Вывод уравнения движения математического маятника
«Физика — 11 класс»
Колебания тела можно описать, используя законы Ньютона.
Уравнение движения тела, колеблющегося под действием силы упругости.
Согласно второму закону Ньютона произведение массы тела на ускорение его равно равнодействующей всех сил, приложенных к телу:

Запишем уравнение движения для шарика, движущегося прямолинейно вдоль горизонтали под действием силы упругости Fупр пружины.
Направим ось ОХ вправо. Пусть начало отсчета координат соответствует положению равновесия шарика.

В проекции на ось ОХ уравнение движения можно записать так:
где ах и Fx упр — проекции ускорения и силы упругости пружины на эту ось.
Согласно закону Гука проекция Fx ynp прямо пропорциональна смещению шарика из положения равновесия.
Смещение же равно координате х шарика, причем проекция силы и координата имеют противоположные знаки. Следовательно,
Fx yпp = -kх
Разделив левую и правую части уравнения на массу, получим уравнение, описывающее колебания тела под действием силы упругости:
Проекция ускорения тела прямо пропорциональна его координате, взятой с противоположным знаком.

Так как масса и жесткость пружины — постоянные величины, то их отношение также постоянная величина.
Уравнение движения математического маятника
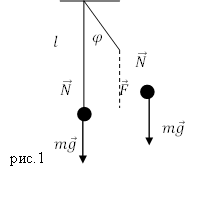
При колебаниях маятника на нерастяжимой нити он все время движется по дуге окружности, радиус которой равен длине нити l.
Положение маятника в любой момент времени определяется одной величиной — углом альфа (α) отклонения нити от вертикали.
Пусть угол α>0, если маятник отклонен вправо от положения равновесия,
и α 0) составляющая силы тяжести Ft направлена влево и ее проекция отрицательна: Ft 0.
Проекция ускорения маятника на касательную к его траектории аt характеризует быстроту изменения модуля скорости маятника.
Поступая налогично выводу форулы для маятника, колеблющегося под действием силы упругости,
получим уравнение движения для математического маятника (нитяного маятника):
Проекция ускорения тела прямо пропорциональна его координате, взятой с противоположным знаком.

где
l — длина нити маятника,
g — ускорение свободного падения,
х — смещение маятника.
Вывод:
Движение маятника на пружине и колебания маятника на нити происходят одинаковым образом, хотя силы, вызывающие колебания, имеют различную физическую природу.
Ускорение прямо пропорционально координате (смещению от положения равновесия).
Колебания в этих двух случаях совершаются под действием сил, равнодействующая которых прямо пропорциональна смещению колеблющегося тела от положения равновесия и направлена в сторону, противоположную этому смещению.
Источник: «Физика — 11 класс», учебник Мякишев, Буховцев, Чаругин
Механические колебания. Физика, учебник для 11 класса — Класс!ная физика
1.1. Уравнение гармонических колебаний
В этом разделе мы покажем, что уравнения колебательного движения многих систем, в сущности, одинаковы, так что различные физические процессы могут быть описаны одними и теми же математическими формулами.
Пружинный маятник — это система, состоящая из шарика массой m, подвешенного на пружине длиной  .
.

Рис. 1.2. К выводу уравнения движения для пружинного маятника
В положении равновесия (рис. 1.2) сила тяжести  уравновешивается упругой силой
уравновешивается упругой силой  :
:


где  – статическое удлинение пружины. Направим ось x вниз и выберем начало отсчета так, что координата x = 0 соответствует положению неподвижного шарика в положении равновесия.
– статическое удлинение пружины. Направим ось x вниз и выберем начало отсчета так, что координата x = 0 соответствует положению неподвижного шарика в положении равновесия.
Если теперь оттянуть шарик от положения равновесия на расстояние x, то полное удлинение пружины станет равным  . По закону Гука проекция результирующей силы на ось ОХ будет тогда равна
. По закону Гука проекция результирующей силы на ось ОХ будет тогда равна



Знак минус означает, что сила стремится уменьшить отклонение от положения равновесия. Полученное выражение соответствует упругой силе слабо деформированной пружины.
Запишем теперь уравнение второго закона Ньютона:

Его можно также представить в виде:

Математический маятник
Математический маятник — это идеализированная система, состоящая из невесомой и нерастяжимой нити, на которой подвешена масса, сосредоточенная в одной точке.
Будем характеризовать отклонение маятника от положения равновесия углом  , который образует нить с вертикалью (рис. 1.3).
, который образует нить с вертикалью (рис. 1.3).

