Момент инерции стержня однородного и тонкого. Использование теоремы Штейнера. Пример задачи

В физике для описания инерционных качеств поступательного или линейного движения пользуются понятием массы тела. Если же движение рассматривается вокруг некоторой оси вращения, то используют несколько иную физическую характеристику — момент инерции. В данной статье рассмотрим, что это за величина и как можно рассчитать момент инерции тонкого стержня.
Вращение и момент инерции
Инерции момент проще всего ввести для материальной точки. Когда она, обладая массой M, вращается вокруг оси, описывая окружность радиусом R, то момент инерции для нее определяется по формуле:
Любое реальное тело, какой бы сложной геометрической формой оно не обладало, можно представить как совокупность материальных точек. Это означает, что для всего тела или системы твердых тел величину I можно вычислить, если проинтегрировать по элементарным массам dm выражение выше. Общая формула для определения момента инерции имеет вид:
Через объем и плотность это равенство записывается в таком виде:
Его часто применяют для вычисления значений I конкретных геометрических объектов.
Физический смысл инерции момента I заключается в том, что он определяет, насколько «сложно» данной силе, создающей некоторый крутящий момент, раскрутить или остановить вращающуюся систему. Иными словами, I характеризует инерционные свойства изучаемой системы.
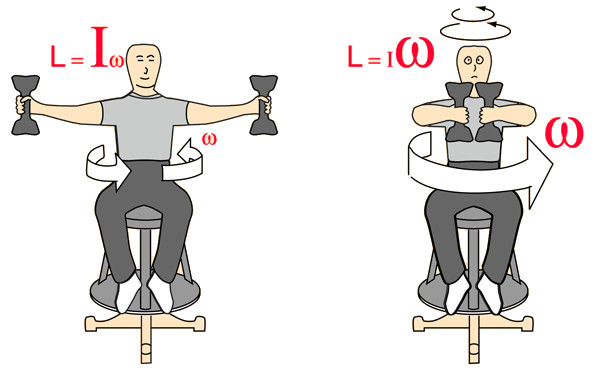
Самым известным примером использования момента инерции является маховик двигателя внутреннего сгорания в автомобилях. Благодаря большому значению величины I, маховик обеспечивает плавность движения автомобиля, сглаживая любые резкие воздействия на коленчатый вал. Пример иного характера, где также важно знать момент инерции, — это закон сохранения момента импульса. Применяется он для поворота вокруг оси искусственных спутников в космическом пространстве Земли.
Тонкий стержень и оси вращения
Далее будет рассмотрен момент инерции стержня относительно осей (разных). Вычисления будут проводиться для тонкого стержня, который обладает однородным распределением массы, то есть его плотность во всех точках является постоянной величиной. Под тонким понимают такой стержень, у которого ширина (толщина) намного меньше, чем его длина L. Для обозначения его массы будем использовать букву M.
Из приведенных выше формул следует, что величина I зависит от относительного положения тела и оси вращения. Для стержня можно выделить три основных оси. Одна из них проходит через длину всего стержня. Поскольку его толщина стремится к нулю, то момент инерции для такого положения тела также будет стремиться к этому значению.
Две другие оси перпендикулярны длине рассматриваемого тела. Одна из них проходит через центр масс, назовем ее O1, вторая — через конец стержня, обозначим ее O2. Относительно них и вычислим величину I.
Момент инерции относительно O1

