
.
Пример : элемент площади в цилиндрических координатах и при осевой симметрии,
когда w = f ( r ) и d / d φ = 0, имеет вид:
 . (4)
. (4)
4. Исследование поверхности с помощью аппарата квадратичных форм
А. Первая квадратичная форма I
В каждой точке поверхности можно ввести квадратичную форму
 , (5)
, (5)
где (ξ, η) – криволинейные поверхностные координаты.
Общеприняты следующие обозначения для коэффициентов формы:
Поясним геометрический смысл первой формы. Пусть  – радиус-вектор. Его дифференциал
– радиус-вектор. Его дифференциал
 , (7)
, (7)
 , (8)
, (8)
где dl – элемент дуги поверхности в произвольном направлении l. Таким образом, первая квадратичная форма определяет квадрат dl. Определим коэффициенты формы, подставив (7) в (8):
 ,
,
 , (9)
, (9)
 .
.
Если χ — угол между касательными векторами (между координатными линиями на поверхности в текущей точке), то  . Для ортогональных координат на поверхности χ = π/2, a12 = 0.
. Для ортогональных координат на поверхности χ = π/2, a12 = 0.
Введем обозначение для детерминанта квадратичной формы
 . (10 )
. (10 )
Рассмотрим рис. 5. В текущей точке M построим касательные векторы  и
и  . Плоскость L, проведенная через них, является касательной плоскостью к поверхности в точке М. Линия, перпендикулярная к плоскости и проведенная через точку М, является нормалью в текущей точке к поверхности. Ее направление определяется векторным произведением касательных векторов. Единичный вектор нормали находим из следующего выражения:
. Плоскость L, проведенная через них, является касательной плоскостью к поверхности в точке М. Линия, перпендикулярная к плоскости и проведенная через точку М, является нормалью в текущей точке к поверхности. Ее направление определяется векторным произведением касательных векторов. Единичный вектор нормали находим из следующего выражения:
 . (11 )
. (11 )
Рис. 5. Координатные векторы в точке М
Таким образом, первая квадратичная форма описывает поверхность в первом приближении, когда малый участок поверхности заменяется на участок касательной плоскости. Первая квадратичная форма определяет углы между линиями и длины дуг на поверхности, а также площади любых участков поверхности (см. (3) ). Малый элемент площади поверхности
 , (12 )
, (12 )
где  — криволинейные дифференциалы на поверхности, получаемые по формулам типа (1), (2) .
— криволинейные дифференциалы на поверхности, получаемые по формулам типа (1), (2) .
Б. Вторая квадратичная форма II
Вторая квадратичная форма описывает поверхность во втором приближении. Она показывает, как отклоняется поверхность от касательной плоскости, и полностью определяет кривизну поверхности.
 . (13 )
. (13 )
Коэффициенты формы определяются следующими выражениями:
 ,
,
 , (14 )
, (14 )
 .
.
В. Исследование кривизны поверхности
Для двумерного случая скалярной кривизной кривой, лежащей в плоскости, называется величина
 , (15 )
, (15 )
взятая в текущей точке кривой.
Здесь все векторы лежат в одной плоскости. В литературе часто встречаются определения кривизны (15) с разными знаками, которые можно трактовать различно, в зависимости от конкретной задачи. Общий физический смысл: кривизна кривой линии пропорциональна моменту сил, изгибающих ее.
Для пространственного случая нормальной кривизной линии l , получаемой нормальным сечением поверхности, называется величина
 , (16 )
, (16 )
взятая в текущей точке линии. Если вертикальное и нормальное сечения совпадают, то совпадают и величины кривизн (15) и (16). Кривизна κ в произвольном наклонном сечении определяется из (16) по теореме Менье:  , где γ – угол между этим наклонным и нормальным сечениями.
, где γ – угол между этим наклонным и нормальным сечениями.
Выберем в качестве параметра, определяющего положение точки на кривой, длину дуги. Тогда криволинейные координаты точки будут функциями длины дуги l: ξ(l), η(l). Выражение (7) перейдет в
 . (17 )
. (17 )
Векторы  и
и  перпендикулярны нормали
перпендикулярны нормали  , (см. рис. 5 ). Имеем из (16)
, (см. рис. 5 ). Имеем из (16)
 ,
,
 . (18 )
. (18 )
Найдем из (18) нормальные кривизны координатных линий:
1) η = Const, dη = 0,  ;
;
2) ξ = Const, dξ = 0,  . (19 )
. (19 )
Параметр b12/ w определяет кручение поверхности. Проследим за изменением κn при повороте сечения вокруг нормали к поверхности. Для гладких поверхностей кривизна будет плавно периодически изменяться от минимального до максимального значения. Найдем их. Перепишем выражение (18) в виде
 .
.
Раскрывая скобки и перегруппировывая члены выражения, имеем
 .
.
Получили квадратичную форму
 .
.
Необходимым и достаточным условием существования нетривиального решения по теореме Крамера является равенство нулю определителя этой матрицы. Имеем квадратное уравнение для кривизны
 .
.
Отсюда находим два экстремальных значения κn, которые называются главными кривизнами поверхности в данной точке. Соответствующие им направления (для отношения dξ:dη) называются главными. Главные направления взаимно перпендикулярны.