Рис. 1.3. К выводу уравнения движения математического маятника
При отклонении маятника от положения равновесия на материальную точку массой m действуют сила тяжести  и сила натяжения нити
и сила натяжения нити  . Соответственно, уравнение движения этой материальной точки имеет вид
. Соответственно, уравнение движения этой материальной точки имеет вид
 .
.
Проецируя его на направления нормали и касательной к траектории (окружности радиуса  ), получаем
), получаем

Модуль скорости  равен
равен  , учитывая, что при движении точки к положению равновесия угол убывает, а скорость точки растет, напишем
, учитывая, что при движении точки к положению равновесия угол убывает, а скорость точки растет, напишем
 .
.
Тогда второе из написанных выше уравнений движения приобретает вид

При малых отклонениях маятника от вертикали, когда  ,
,


Физический маятник
Физический маятник — это протяженное колеблющееся тело, закрепленное на оси. Его размеры таковы, что его невозможно рассматривать как материальную точку.
Пример физического маятника приведен на рис. 1.4.

Рис. 1.4. К выводу уравнения движения физического маятника
При отклонении маятника от положения равновесия на угол  возникает вращательный момент, стремящийся вернуть маятник в положение равновесия. Этот момент равен
возникает вращательный момент, стремящийся вернуть маятник в положение равновесия. Этот момент равен

где m – масса маятника, а l – расстояние 0C между точкой подвеса 0 и центром масс C маятника.

Рассматривая как вектор, связанный с направлением поворота правилом правого винта, противоположность знаков  и можно объяснить тем, что векторы
и можно объяснить тем, что векторы  и
и  направлены в противоположные стороны. Обозначив момент инерции маятника относительно оси, проходящей через точку подвеса, как I, для маятника можно записать основное уравнение динамики вращательного движения:
направлены в противоположные стороны. Обозначив момент инерции маятника относительно оси, проходящей через точку подвеса, как I, для маятника можно записать основное уравнение динамики вращательного движения:

Ограничимся рассмотрением малых отклонений от положения равновесия:

В этом случае уравнение колебаний принимает вид:

В случае, когда физический маятник можно представить как материальную точку, колеблющуюся на нити длиной l, момент инерции равен

и мы приходим к уравнению (1.6) движения математического маятника.
Колебания поршня в сосуде с идеальным газом
Рассмотрим цилиндр с площадью поперечного сечения  , в который вставлен поршень массы
, в который вставлен поршень массы  (рис. 1.5). Под поршнем в цилиндре идеальный газ с показателем адиабаты
(рис. 1.5). Под поршнем в цилиндре идеальный газ с показателем адиабаты  , над поршнем воздух с постоянным (атмосферным) давлением
, над поршнем воздух с постоянным (атмосферным) давлением  . Поршень может двигаться в цилиндре вверх и вниз без трения. Будем считать, что в равновесии объем идеального газа под поршнем равен
. Поршень может двигаться в цилиндре вверх и вниз без трения. Будем считать, что в равновесии объем идеального газа под поршнем равен  и изменения объема газа, обусловленные движением поршня, происходят адиабатно, то есть без теплообмена со стенками цилиндра и поршнем.
и изменения объема газа, обусловленные движением поршня, происходят адиабатно, то есть без теплообмена со стенками цилиндра и поршнем.

Рис. 1.5. Колебания поршня, закрывающего сосуд с идеальным газом
В состоянии равновесия давление в газе под поршнем складывается из атмосферного давления  и давления
и давления  , оказываемого поршнем. Обозначим это результирующее давление
, оказываемого поршнем. Обозначим это результирующее давление  :
:

Переместим поршень на расстояние x вверх. Объем сосуда увеличится и станет равным

Соответственно уменьшится давление. В силу предположения об отсутствии теплообмена, новое давление в газе можно найти из уравнения адиабаты Пуассона


Здесь  — показатель адиабаты, зависящий от числа степеней свободы молекул газа.
— показатель адиабаты, зависящий от числа степеней свободы молекул газа.
При малых колебаниях, когда изменение объема газа  много меньше его «равновесной» величины
много меньше его «равновесной» величины  , то есть когда
, то есть когда

выражение (1.11) можно разложить в ряд Тейлора:

На поршень действуют три силы: сила атмосферного давления  , сила давления газа под поршнем
, сила давления газа под поршнем  и сила тяжести
и сила тяжести  . Знаки сил соответствуют выбору положительного направления оси x вверх. Используя (1.10) и (1.12), находим для равнодействующей
. Знаки сил соответствуют выбору положительного направления оси x вверх. Используя (1.10) и (1.12), находим для равнодействующей  этих сил:
этих сил:

Используя (1.13), уравнение движения поршня
Формулы математического маятника
Определение и формулы математического маятника
Математический маятник — это колебательная система, являющаяся частным случаем физического маятника, вся масса которого сосредоточена в одной точке, центре масс маятника.
Обычно математический маятник представляют как шарик, подвешенный на длинной невесомой и нерастяжимой нити. Это идеализированная система, совершающая гармонические колебания под действием силы тяжести. Хорошим приближением к математическому маятнику массивный маленький шарик, осуществляющий колебания на тонкой длинной нити.
Галилей первым изучал свойства математического маятника, рассматривая качание паникадила на длинной цепи. Он получил, что период колебаний математического маятника не зависит от амплитуды. Если при запуске мятника отклонять его на разные малые углы, то его колебания будут происходить с одним периодом, но разными амплитудами. Это свойство получило название изохронизма.
Уравнение движения математического маятника
Математический маятник — классический пример гармонического осциллятора. Он совершает гармонические колебания, которые описываются дифференциальным уравнением:
где $\varphi $ — угол отклонения нити (подвеса) от положения равновесия.
Решением уравнения (1) является функция $\varphi (t):$
где $\alpha $ — начальная фаза колебаний; $<\varphi >_0$ — амплитуда колебаний; $<\omega >_0$ — циклическая частота.
Колебания гармонического осциллятора — это важный пример периодического движения. Осциллятор служит моделью во многих задачах классической и квантовой механики.
Циклическая частота и период колебаний математического маятника
Циклическая частота математического маятника зависит только от длины его подвеса:
Период колебаний математического маятника ($T$) в этом случае равен:
Выражение (4) показывает, что период математического маятника зависит только от длины его подвеса (расстояния от точки подвеса до центра тяжести груза) и ускорения свободного падения.
Уравнение энергии для математического маятника
При рассмотрении колебаний механических систем с одной степенью свободы часто берут в качестве исходного не уравнения движения Ньютона, а уравнение энергии. Так как его проще составлять, и оно является уравнением первого порядка по времени. Предположим, что трение в системе отсутствует. Закон сохранения энергии для совершающего свободные колебания математического маятника (колебания малые) запишем как:
где $E_k$ — кинетическая энергия маятника; $E_p$ — потенциальная энергия маятника; $v$ — скорость движения маятника; $x$ — линейное смещение груза маятника от положения равновесия по дуге окружности радиуса $l$, при этом угол — смещение связан с $x$ как:
Максимальное значение потенциальной энергии математического маятника равно:
Максимальная величина кинетической энергии:
где $h_m$ — максимальная высота подъема маятника; $x_m$- максимальное отклонение маятника от положения равновесия; $v_m=<\omega >_0x_m$ — максимальная скорость.
Примеры задач с решением
Задание. Какова максимальная высота подъема шарика математического маятника, если его скорость движения при прохождении положения равновесия составляла $v$?
Решение. Сделаем рисунок.
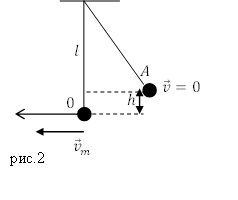
Пусть ноль потенциальной энергии шарика в его положении равновесия (точка 0).В этой точке скорость шарика максимальна и равна по условию задачи $v$. В точке максимального подъема шарика над положением равновесия (точка A), скорость шарика равна нулю, потенциальная энергия максимальна. Запишем закон сохранения энергии для рассмотренных двух положений шарика:
Из уравнения (1.1) найдем искомую высоту:
Ответ. $h=\frac
Задание. Каково ускорение силы тяжести, если математический маятник имеющий длину $l=1\ м$, совершает колебания с периодом равным $T=2\ с$? Считайте колебания математического маятника малыми.\textit<>
Решение. За основу решения задачи примем формулу для вычисления периода малых колебаний:
Выразим из нее ускорение:
Проведем вычисления ускорения силы тяжести:
Ответ. $g=9,87\ \frac<м><с^2>$
http://online.mephi.ru/courses/physics/optics/data/course/1/1.1.html
http://www.webmath.ru/poleznoe/fizika/fizika_149_formuly_matematicheskogo_majatnika.php