В первую очередь выпишем общую формулу. Имеем:
Обозначим площадь сечения стержня буквой S. Очевидно, что она стремится к нулю, поскольку стержень тонкий. Но это обозначение удобно ввести для выполнения дальнейших расчетов.
Теперь мысленно разобьем стержень на бесконечное количество мелких кусочков, каждый из которых будет иметь сечение S и толщину dl. Заменяя r на l в формуле выше, получаем:
Остается только подставить правильные пределы интегрирования и записать конечную формулу. Поскольку ось O1 проходит через середину стержня, то пределы интегрирования будут следующими:
Результатом вычисления этого интеграла является следующая формула:
Таким образом, момент инерции тонкого стержня определяется его массой и длиной.
Инерции момент относительно O2
Теперь рассмотрим ситуацию, когда ось вращения будет проходить через любой из концов стержня и будет ему перпендикулярна. Соответствующую формулу можно получить из записанного выше интеграла, если правильно подставить пределы интегрирования. Однако мы пойдем несколько иным путем и определим инерции момент с помощью теоремы Штейнера.
Она говорит о том, что если две оси являются параллельными друг другу и одна из них (ось O) проходит через центр масс тела, то момент инерции относительно второй оси может быть вычислен с помощью такого равенства:
Здесь I0 — момент инерции стержня относительно оси O, h — дистанция между осями.
Эту формулу можно с успехом применить для нашего случая. Поскольку I0 мы рассчитали в предыдущем пункте статьи относительно оси O1, и расстояние между O1 и O2 составляет L/2, то с использованием теоремы Штейнера получаем следующий результат:
Таким образом, для стержня величина I относительно оси O2 в 4 раза больше, чем относительно оси O1. Это означает, что для придания одинакового углового ускорения стержню в случае вращения вокруг оси O2 следует приложить в 4 раза больший крутящий момент, чем в случае оси O1.
Пример задачи
Дан тонкий стержень длиною 0,5 м и массой 5 кг. На расстоянии 2/5 от его конца расположена ось вращения, перпендикулярная стержню. Чему равен момент инерции системы?
Для решения задачи воспользуемся теоремой Штейнера. Расстояние между осями O1 и заданной в задаче равно:
Тогда получаем момент инерции стержня (однородного):
I = I0 + M*h 2 = 5*0,5 2 /12 + 5*0,05 2 = 0,117 кг*м 2 .
В СИ момент инерции стержня измеряется в указанных единицах.
7.1. Динамика вращения вокруг неподвижной оси
Движение материальной точки характеризуется перемещением, скоростью, ускорением. Но при вращении твердого тела все его элементы имеют разные перемещения, различные скорости. Удобно найти переменные, одинаковые для всех элементов твердого тела. Мы их, собственно, уже знаем — угол поворота, угловая скорость, угловое ускорение. Соответственно, изучая динамику вращения, вместо импульса и силы мы будем оперировать их угловыми аналогами — моментом импульса и моментом силы.
Уравнение движения. В теме 4.8 было выведено уравнение движения системы материальных точек в виде

где моменты импульса и силы определялись как

Внутренние силы между телами системы, напомним, выпали из уравнений движения. Абсолютно твердое тело можно рассматривать как систему частиц (материальных точек) с неизменными расстояниями между ними. Поэтому выписанные уравнения применимы для твердого тела, а неизменность расстояний между его точками позволяет характеризовать вращение тела вокруг неподвижной оси единственной координатой — углом поворота. Поэтому мы можем упростить приведенное выше уравнение движения. Прежде всего, нас не интересуют в данный момент напряжения, возникающие в оси. Кроме того, для описания вращения достаточно рассмотреть проекции векторов моментов импульса и силы на ось вращения.