Проведем линии на поверхности таким образом, чтобы в каждой точке касательные к ним шли вдоль главных направлений. Такие кривые называются линиями кривизны; их удобно выбирать в качестве координатных кривых. Если поверхностная координатная сеть (ξ, η) совпадает с линиями кривизны поверхности, то главные кривизны совпадают с (19) . Если коэффициент первой формы a12 = 0, то это сеть ортогональных криволинейных координат (для них c = p /2); если b12 = 0, то сеть называется сопряженной.
По свойству решений квадратного уравнения имеем для произведения и полусуммы главных кривизн выражения
 ,
,  .
.
Гауссовой кривизной поверхности в данной точке называется величина
 . (20 )
. (20 )
Средней кривизной поверхности в данной точке называется величина
 . (21)
. (21)
5. Метрический тензор
Пусть дана обычная (лабораторная) система координат x ( x 1 , x 2 , …, x n ). Сделаем переход в произвольную криволинейную (не обязательно ортогональную) систему координат y (y 1 , y 2 , …, y n ). Радиус-вектор и матрица Якоби будет задаваться следующим образом (здесь пишем верхние индексы – используем контравариантные координаты):
 ,
,  . (22)
. (22)
В этой матрице столбцы являются компонентами касательных векторов  к координатным линиям y 1 , y 2 , …, y n . Если их нормировать, то получим набор базисных векторов
к координатным линиям y 1 , y 2 , …, y n . Если их нормировать, то получим набор базисных векторов  в пространстве x .
в пространстве x .
Метрический тензор в базисе  имеет вид
имеет вид
 . (2 3)
. (2 3)
Символы Кристоффеля (коэффициенты связности)
Введем тензорные обозначения касательных векторов и их производных:

 ,
,  .
.
Векторы производных разложим по базисным векторам:
 , (24 )
, (24 )
где коэффициенты разложения  — некоторые функции координат, вид которых зависит от выбора системы координат; в декартовой системе все
— некоторые функции координат, вид которых зависит от выбора системы координат; в декартовой системе все  . Отсюда видно, что величины
. Отсюда видно, что величины  не образуют тензора, так как тензор, равный нулю в одной системе координат, равен нулю и во всякой другой. В данной метрике символы Кристоффеля вычисляются по формулам
не образуют тензора, так как тензор, равный нулю в одной системе координат, равен нулю и во всякой другой. В данной метрике символы Кристоффеля вычисляются по формулам
 , (2 5)
, (2 5)
доказательство которых приведем ниже.
Найдем, как преобразуется производная от произвольной вектор-функции ∂A i / ∂y j при переходе от декартовых к криволинейным координатам. Для того чтобы получить дифференциал вектора, необходимо, чтобы оба вектора находились в одной точке пространства. Но в криволинейных координатах разность компонент векторов после параллельного переноса их в одну точку не совпадает с их разностью до переноса (т.е. с дифференциалом dA i ). Изменение компонент вектора при бесконечно малом параллельном переносе зависит линейно от самих компонент. Таким образом, запишем точные производные в криволинейных координатах, так называемые ковариантные производные (которые являются тензорами)
 ,
,  ,
,  , (26 )
, (26 )
соответственно от контравариантного и ковариантного векторов и тензора. В декартовой метрике они, очевидно, совпадают с обычными производными.
Линия пространства y i = y i ( t ) называется геодезической, если ее вектор скорости A i = dy i / dt параллелен вдоль нее самой, т.е. его ковариантная производная равна нулю.
Уравнение геодезических линий
 .
.
Если все символы Кристоффеля равны нулю, то решениями этого уравнения являются обычные прямые. Таким образом, геодезические линии являются аналогом прямых для случая произвольной кривизны пространства.
Тензор кривизны Римана
Если дважды ковариантно продифференцировать вектор A i , то результат зависит, вообще говоря, от порядка дифференцирования, в противоположность от обычных производных. Запишем эту разность
 ,
,
где  — тензор 4-го ранга:
— тензор 4-го ранга:
 , (27 )
, (27 )
 , где
, где  . (2 8)
. (2 8)
Этот тензор называется тензором кривизны Римана данной метрики. Свойства тензора для симметричных связностей:
 ,
,  .
.
Из тензора Римана можно путем упрощения построить тензор второго ранга — тензор Риччи, являющийся следом тензора Римана
 . ( 29)
. ( 29)
Свернув метрикой тензор Риччи, получим инвариант — след тензора Риччи
 , (3 0)
, (3 0)
называемый скалярной кривизной данного пространства. Гауссова кривизна, определенная в (19), связана со скалярной следующим образом: 2 K = R .
Тензором кручения пространства называется выражение
 . (3 1)
. (3 1)
Если связность  является симметричной, то тензор кручения равен нулю. Поясним геометрический смысл тензора кручения на рис. 6. Рассмотрим поверхность S . В точке А к S построим касательную плоскость p . Выберем произвольный бесконечно малый квадрат ABCD на плоскости p с вершиной в А. Из точки А по поверхности S выпустим геодезическую в направлении вектора AB . Пройдя по ней расстояние, соответствующее параметру, равному длине AB , попадем в точку B ‘ . Аналогично из А по S выпустим геодезическую в направлении AD , попадем в D ‘ . Совершим параллельный перенос вектора AD в точку B ‘ вдоль геодезической AB ‘ и выпустим геодезическую из B ‘ вдоль перенесенного вектора, попадем в точку С’. Аналогично вектор AB перенесем параллельно вдоль AD ‘ и вдоль перенесенного вектора из D ‘ выпустим геодезическую, попадем в C » . Если кручение нулевое, то C ‘ = C », и геодезический квадрат с точностью до малых более высокого порядка замкнется, в противном случае нет.
