Метод Эйлера решения задачи Коши для ОДУ 1 порядка.
Одношаговые методы рассмотрим на примере решения обыкновенного дифференциального уравнения первого порядка вида
| y’ = f (x,y) , | (7.2) |
при начальном условии
| y(x0) = y0. | (7.2’) |
С помощью этих методов вычисляют последовательные значения y, соответствующие дискретным значениям независимой переменной x.
Метод Эйлера —это простейший метод решения задачи Коши, позволяющий интегрировать дифференциальные уравнения первого порядка. Его точность невелика, и поэтому на практике им пользуются сравнительно редко. Однако на основе этого метода легче понять алгоритмы других, более эффективных методов.
Итак, решается задача Коши (7.2, 7.2’). Запишем разложение  для m=0, отбросим в нем члены, содержащие h во второй и более высоких степенях, и получим:
для m=0, отбросим в нем члены, содержащие h во второй и более высоких степенях, и получим:
 . . | (7.5) |
Величину  находим из дифференциального уравнения (7.2), подставив в него начальное условие:
находим из дифференциального уравнения (7.2), подставив в него начальное условие:  . Таким образом можно получить приближенное значение зависимой переменной при малом смещении h от начальной точки.
. Таким образом можно получить приближенное значение зависимой переменной при малом смещении h от начальной точки.
Этот процесс можно продолжить, используя соотношение
 | (7.6) |
и делая сколь угодно много шагов. Графически метод Эйлера показан на рис.7.3. Хотя тангенс угла наклона касательной к истинной кривой в исходной точке известен и равен y’(x0), он изменяется в соответствии с изменением независимой переменной. Поэтому в точке x0+h наклон касательной уже не таков, каким он был в точке x0. Следовательно, при сохранении начального наклона касательной на всем интервале [x0,x1] в результаты вносится погрешность. Ошибка метода имеет порядок h 2 , а сам метод является методом первого порядка, так как в его вычислительной формуле (7.6) параметр h имеет максимальную степень -1.
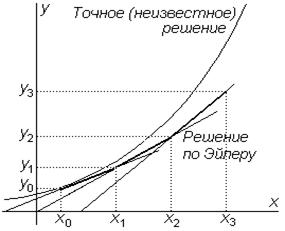 Рис.7.3. Геометрическая интерпретация метода Эйлера Рис.7.3. Геометрическая интерпретация метода Эйлера |  Рис.7.4. Ошибка метода Эйлера на m-м шаге Рис.7.4. Ошибка метода Эйлера на m-м шаге |
Дата добавления: 2015-01-15 ; просмотров: 1907 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Задачи с начальными условиями для систем обыкновенных дифференциальных уравнений
Рассмотрим задачу Коши для системы обыкновенных дифференциальных уравнений $$ \begin
Используя векторные обозначения, задачу (1), (2) можно записать как задачу Коши $$ \begin
Численные методы решения задачи Коши
Существует большое количество методов численного решения задачи (3), (4). Вначале рассмотрим простейший явный метод Эйлера и его программную реализацию. Затем будут представлены методы Рунге—Кутта и многошаговые методы.
При построении численных алгоритмов будем считать, что решение этой дифференциальной задачи существует, оно единственно и обладает необходимыми свойствами гладкости.
Идея численных методов решения задачи (3), (4) состоит из четырех частей:
1. Вводится расчетная сетка по переменной \( t \) (время) из \( N_t + 1 \) точки \( t_0 \), \( t_1 \), \( \ldots \), \( t_
2. Предполагаем, что дифференциальное уравнение выполнено в узлах сетки.
3. Аппроксимируем производные конечными разностями.
4. Формулируем алгоритм, который вычисляет новые значения \( \pmb
Явный метод Эйлера
Проиллюстрируем указанные шаги. Для начала введем расчетную сетку. Очень часто сетка является равномерной, т.е. имеет одинаковое расстояние между узлами \( t_n \) и \( t_
Затем, предполагаем, что уравнение выполнено в узлах сетки, т.е.: $$ \pmb^\prime (t_n) = \pmb
Заменяем производные конечными разностями. С этой целью, нам нужно знать конкретные формулы, как производные могут быть аппроксимированы конечными разностями. Простейший подход заключается в использовании определения производной: $$ \pmb^\prime(t) = \lim_ <\tau \to 0>\frac<\pmb(t+\tau) — \pmb(t)><\tau>. $$
В произвольном узле сетки \( t_n \) это определение можно переписать в виде: $$ \begin
Четвертый шаг заключается в получении численного алгоритма. Из (5) следует, что мы должны знать значение \( y^n \) для того, чтобы решить уравнение (5) относительно \( y^
При условии, что у нас известно начальное значение \( \pmb
Программная реализация явного метода Эйлера
Выражение (6) может быть как скалярным так и векторным уравнением. И в скалярном и в векторном случае на языке Python его можно реализовать следующим образом
При решении системы (векторный случай), u[n] — одномерный массив numpy длины \( m+1 \) (\( m \) — размерность задачи), а функция F должна возвращать numpy -массив размерности \( m+1 \), t[n] — значение в момент времени \( t_n \).