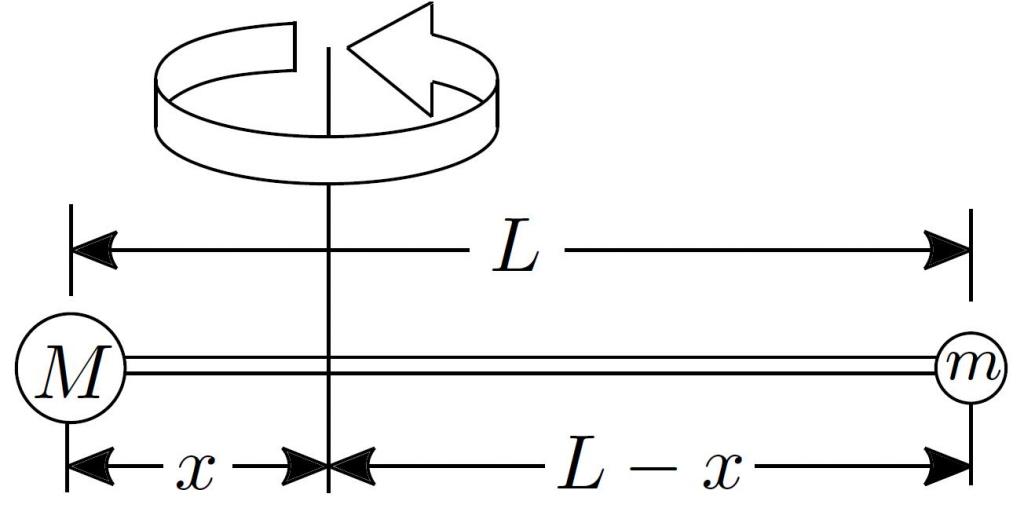
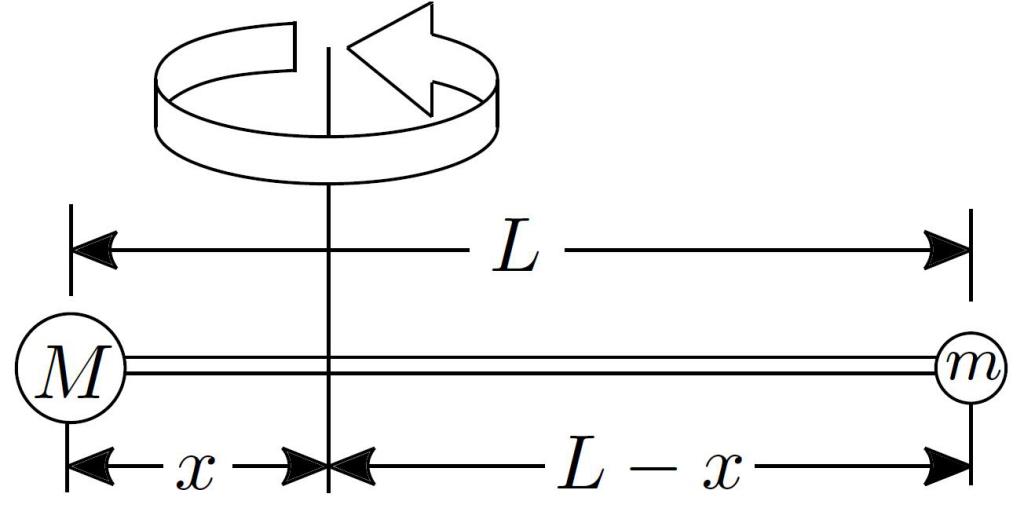
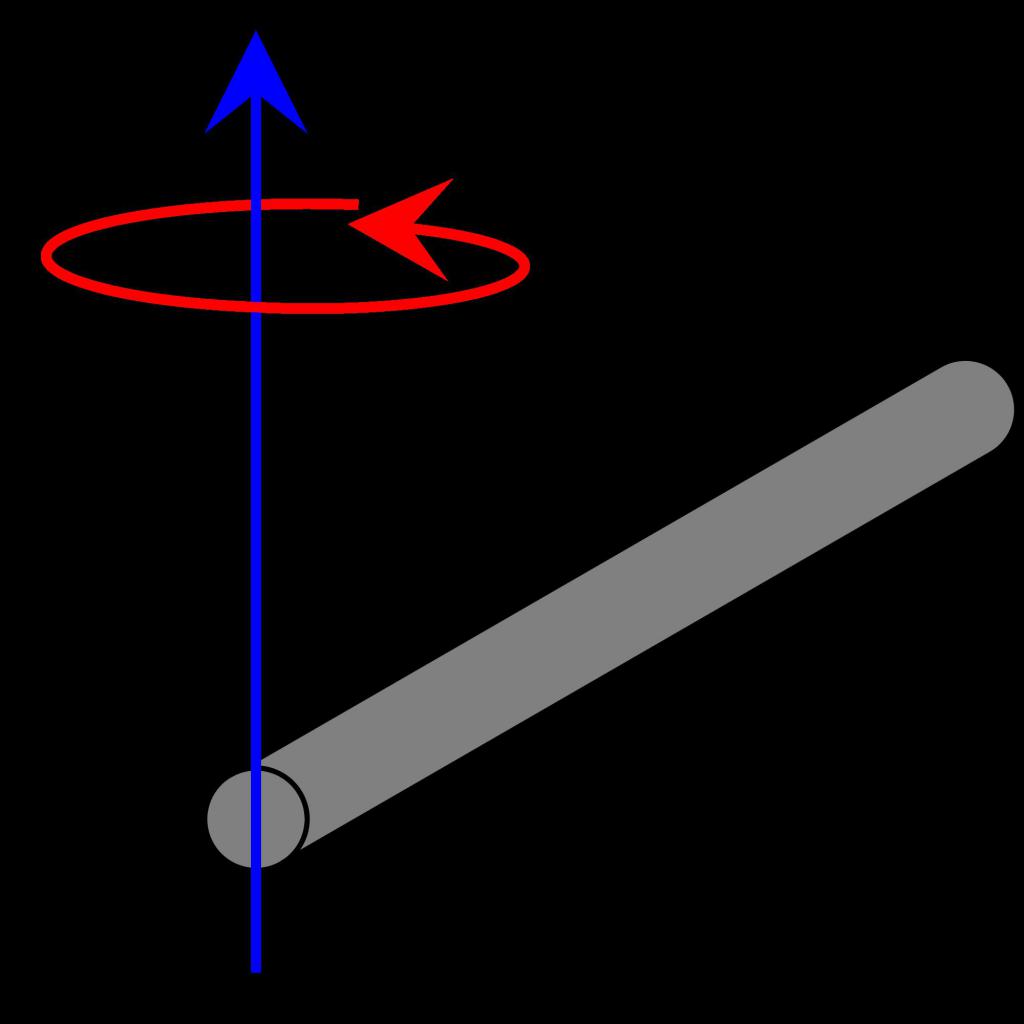
Рис. 7.1. Момент импульса L двух шаров массы m, соединенных стержнем. Вся система вращается вокруг оси z c угловой скоростью ω
Направим ось z вдоль оси вращения и выделим в твердом теле элемент массой  , положение которого характеризуется радиус-вектором
, положение которого характеризуется радиус-вектором  (рис. 7.2).
(рис. 7.2).