является симметричной, то тензор кручения равен нулю. Поясним геометрический смысл тензора кручения на рис. 6. Рассмотрим поверхность S . В точке А к S построим касательную плоскость p . Выберем произвольный бесконечно малый квадрат ABCD на плоскости p с вершиной в А. Из точки А по поверхности S выпустим геодезическую в направлении вектора AB . Пройдя по ней расстояние, соответствующее параметру, равному длине AB , попадем в точку B ‘ . Аналогично из А по S выпустим геодезическую в направлении AD , попадем в D ‘ . Совершим параллельный перенос вектора AD в точку B ‘ вдоль геодезической AB ‘ и выпустим геодезическую из B ‘ вдоль перенесенного вектора, попадем в точку С’. Аналогично вектор AB перенесем параллельно вдоль AD ‘ и вдоль перенесенного вектора из D ‘ выпустим геодезическую, попадем в C » . Если кручение нулевое, то C ‘ = C », и геодезический квадрат с точностью до малых более высокого порядка замкнется, в противном случае нет.
Скалярным произведением двух произвольных векторов
 ,
, 
в метрике gij будет следующая билинейная форма:
 .
.
Для частного случая евклидова пространства метрический тензор  — единичная матрица, и скалярное произведение принимает обычный вид
— единичная матрица, и скалярное произведение принимает обычный вид
 .
.
Если взять скалярное произведение двух одинаковых векторов, то получим положительно определенную квадратичную форму
 ,
,
следовательно, det g > 0.
Дивергенция вектора имеет вид
 .
.
Градиент функции f имеет вид
 .
.
Оператор Лапласа в произвольных криволинейных координатах:
 |
В ортогональных криволинейных координатах матрица метрического тензора имеет диагональный вид
 ,
,
где положительные функции Hi — коэффициенты Ламе системы координат и  . Они соответствуют корням из коэффициентов первой квадратичной формы a 11 и a 22 в теории поверхностей.
. Они соответствуют корням из коэффициентов первой квадратичной формы a 11 и a 22 в теории поверхностей.
Оператор Лапласа в евклидовом пространстве R 3 , в декартовых координатах.
Здесь n = 3, x 1 = x , x 2 = y , x 3 = z . Лапласиан принимает вид
 . (33 )
. (33 )
Оператор Лапласа в евклидовом пространстве R 3 , в сферических координатах:
x 1 = r sin θ cos φ , x 2 = r sin θ cos φ , x 3 = r cos θ , (здесь n = 3, y 1 = r , y 2 = θ , y 3 = φ ).
Ортонормированный базис er, e q , e j ,  . Лапласиан принимает вид
. Лапласиан принимает вид
 .
.
Оператор Лапласа в евклидовом пространстве R 3 , в цилиндрических координатах:
x 1 = r cos φ, x 2 = r sinφ, x 3 = z. ( здесь n = 3, y 1 = r, y 2 = φ, y 3 = z). Лапласиан принимает вид
 . ( 34)
. ( 34)
6. Метрический тензор в теории поверхностей
А. Метрика поверхности
Рассмотрим поверхность w = w ( x , y ) в евклидовом пространстве R 3 . Применим для исследования этой поверхности приведенный выше тензорный аппарат дифференциальной геометрии. Будем задавать поверхность в параметрическом виде как геометрическое место точек, описываемых радиус-вектором, проведенным из начала координат (так же, как и при рассмотрении первой квадратичной формы поверхности):
 ,
,
поверхностные криволинейные координаты
Введем тензорные обозначения для производных радиус-вектора поверхности по криволинейным координатам:
 ;
;  .
.
Получим метрический тензор поверхности так же, как и в (23) :
 , ( 35)
, ( 35)
его компоненты образуют матрицу, совпадающую с матрицей первой квадратичной формы поверхности
 ,
,
т.е. gij = aij , и в тензорных обозначениях первая квадратичная форма примет следующий вид:
 .
.
Ковариантные компоненты метрического тензора находим, обращая матрицу
 . (3 6)
. (3 6)
С помощью метрического тензора выполняют операции поднятия и опускания индексов, например, для нахождения ковариантных компонент векторов:
 .
.
Б. Единичный орт нормали в текущей точке поверхности (см. (11)
 .
.
В. Элементарный элемент площади на поверхности
Угол между касательными векторами  ,
,  .
.
Элемент площади (см. (12)
 . (37 )
. (37 )
Г. Вторая квадратичная форма записывается в тензорных обозначениях как
II = bij dy i dy j , ее коэффициенты вычисляются по формулам
 . (3 8)
. (3 8)
Они подчинены двум уравнениям Петерсона-Кодацци
 , i, j, k = 1, 2.
, i, j, k = 1, 2.