Рис. 7.2 Вращение твердого тела вокруг неподвижной оси 0z
Момент импульса этого элемента есть

Рис. 7.3. Момент импульса системы направлен вдоль оси вращения.
Радиус-вектор можно представить как сумму его проекций на ось z и плоскость ху :

где вектор  лежит в плоскости вращения и направлен от оси к выделенному элементу (см. рис. 7.1). Имеем:
лежит в плоскости вращения и направлен от оси к выделенному элементу (см. рис. 7.1). Имеем:

Первое слагаемое — вектор, направленный противоположно Поэтому оно не дает вклада в z-компоненту момента импульса. Второе слагаемое — вектор, направленный вдоль оси z. Так как



Суммируя по всем элементам тела, получаем


Величина  называется моментом инерции тела.
называется моментом инерции тела.
Говоря о моменте инерции, всегда указывают, относительно какой именно оси вращения он определен (в данном случае — это ось z). Момент инерции того же тела относительно какой-то другой оси примет иное значение. Сохраняется только общее правило его вычисления: берется сумма по элементам массы, составляющим тело, умноженным на квадраты расстояний этих элементов массы до оси вращения.
В случае непрерывного распределения масс с плотностью  сумма заменится на интеграл по всему объему тела:
сумма заменится на интеграл по всему объему тела:

Если тело однородно, то его плотность во всех точках постоянна и можно вынести из-под знака интеграла.
Записываем теперь уравнение движения в проекции на ось z :

Если момент инерции не зависит от времени, то дифференцировать нужно только угловую скорость, в результате получаем основное уравнение динамики вращательного движения твердого тела в виде

Производная угловой скорости по времени — это угловое ускорение

Видео 7.1. Основное уравнение динамики вращательного движения. Демонстрация, вытекающей из него связи между угловым ускорением, моментом силы и моментом инерции
Рассмотрим теперь момент внешних сил. Разложим силу  на вектор в направлении оси z и вектор, ей ортогональный:
на вектор в направлении оси z и вектор, ей ортогональный:

Используя снова аналогичное разложение радиус-вектора
получаем для момента внешних сил  :
:

Первое слагаемое равно нулю. Два следующих содержат единичный орт — вектор k, направленный вдоль оси 0z и, следовательно, не дают вклада в проекцию  . Оба вектора
. Оба вектора

лежат в плоскости xy и, следовательно, последнее слагаемое направлено параллельно оси 0z. Если  — угол между этими векторами, то
— угол между этими векторами, то

где  — плечо силы (см. тему. 4.8). Силу
— плечо силы (см. тему. 4.8). Силу

надо здесь понимать в алгебраическом смысле: она входит со знаком минус, если сила тормозит вращение.
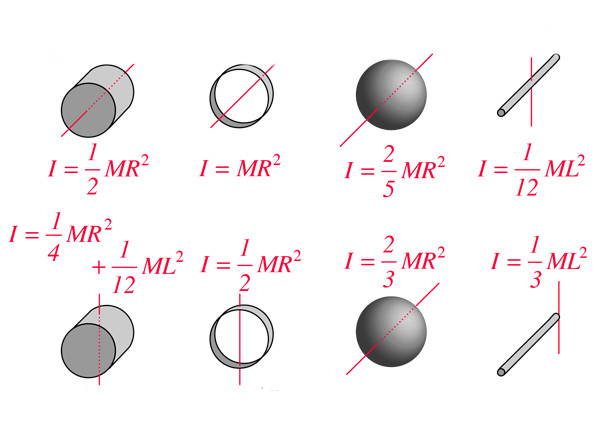
Момент инерции. Найдем моменты инерции для простейших (геометрически правильных) форм твердого тела, масса которого равномерно распределена по объему.

Рис. 7.4. Моменты инерции различных тел
1. Момент инерции обруча относительно оси, перпендикулярной к его плоскости и проходящей через его центр.
Обруч считается бесконечно тонким, то есть толщиной обода можно пренебречь по сравнению с радиусом  . Поскольку в этой системе все массы находятся на одинаковом расстоянии от оси вращения,
. Поскольку в этой системе все массы находятся на одинаковом расстоянии от оси вращения,  можно вынести из-под знака интеграла:
можно вынести из-под знака интеграла:

где  — полная масса обруча.
— полная масса обруча.
2. Момент инерции диска относительно оси, перпендикулярной его плоскости и проходящей через центр.
Диск считается бесконечно тонким, если его толщина много меньше радиуса . Момент инерции, согласно определению, величина аддитивная: момент инерции целого тела равен сумме моментов инерции его частей. Разобьем диск на бесконечно тонкие обручи радиусом  и шириной
и шириной  (рис. 7.5).
(рис. 7.5).

Рис. 7.5 Вычисление момента инерции диска относительно оси z, перпендикулярной его плоскости и проходящей через центр
Площадь поверхности обруча равна произведению его длины окружности на ширину:  . Поскольку масса m диска распределена равномерно, масса единицы площади равна
. Поскольку масса m диска распределена равномерно, масса единицы площади равна  , так что масса обруча равна
, так что масса обруча равна

Момент инерции обруча мы уже знаем:

Осталось просуммировать моменты инерции всех таких обручей:

Такой же результат получится и для момента инерции цилиндра конечной длины относительно его продольной оси.
3. Момент инерции шара относительно его диаметра.
Поступим аналогичным образом: «нарежем» шар на бесконечно тонкие диски толщиной  , находящиеся на расстоянии z от центра (рис. 7.6).
, находящиеся на расстоянии z от центра (рис. 7.6).

Рис. 7.6. Момент инерции шара относительно его диаметра
Радиус такого диска

Объем диска  равен его площади, умноженной на толщину:
равен его площади, умноженной на толщину:

Массу диска  находим, разделив массу шара на его объем
находим, разделив массу шара на его объем  и умножив на объем диска:
и умножив на объем диска:

Момент инерции диска был найден выше. В применении к данному случаю он равен

Момент инерции шара находится интегрированием по всем таким дискам:

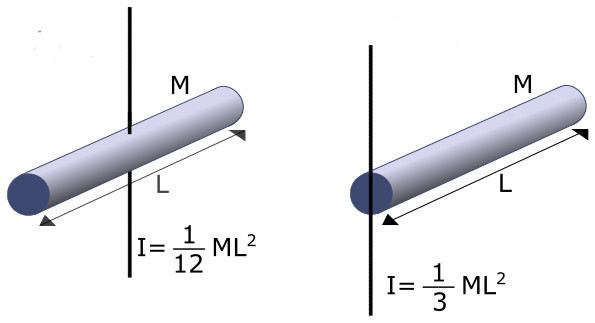
4. Момент инерции тонкого стержня относительно оси, проходящей через его середину перпендикулярно стержню.
Пусть стержень имеет длину  . Направим ось x вдоль стержня. Начало координат по условию находится в центре стержня (рис. 7.7).
. Направим ось x вдоль стержня. Начало координат по условию находится в центре стержня (рис. 7.7).