Д. Криволинейный оператор Лапласа записывается так же, как и в (32):
 ( 39)
( 39)
Е. Локальный базис и символы Кристоффеля поверхности
В текущей точке y 1 , y 2 поверхности касательные векторы r 1 , r 2 и орт нормали n образуют сопутствующий локальный базис (триэдр) в R 3 , причем
 . (40)
. (40)
Разложим вектор второй производной в локальном базисе
 , (4 1)
, (4 1)
и найдем неизвестные коэффициенты разложения  и
и  . Для этого умножим скалярно обе части уравнения (41) сначала на вектор нормали n :
. Для этого умножим скалярно обе части уравнения (41) сначала на вектор нормали n :
 .
.
Так как касательные векторы и орт нормали перпендикулярны, то имеем
 .
.
Этот коэффициент действительно совпадает с коэффициентами второй квадратичной формы (38) . Умножим теперь обе части уравнения на касательный вектор  :
:
Выразим коэффициенты  явно, для этого умножим обе части уравнения на ковариантный метрический тензор
явно, для этого умножим обе части уравнения на ковариантный метрический тензор
 . (4 2)
. (4 2)
Скалярное произведение, стоящее в левой части уравнения, можно выразить через компоненты метрики. Продифференцируем метрику  по координате и проведем циклические перестановки индексов:
по координате и проведем циклические перестановки индексов:
Сложим последние два уравнения и вычтем первое:
 ,
,
окончательно имеем известное выражение
 (43)
(43)
для коэффициентов, которые называются символами Кристоффеля 2 рода. Таким образом, мы получили два уравнения (42) и (43) для нахождения коэффициентов Кристоффеля и уравнение (41) для проверки. Тензор кривизны Римана поверхности определяется так же, как и в (27) .
Рассмотрим заданную явно поверхность w = w ( x , y ) в декартовых координатах:
Имеем радиус-вектор точки поверхности
 .
.
Первые и вторые производные радиус-вектора
 ,
,  ,
,  ,
,  ,
,  .
.
Метрика (матрица первой квадратичной формы) по определению (35)
 ,
,
 .
.
Единичный вектор нормали имеет вид
 .
.
Малый элемент площади поверхности, с использованием соотношений (2)
 .
.
Криволинейный оператор Лапласа в общем косоугольном случае
 , (44 )
, (44 )
в частном случае поверхности, на которой возникли ортогональные криволинейные координаты ( ), имеем
), имеем
 .
.
Матрица второй квадратичной формы
 .
.
Главные кривизны найдем по формулам (19) :
 ,
,  . (4 5)
. (4 5)
Для осесимметричной поверхности логично перейти в полярные координаты. Если здесь сделать формальную замену переменных (49) , то получим формулы для кривизн в полярных координатах (50) .
В выражениях (45) корень, стоящий в знаменателе, является модулем вектора нормали к поверхности в текущей точке. Если для этой поверхности нормальное сечение совпадает с вертикальным, то кривизны (45) перейдут в
 ,
,  . (4 6)
. (4 6)
В частном случае малых прогибов поверхности (углов наклона касательной) в выражениях (46) можно пренебречь квадратом производной по сравнению с единицей и получить выражения для малых кривизн (геометрически линейный случай):
 ,
,  . ( 47)
. ( 47)
Символы Кристоффеля можно найти по формуле (43) или по формуле (42) :
 .
.
По формулам (27) вычислим компоненты тензора кривизны Римана
 ,
,
 ,
,  .
.
Остальные компоненты равны нулю. Найдем тензор Риччи по формуле (29)
 .
.
Скалярная кривизна по формуле (30)
 ,
,
где К — гауссова кривизна, см. формулу (20) .
Рассмотрим осесимметричную поверхность, заданную явно функцией w(r), в цилиндрических координатах. Для этого случая пропадает зависимость от полярного угла φ, и все  , поэтому частные производные по полярному радиусу совпадают с полными производными.
, поэтому частные производные по полярному радиусу совпадают с полными производными.
Координаты y 1 = ξ = r, y 2 = η = φ. Используя формулы замены переменных, запишем радиус-вектор
 .
.
Выпишем производные от радиус-вектора по координатам
 ,
,  ,
,  ,
,  ,
,  .
.
Компоненты метрического тензора (коэффициенты первой квадратичной формы) найдем по формулам (35) или (9):
 ,
,  ,
,  .
.
Отсюда видно, что мы получили на поверхности сетку ортогональных криволинейных координат. Оператор Лапласа
 . ( 48)
. ( 48)
Для случая пологих поверхностей, когда можно пренебречь квадратом производной  по сравнению с единицей, оператор (48) совпадает с обычным оператором Лапласа в полярных координатах (см., например, (34) . Выражение (48) можно получить из (44) прямой заменой декартовых координат на полярные для осесимметричного случая. Приведем эти формулы перехода
по сравнению с единицей, оператор (48) совпадает с обычным оператором Лапласа в полярных координатах (см., например, (34) . Выражение (48) можно получить из (44) прямой заменой декартовых координат на полярные для осесимметричного случая. Приведем эти формулы перехода
 ,
,  ,
,  ,
,  ,
,  . ( 49)
. ( 49)
Коэффициенты второй квадратичной формы
 .
.
Главные кривизны поверхности найдем по формулам (19) :
 ,
,  . (5 0)
. (5 0)
Здесь  , т.е. использована замена переменных w ( r ) на θ ( r ), вида (2) . Выражения (50) можно получить заменой переменных (49) непосредственно из приведенных выше кривизн (45) в декартовой системе координат.
, т.е. использована замена переменных w ( r ) на θ ( r ), вида (2) . Выражения (50) можно получить заменой переменных (49) непосредственно из приведенных выше кривизн (45) в декартовой системе координат.
Кручение поверхности отсутствует в осесимметричном случае, так как диагональный коэффициент второй квадратичной формы b 12 = 0. Из (50) видны свойства главных кривизн:
 ,
,  . ( 51)
. ( 51)
 ,
,  ,
,  ,
,  .
.
Отличные от нуля компоненты тензора Римана
 ,
,  .
.
Скалярную кривизну поверхности найдем, дважды свернув тензор Римана
 .
.
Вычислим для примера главные кривизны псевдосферы — поверхности, образованной вращением трактрисы  относительно оси Ow (трактриса является эвольвентой цепной линии
относительно оси Ow (трактриса является эвольвентой цепной линии  ). Используя формулы (50) , найдем кривизны
). Используя формулы (50) , найдем кривизны
 ,
,  .
.
Гауссова кривизна  постоянна и отрицательна на всей поверхности. Выполняя интегрирование
постоянна и отрицательна на всей поверхности. Выполняя интегрирование
 ,
,
получим длину дуги вдоль радиуса на поверхности псевдосферы.
Список литератур ы
1. Дубровин Б.А., Новиков С.П., Фоменко А.Т . Современная геометрия. – М.: Наука, 1985.
2. Новиков С.П., Фоменко А.Т . Элементы дифференциальной геометрии и топологии. – М.: Наука, 1987.
3. Ландау Л.Д., Лифшиц Е.М. Теория поля. — М.: Наука, 1988.
4. Ландау Л.Д., Лифшиц Е.М. Теория упругости. — М.: Наука, 1987.
5. Поверхности функций комплексного переменного: Метод. указания, ч. 5 / Краснояр. гос. ун-т; Сост. Ю.В. Захаров, К.Г. Охоткин, Л.С. Титов. Красноярск, 1996.
6. Победря Б.Е . Лекции по тензорному анализу. — М.: Изд-во МГУ, 1986.
Вычислить метрический тензор поверхности заданный уравнениями
В. Г. Автор. Векторная и тензорная алгебра для будущих физиков и техников
.Геометрическое определение вектора
.Алгебраические операции над направленными отрезками
..Сложение направленных отрезков
..Умножение направленных отрезков на число
..Параллельное проектирование вектора в пространстве
. Проекция точки на плоскость
. Проекция вектора на плоскость
..Ортогональная проекция вектора в пространстве
. Ортогональная проекция вектора на плоскость
. Ортогональная проекция вектора на прямую и направленную ось
..Векторы в трехмерном геометрическом пространстве
..Линейная зависимость векторов и размерность пространства
..Различные формы записи векторов
..Линейные операции над векторами в координатной форме
. Свойства скалярного умножения
. Скалярное умножение в декартовых координатах
..Некоторые примеры использования скалярного умножения
..Площадь параллелограмма, построенного на векторах
..Задачи на применение определителей
..Определитель третьего порядка и его свойства
..Векторное умножение векторов базиса декартовой системы координат
.Ковариантные и контравариантные координаты вектора
..Индексная форма записи для выражений с определителями
..Свойства символов Веблена
..Операция векторного умножения в произвольных косоугольных координатах
.Линейный оператор и его матрица
.Доказательство теоремы об определителе
.Общие определения алгебраических операций с тензорами
.Примеры на применение тензоров в физике
..Задачи на тождественные преобразования



Проделанная нами работа позволяет сделать некоторые обобщения. Последовательно развивая координатный метод в теории векторов, мы постоянно оказываемся перед необходимостью работать с различными массивами чисел. Наиболее простой из них – это массив координат вектора. Затем необходимость выразить метрические отношения геометрического пространства приводит нас к массиву координат метрического тензора. Это уже двухмерный массив, обладающий более сложным строением. Потребность выразить функциональные отношения между векторами приводит к понятию линейного оператора, координаты которого также образуют двухмерный массив. Еще раньше понятие ориентированного объема приводит нас к трехмерному массиву координат тензора Леви-Чивиты.
Представим теперь, что нам понадобилось выразить линейную функциональную зависимость между двумя операторами  и
и  . Понятно, что нам для этого потребуется массив чисел с четырьмя индексами:
. Понятно, что нам для этого потребуется массив чисел с четырьмя индексами:  . Открыв таким образом двери перед векторными величинами, мы не можем уже отказаться от применения массивов с произвольным количеством индексов.
. Открыв таким образом двери перед векторными величинами, мы не можем уже отказаться от применения массивов с произвольным количеством индексов.
Следующее важное наблюдение, которое можно сделать, заключается в том, что массивы, о которых идет речь, существуют не сами по себе, а всегда связаны с некоторой системой координат . Можно сказать, что они всегда заданы в определенной системе координат и изменяются по известному закону при переходе к другой системе. Закон преобразования координат массивов копирует закон преобразования координат ковариантных и контравариантных координат векторов.