Рис. 7.7. Момент инерции тонкого стержня относительно оси, проходящей через его середину перпендикулярно стержню
Возьмем элемент стержня длиной  , находящийся на расстоянии x от оси вращения. Его масса равна
, находящийся на расстоянии x от оси вращения. Его масса равна

а момент инерции

Отсюда находим момент инерции стержня:

Теорема Штейнера. В приведенных примерах оси проходят через центр масс (центр инерции) тела. Момент инерции относительно других осей вращения определяется в соответствии с теоремой Штейнера:

Рис. 7.8. К выводу теоремы Штейнера
Момент инерции тела относительно произвольной оси равен сумме момента инерции JC относительно параллельной оси, проходящей через центр инерции тела, и величины ma 2 — произведения массы тела на квадрат расстояния от центра инерции тела до выбранной оси, то есть

Продемонстрируем сначала применение теоремы Штейнера. Вычислим момент инерции тонкого стержня относительно оси, проходящей через его край перпендикулярно стержню. Прямое вычисление сводится к тому же интегралу, возникшему при вычислении момента инерции стержня относительно оси, проходящей через его середину, но взятому в других пределах:

Расстояние до оси, проходящей через центр масс, равно a = l/2. По теореме Штейнера получаем тот же результат:

Вывод теоремы Штейнера иллюстрируется рис. 7.8, 7.9

Рис. 7.9. К выводу теоремы Штейнера
Пусть одна ось проходит в направлении единичного вектора n через центр масс С твердого тела (системы тел), а другая — параллельно ей через некоторую точку 0. Из центра масс в направлении второй оси проводим ортогональный осям вектор a, который определяет положение точки 0. Радиус-векторы некоторого элемента системы массой  относительно точек С и 0 обозначаем
относительно точек С и 0 обозначаем  и
и  , соответственно. Момент инерции этого элемента относительно оси С есть
, соответственно. Момент инерции этого элемента относительно оси С есть

где  — расстояние элемента от оси. По теореме Пифагора (см. рис. 7.9).
— расстояние элемента от оси. По теореме Пифагора (см. рис. 7.9).

Катет  равен проекции векторов и на ось вращения, то есть
равен проекции векторов и на ось вращения, то есть

Используя эти выражения и суммируя по всем элементам системы, находим момент инерции относительно оси, проходящей через точку С, и, аналогичным образом, момент инерции относительно параллельной оси, проходящей через точку 0 :

Здесь выражение для  получено из
получено из  простой заменой на .
простой заменой на .
Как видно из рис. 7.9, векторы и связаны между собой:


так как векторы n и а ортогональны и их скалярное произведение

Тогда мы можем преобразовать выражение для :

Первое слагаемое в правой части — момент инерции относительно оси, проходящей через точку C. Третье слагаемое равно  , где
, где

— полная масса системы.
Второе слагаемое равно нулю, так как оно пропорционально радиус-вектору центра инерции относительно самого центра инерции. Окончательно:

что и требовалось доказать.
Теорема Штейнера связывает моменты инерции относительно параллельных осей. Иногда оказывается полезной другая теорема, связывающая моменты инерции относительно трех взаимно перпендикулярных осей. Однако эта теорема относится только к плоским фигурам, толщиной которых можно пренебречь по сравнению с размерами в двух других направлениях. Итак, теорема о моментах инерции плоских фигур:
Если через произвольную точку 0 плоской фигуры приведена ортогональная к фигуре ось, то момент инерции относительно этой оси равен сумме моментов инерции относительно двух взаимно перпендикулярных осей, лежащих в плоскости фигуры и проходящих через эту же точку 0.
Иными словами, берем на фигуре произвольную точку 0 и проводим координатные оси так, чтобы 0x и 0y лежали в плоскости фигуры. Тогда, согласно теореме, момент инерции относительно оси 0z равен сумме моментов инерции относительно осей 0x и 0y:

При этом расположение осей 0x, 0y может быть произвольным; главное, чтобы они лежали в плоскости фигуры (рис. 7.10).