Над массивами можно выполнять алгебраические операции как над едиными объектами, получая при этом объекты того же типа, то есть новые массивы с теми же самыми законами преобразования координат. Это положение может показаться спорным, если учесть, что скалярное умножение двух векторов равно числу. Число не есть массив, и оно не изменяется при изменении координатной системы. Однако это исключение легко обойти, если положить, что число – это массив нулевой размерности, то есть с нулевым количеством индексов.
Общий закон изменения координат массивов с законом изменения координат векторов позволяет строить математические выражения не зависимые от случайного выбора координатных систем.
Все это является основанием для того, чтобы выделить такие массивы как особый предмет для самостоятельного изучения. Для этого нам необходимо только дать им особое название и соответствующее определение. Все это было уже сделано итальянскими математиками Риччи и Леви-Чивитой в 1901 г. Новый математический объект получил название тензора, а наука о тензорах была названа тензорным исчислением.
Общее определение тензора (29)
Тензором размерности p + q мы будем называть массив  чисел
чисел  , заданных в каждой координатной системе и занумерованных p индексами внизу и q индексами наверху, преобразующихся при переходе от одной координатной системы к другой по закону:
, заданных в каждой координатной системе и занумерованных p индексами внизу и q индексами наверху, преобразующихся при переходе от одной координатной системы к другой по закону:
 .
.
Числа  мы будем называть координатами тензора в соответствующей координатной системе. Все индексы пробегают значения 1, 2, 3 . n независимо друг от друга.
мы будем называть координатами тензора в соответствующей координатной системе. Все индексы пробегают значения 1, 2, 3 . n независимо друг от друга.
Наиболее общей интерпретацией тензора является линейный оператор. Коэффициенты линейного оператора в любой координатной системе являются координатами тензора. Привычный геометрический вектор также может быть интерпретирован как линейный оператор. Однако с конкретным тензором может быть связан не один, а несколько линейных операторов, поэтому, понятия линейного оператора и тензора, хотя и близки, не являются тождественными.

Алгебраические операции с тензорами вводятся таким образом, чтобы в результате их применения мы всегда снова получали бы тензоры. Для того чтобы это проверить, достаточно проконтролировать закон изменения координат.
Складывать можно только тензоры одинакового строения, например,  и
и  ;
;  и
и  . Сложение тензоров заключается в почленном сложении элементов обоих массивов с одинаковыми номерами. В результате сложения образуется новый массив или тензор того же строения:
. Сложение тензоров заключается в почленном сложении элементов обоих массивов с одинаковыми номерами. В результате сложения образуется новый массив или тензор того же строения:
 ;
;  .
.
Умножать можно любые тензоры друг на друга. При умножении каждая координата одного тензора умножается на каждую координату другого. Пусть, к примеру, мы перемножаем два тензора  и
и  , тогда в результате мы получим новый тензор
, тогда в результате мы получим новый тензор  . С этой операцией мы сталкивались при умножении тензоров Леви-Чивиты. При перемножении
. С этой операцией мы сталкивались при умножении тензоров Леви-Чивиты. При перемножении  и
и  мы получаем шестимерный массив координат, каждый элемент которого вычисляется как обобщенный символ Кронекера:
мы получаем шестимерный массив координат, каждый элемент которого вычисляется как обобщенный символ Кронекера:  .
.
При умножении тензоров размерность все время увеличивается. От этой операции не было бы большой пользы, если бы не было другой операции, которая может размерность понижать.
Свертывание тензора, свертывание тензоров
Свертывание тензора заключается в сложении всех элементов массива с одинаковыми значениями одного верхнего и одного нижнего индексов при фиксированных значениях остальных:
 .
.
В этом случае говорят, что мы свернули тензор по второму и четвертому индексам. Полученный в результате свертки тензор  зависит только от остальных индексов, не участвующих в операции. С операцией свертывания мы встречались при скалярном умножении векторов:
зависит только от остальных индексов, не участвующих в операции. С операцией свертывания мы встречались при скалярном умножении векторов:  . Операцию свертывания иногда удобно записывать при помощи символа Кронекера:
. Операцию свертывания иногда удобно записывать при помощи символа Кронекера:  .
.
Мы знаем, что произведению двух линейных операторов и соответствует линейный оператор  , матрица координат которого равна произведению матриц координат операторов и :
, матрица координат которого равна произведению матриц координат операторов и :  . Операция умножения тензоров определена таким образом, что она не соответствует операции умножения операторов. Для того, чтобы найти тензор, соответствующий произведению операторов, мы должны выполнить две операции над тензорами. Сначала необходимо тензоры перемножить:
. Операция умножения тензоров определена таким образом, что она не соответствует операции умножения операторов. Для того, чтобы найти тензор, соответствующий произведению операторов, мы должны выполнить две операции над тензорами. Сначала необходимо тензоры перемножить:  . Затем свернуть по паре индексов:
. Затем свернуть по паре индексов:  . Такую операцию, которая заключается в умножении двух тензоров с последующим свертыванием по индексам, один из которых принадлежит одному тензору, а второй другому, называется операцией свертывания тензоров. Тензоры можно свертывать по любому количеству индексов, например:
. Такую операцию, которая заключается в умножении двух тензоров с последующим свертыванием по индексам, один из которых принадлежит одному тензору, а второй другому, называется операцией свертывания тензоров. Тензоры можно свертывать по любому количеству индексов, например:  , в результате получаем скаляр.
, в результате получаем скаляр.
Перестановка индексов (транспонирование)
Эта операция нам также уже встречалась. Для тензоров с двумя индексами данная операция называется транспонированием, а тензор, который получается в результате применения данной операции, называется транспонированным тензором. Пусть, например, тензор  , то есть элементы тензора
, то есть элементы тензора  равны элементам другого тензора. Тензор в этом случае называется транспонированным тензором и обозначается
равны элементам другого тензора. Тензор в этом случае называется транспонированным тензором и обозначается  , то есть:
, то есть:  . Транспонированному тензору размерности два соответствует транспонированная матрица. Если индексы имеют различный тип, то это также требуется учесть при перестановке:
. Транспонированному тензору размерности два соответствует транспонированная матрица. Если индексы имеют различный тип, то это также требуется учесть при перестановке:  .
.
Использование метрического тензора позволяет, как мы уже знаем, задать еще одну тензорную операцию.
Операция поднятия и опускания индексов тензора
Например,  . Следовательно, если
. Следовательно, если  (предыдущий пример), то
(предыдущий пример), то  или в матричной форме:
или в матричной форме:
 .
.
Операция транспонирования тензора по индексам различного типа является более сложной операцией, чем может показаться на первый взгляд и об этом не следует забывать.
Теперь, когда мы дали общее определение тензора и операций над тензорами, мы видим, что все это нам уже знакомо. Так или иначе, и с тензорами и с операциями над ними мы уже сталкивались, только мы не знали, с чем имеем дело. Конечно это не вся теория, это только ее начало, но, тем не менее, все то, что хотелось бы сказать об этом предмете в книге для начинающих, мы уже сказали.

..Тензор инерции
Вычислим момент импульса  вращающегося твердого тела относительно некоторой оси, проходящей через начало координат, с угловой скоростью
вращающегося твердого тела относительно некоторой оси, проходящей через начало координат, с угловой скоростью  . Разобьем тело на материальные точки объемом dV и массой dm . Запишем момент импульса для одной материальной точки.
. Разобьем тело на материальные точки объемом dV и массой dm . Запишем момент импульса для одной материальной точки.
 ;
;
Скорость точек при вращательном движении определяется как векторное произведение угловой скорости на радиус вектор точки.
 ;
;
 ;
;
Свернем тензоры Леви-Чивиты.
 ;
;
 ;
;
Просуммировав моменты импульсов всех материальных точек по всему объему тела, найдем момент импульса для тела в целом.
 ;
;
 ;
;
И с учетом обозначения:
 ;
;
Массив из девяти чисел  называется тензором инерции. Тензор инерции выражает зависимость между угловой скоростью и моментом импульса тела. Его координаты определяются распределением масс тела относительно оси вращения.
называется тензором инерции. Тензор инерции выражает зависимость между угловой скоростью и моментом импульса тела. Его координаты определяются распределением масс тела относительно оси вращения.
Используя свойства метрического тензора, получаем связь для контравариантных координат векторов и .
 ;
;
 .
.
Наиболее простые выражения для координат тензора момента инерции мы получаем в декартовой системе координат.
Осевые моменты инерции
 ;
;
В декартовой системе  обозначается –
обозначается –  называется осевым моментом инерции.
называется осевым моментом инерции.
 ;
;
 ;
;
 ;
;
Центробежные моменты инерции
 ;
;
В декартовой системе координат  обозначается
обозначается  и называется центробежным моментом инерции.
и называется центробежным моментом инерции.
 ;
;
 ;
;
 ;
;
В матричной форме:
 .
.
Теперь вычислим кинетическую энергию вращающегося тела. Воспользуемся тем же приемом: разобьем тело на материальные точки и вычислим сначала энергию для одной точки. Дальнейшие преобразования понятны без комментариев.
 ;
;  ;
;  ;
;

 .
.

В матричной форме:
 .
.
..Тензор напряжений
Пусть упругое твердое тело находится в равновесии под действием внешних и внутренних сил. Мысленно вырежем из этого тела элемент в форме параллелепипеда (рис. 52).
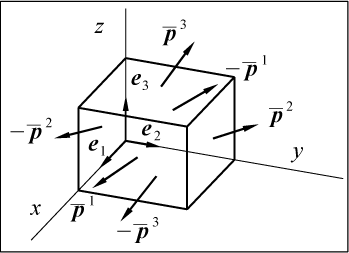 Рис. 52
Рис. 52
Если размеры элемента достаточно малы, то можно считать, что напряжения, действующие в его гранях, постоянны в пределах каждой грани. Кроме того, напряжения на противоположных гранях равны по величине и противоположны по направлению. Напряжения обозначены символом  с индексом, который указывает номер вектора базиса, совпадающего с нормалью к соответствующей грани. Например,
с индексом, который указывает номер вектора базиса, совпадающего с нормалью к соответствующей грани. Например,  – напряжение, которое действует в грани параллелепипеда нормальной к вектору базиса
– напряжение, которое действует в грани параллелепипеда нормальной к вектору базиса  , на рис. 52 это передняя грань параллелепипеда. В противоположной грани, следовательно, действует напряжение
, на рис. 52 это передняя грань параллелепипеда. В противоположной грани, следовательно, действует напряжение  . Отсечем от параллелепипеда тетраэдр, как показано на рис. 53.