Рис. 7.10. Моменты инерции плоской фигуры относительно взаимно перпендикулярных осей
Из рисунка видно, что

что и требовалось доказать.
Найдем, например, момент инерции  диска относительно его диаметра. Два ортогональных диаметра диска равноправны, поэтому
диска относительно его диаметра. Два ортогональных диаметра диска равноправны, поэтому

Согласно теореме о плоской фигуре


Теперь можно применить теорему Штейнера, чтобы найти, например, момент инерции  относительно оси
относительно оси  , параллельной диаметру и проходящей через край диска (см. рис. 7.10):
, параллельной диаметру и проходящей через край диска (см. рис. 7.10):
Что такое момент инерции: формулы для стержня и колеса
Любые перемещения тел в пространстве, траектория которых является окружностью, предполагают знание не только угловой скорости, но и момента инерции для описания этого движения. Что такое момент инерции, а также чему он равен для стержня и колеса, ответит данная статья.
Вращение и момент инерции
Физическая величина, которая называется моментом инерции, обозначается, как правило, буквой I и появляется в физике при рассмотрении момента импульса материальной точки, которая вращается вокруг оси. Момент импульса L в скалярной форме записывается следующим выражением:
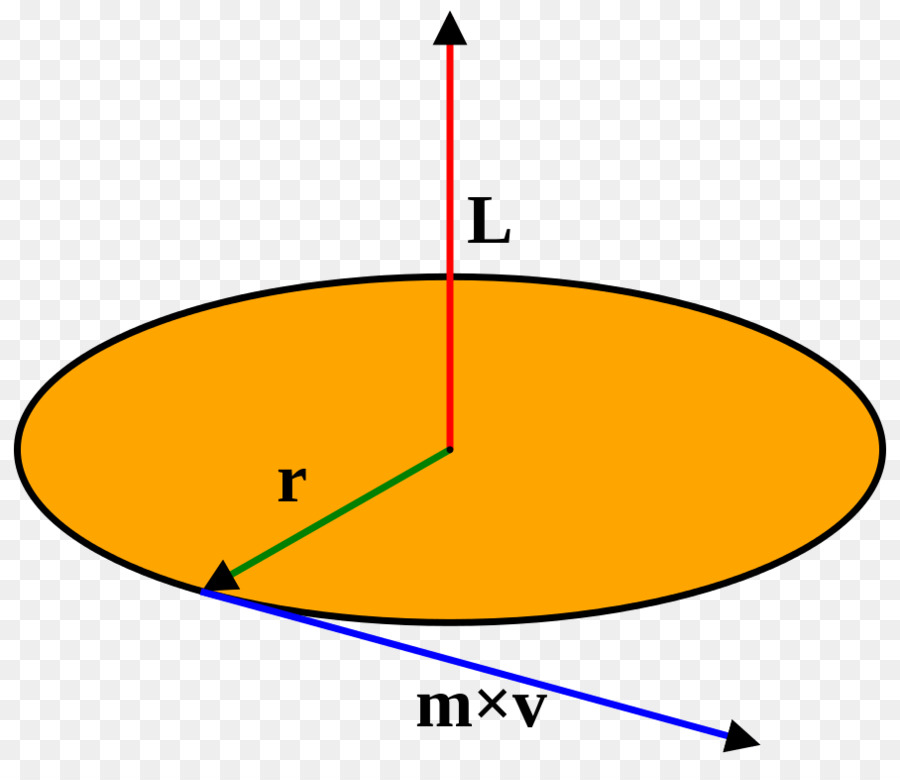
Здесь r — дистанция до оси материальной точки, m — ее масса, v — линейная скорость. Используя связь последней со скоростью угловой ω, получаем выражение:
L = r 2 *m*ω, где ω = v/r
Отвечая на вопрос о том, что такое момент инерции, следует сказать, что это величина I = r 2 *m. То есть она зависит от массы вращающегося объекта, быстро растет с увеличением расстояния до оси и измеряется в кг*м 2 .
Общее выражение для момента инерции
Введенная в предыдущем пункте формула для величины I справедлива, если размеры объекта пренебрежимо малы по сравнению с дистанцией до оси r (вращение Земли вокруг нашей звезды). Если же линейные размеры объекта становятся сравнимыми с расстоянием r, тогда необходимо для вычисления I пользоваться более общей формулой, которая дана ниже:
Из нее видно, что подынтегральное выражение представляет собой момент инерции материальной точки. Сумма же всех моментов от точек с массой dm составляет полный момент инерции I для всего тела.
Эта формула является мощным инструментом для определения I тела абсолютно любой формы. Согласно формуле величина I является аддитивной, то есть позволяет разбить тело на отдельные части, вычислить их моменты инерции, а затем сложить полученные результаты для получения величины I тела.
Физический смысл величины I
Зная, что такое момент инерции, необходимо сказать несколько слов о том, как его значение отражается на поведении и характеристиках вращения реальных объектов.
Большая величина I приводит к тому, что тело очень тяжело раскрутить вокруг оси. Для этого приходится выполнить значительную работу и приложить существенные усилия. Примером тела с большим I является автомобильный маховик — тяжелый металлический диск, жестко закрепленный на коленвале двигателя. Наоборот, если величина I системы невелика, то ее можно быстро раскрутить и так же быстро и легко остановить. Примером для этого случая является алюминиевый обод велосипедного колеса.
Приведенное выше обсуждение говорит о том, что момент инерции характеризуется инерционностью процесса вращения, то есть выполняет ту же самую роль, что и масса тела при приложении к ней силы с целью придания ускорения.
Отличие массы и момента инерции заключается не только в единицах измерения, но и в том, что последний является функцией вращательной системы, а не только геометрии тела и его массы.
Момент инерции относительно оси вращения, пересекающей центр масс стержня
Рассмотрим пример использования интегральной формулы для решения реальных задач. Первым делом решим простую проблему: имеется стержень тонкий длиной l и массой m. Вращения оси проходит перпендикулярно этому стержню через центр массы объекта. Необходимо определить величину I для этой системы.