. Отсечем от параллелепипеда тетраэдр, как показано на рис. 53.
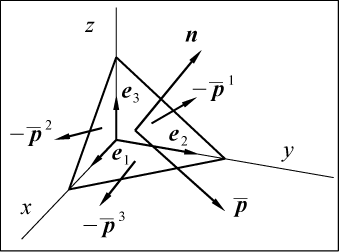 Рис. 53
Рис. 53
Три грани получившегося тетраэдра совпадают с координатными плоскостями, положение четвертой грани задается вектором нормали n . Напряжение, которое действует в четвертой грани неизвестно и мы обозначили его через . Если изменять положение этой плоскости и соответственно и вектора нормали n , то мы будем получать различные значения напряжения . Вектор , следовательно, является векторной функцией вектора нормали n :  . Для того чтобы найти эту функцию, рассмотрим равновесие тетраэдра. Площади граней тетраэдра, в которых действуют напряжения
. Для того чтобы найти эту функцию, рассмотрим равновесие тетраэдра. Площади граней тетраэдра, в которых действуют напряжения  , мы обозначим соответственно
, мы обозначим соответственно  . Площадь четвертой грани обозначим
. Площадь четвертой грани обозначим  . Поскольку тетраэдр находится в равновесии, то сумма всех сил, действующих на него, должна равняться нулю:
. Поскольку тетраэдр находится в равновесии, то сумма всех сил, действующих на него, должна равняться нулю:
 ;
;
Поделив уравнение на и, используя то, что  равно косинусу угла наклона единичной нормали n к координатным осям, получим:
равно косинусу угла наклона единичной нормали n к координатным осям, получим:
 .
.
Разложим каждый из векторов напряжений по векторам базиса:
 .
.
 , и в координатной форме
, и в координатной форме  .
.
Мы получили формулу, позволяющую по положению нормали к плоскости вычислить действующее в этой плоскости напряжение. Коэффициенты  образуют тензор, который называется тензором напряжения. В декартовой системе координат координаты тензора напряжения имеют простой физический смысл: они равны нормальным и касательным напряжениям в соответствующих координатных площадках.
образуют тензор, который называется тензором напряжения. В декартовой системе координат координаты тензора напряжения имеют простой физический смысл: они равны нормальным и касательным напряжениям в соответствующих координатных площадках.
 ;
;  ;
;  ;
;
 ;
;  ;
;  .
.
Нормальное напряжение в произвольной площадке мы можем найти как проекцию вектора напряжения на направление нормали n .
 .
.
Для того, чтобы найти касательное напряжение в плоскости, необходимо задать направление при помощи единичного вектора  , лежащего в этой плоскости. В этом случае касательное напряжение в плоскости с нормалью n в направлении вектора может быть вычислено по формуле:
, лежащего в этой плоскости. В этом случае касательное напряжение в плоскости с нормалью n в направлении вектора может быть вычислено по формуле:
 .
.
До сих пор мы пользовались декартовой координатной системой, но ничто нам не мешает, пользуясь известными правилами, перейти к произвольной системе координат. Выразим векторы и n через их координаты в новой координатной системе.
 ;
;
 ;
;
 , где
, где  .
.
Из этих преобразований следует, что преобразуется вполне по тензорному закону, что оправдывает его название. К сожалению, ясный физический смысл координат тензора в произвольной координатой системе не сохраняется. больше не совпадают с нормальными и касательными напряжениями на соответствующих площадках. Но, несмотря на это, являются координатами вектора напряжения в любой координатной системе. И мы можем воспользоваться этими уравнениями для того, чтобы найти физические напряжения на координатных площадках косоугольной системы координат. Вычислим напряжение на площадке, образованной базисными векторами и  . В качестве нормали используем вектор
. В качестве нормали используем вектор  , который к ним ортогонален.
, который к ним ортогонален.
 ;
;  .
.
Единичный вектор нормали равен  .
.
 ;
;  .
.
Теперь находим напряжение на площадке.
 .
.
Находим проекцию вектора на вектор n , которая и является нормальным напряжением на этой площадке.
 .
.
Аналогичные выражения можно получить и для других координатных площадок. Обозначив напряжение на координатной площадке с вектором нормали  символом
символом  , мы можем записать одно общее уравнение для всех трех площадок:
, мы можем записать одно общее уравнение для всех трех площадок:
 . Здесь и далее суммирование по греческим символам не производится.
. Здесь и далее суммирование по греческим символам не производится.
Мы также можем найти касательные напряжения в координатных площадках в направлении координатных осей, как ортогональные проекции соответствующих векторов напряжений на направления осей.
 , где
, где  .
.
Обозначив касательное напряжение в координатной площадке с вектором нормали в направлении координатной оси  () символом
() символом  , мы можем записать одно общее уравнение для всех шести возможных вариантов:
, мы можем записать одно общее уравнение для всех шести возможных вариантов:
Из полученных выражений следует, что реальные физические напряжения и в координатных площадках косоугольной системы координат не равны координатам тензора напряжения  и сами не образуют тензора.
и сами не образуют тензора.
http://sibsauktf.ru/courses/DiffGeom/dg.htm
http://rdt45m.narod.ru/tenzor_html/tenzor2_3.htm