Выпишем общую формулу для инерции момента стержня относительно оси, имеем:
Поскольку ось перпендикулярна рассматриваемому телу, и сам стержень имеет бесконечно малую толщину, то можно мысленно разрезать его на тонкие слои плоскостями, параллельными оси. В таком случае получаем, что элемент массой dm может быть представлен следующим равенством:
Здесь ρ — плотность материала, S — поперечное сечение, которое является постоянной величиной и стремится к нулю (стержень бесконечно тонкий). Подставим это выражение в общую формулу:
Заметим, что подставленные пределы интегрирования по r соответствуют условию задачи (ось делит стержень на две равные части). Выполняя интегрирование, получаем:
I = ρ*S*(r 3 /3)| +l/2 -l/2 = m*l 2 /12, где m = ρ*S*l
Таким образом, момент инерции стержня тонкого, когда ось проходит через центр масс, в 12 раз меньше такового для материальной точки той же массы, находящейся на расстоянии l от оси.
Величина I для стержня с осью вращения на конце объекта
Рассмотрим, что такое момент инерции, в несколько иной ситуации. Имеем тот же самый объект (тонкий стержень), но теперь ось проходит через конец. Как изменится момент инерции в этом случае? Применяем тот же метод разбиения стержня и последующего интегрирования, как в предыдущем пункте, получаем:
Заметим, что изменились лишь пределы интегрирования. Решением будет следующее равенство:
Выражение показывает, что тот же самый стержень будет обладать в 4 раза большим моментом инерции (труднее раскрутить), если ось вращения переместить с его центра на край.
Рассматривая решение этих двух задач, следует сделать важный вывод: при расчете величины I нельзя сводить всю массу объекта в его центр и выполнять расчет, как для материальной точки. Вычисление следует проводить только с использованием интегрального выражения.
Значение I для колеса со спицами
Момент инерции колеса можно определить, используя свойство аддитивности рассматриваемой величины. Для этого мысленно разберем колесо на отдельные части, которые представляют собой спицы и обод. Поскольку спица — это тонкий стержень, и ось ее вращения проходит через конец, то для нее справедлива формула, полученная в предыдущем пункте.
Что касается обода колеса, то его момент инерции аналогичен таковому для материальной точки, находящейся на расстоянии радиуса колеса и имеющей массу обода.

Складывая моменты инерции всех элементов, получаем:
Здесь mc и mo — массы спицы и обода, соответственно, n — число спиц. Если все спицы весят намного меньше обода, тогда момент инерции колеса будет равен:
http://online.mephi.ru/courses/physics/osnovi_mehaniki/data/lecture/7/p1.html
http://www.syl.ru/article/430202/chto-takoe-moment-inertsii-formulyi-dlya-sterjnya-i-kolesa