Таким образом численное решение на отрезке \( [0, T] \) должно быть представлено двумерным массивом, инициализируемым нулями u = np.zeros((N_t+1, m+1)) . Первый индекс соответствует временному слою, а второй компоненте вектора решения на соответствующем временном слое. Использование только одного индекса, u[n] или, что то же самое, u[n, :] , соответствует всем компонентам вектора решения.
Функция euler решения системы уравнений реализована в файле euler.py:
Строка F_ = lambda . требует пояснений. Для пользователя, решающего систему ОДУ, удобно задавать функцию правой части в виде списка компонент. Можно, конечно, требовать чтобы пользователь возвращал из функции массив numpy , но очень легко осуществлять преобразование в самой функции решателе. Чтобы быть уверенным, что результат F будет нужным массивом, который можно использовать в векторных вычислениях, мы вводим новую функцию F_ , которая вызывает пользовательскую функцию F «прогоняет» результат через функцию assaray модуля numpy .
Неявный метод Эйлера
При построении неявного метода Эйлера значение функции \( F \) берется на новом временном слое, т.е. для решении задачи (5) используется следующий метод: $$ \begin
Таким образом для нахождения приближенного значения искомой функции на новом временном слое \( t_
Для решения уравнения (8) можно использовать, например, метод Ньютона.
Программная реализация неявного метода Эйлера
Функция backward_euler решения системы уравнений реализована в файле euler.py:
Отметим, что для нахождения значения u[n+1] используется функция fsolve модуля optimize библиотеки scipy . В качестве начального приближения для решения нелинейного уравнения используется значение искомой функции с предыдущего слоя u[n] .
Методы Рунге—Кутта
Одношаговый метод Рунге—Кутта в общем виде записывается следующим образом: $$ \begin
Одним из наиболее распространенных является явный метод Рунге-Кутта четвертого порядка: $$ \begin
Многошаговые методы
В методах Рунге—Кутта в вычислениях участвуют значения приближенного решения только в двух соседних узлах \( \pmb
Различные варианты многошаговых методов (методы Адамса) решения задачи с начальными условиями для систем обыкновенных дифференциальных уравнений могут быть получены на основе использования квадратурных формул для правой части равенства $$ \begin
Для получения неявного многошагового метода используем для подынтегральной функции интерполяционную формулу по значениям функции \( \pmb
Для интерполяционного метода Адамса (15) наивысший порядок аппроксимации равен \( m+1 \).
Для построения явных многошаговых методов можно использовать процедуру экстраполяции подынтегральной функции в правой части (14). В этом случае приближение осуществляется по значениям \( \pmb
Для экстраполяционного метода Адамса (16) погрешность аппроксимации имеет \( m \)-ый порядок.
На основе методов Адамса строятся и схемы предиктор–корректор. На этапе предиктор используется явный метод Адамса, на этапе корректора — аналог неявного метода Адамса. Например, при использовании методов третьего порядка аппроксимации в соответствии с (18) для предсказания решения положим $$ \frac<\pmb
Жесткие системы ОДУ
При численном решении задачи Коши для систем обыкновенных дифференциальных уравнений (3), (4) могут возникнуть дополнительные трудности, порожденные жесткостью системы. Локальные особенности поведения решения в точке \( u = w \) передаются линейной системой $$ \begin
Пусть \( \lambda_i(t) \), \( i = 1, 2, \ldots, m \) — собственные числа матрицы $$ \begin
Для численное решения жестких задач используются вычислительные алгоритмы, которые имеют повышенный запас устойчивости. Необходимо ориентироваться на использование \( A \)-устойчивых или \( A(\alpha) \)-устойчивых методов.
Метод называется \( A \)-устойчивым, если при решении задачи Коши для системы (3) область его устойчивости содержит угол $$ \begin
Задача Коши и Уравнение Эйлера
Как известно, задача Коши для линейного неоднородного уравнения состоит в следующем: найти решение этого уравнения, удовлетворяющее начальным условиям (данным Коши)
Пример 11. Найти частное решение уравнения
удовлетворяющее начальным условиям
Решение. Находим частное решение уравнения
Для решения поставленной начальной задачи Коши требуется определить значения постоянных и так, чтобы решение (24) удовлетворяло начальным условиям (23). Используя условие , получаем . Дифференцируя (24), найдем
откуда, в силу условия , будем иметь . Для отыскания получили систему
решая которую находим . Подставляя найденные значения произвольных постоянных в общее решение (24), получаем решение исходной задачи:
Пример 12. Найти частное решение уравнения
Решение. Общее решение данного уравнения
При величина и при любых и , не равных одновременно нулю, первое слагаемое правой части (26) будет функцией, неограниченной при , а второе слагаемое — функцией, ограниченной при всех значениях . Следовательно, только при имеем ограниченное при решение уравнения (25), именно
Более того, решение (27) уравнения (25) ограниченно при всех :
Пример 13. Найти частное решение уравнения
удовлетворяющее условию при .
Решение. Общее решение данного уравнения
При любых значениях постоянных и , не равных одновременно нулю, решение (29) является неограниченной функцией при . При решением уравнения (28) будет функция для которой, очевидно, выполняется условие . Таким образом, функция будет искомым частным решением.
Уравнения Эйлера
Дифференциальные линейные уравнения вида
где все постоянные, называются уравнениями Эйлера . Эти уравнения заменой независимого переменного преобразуются в линейные однородные уравнения с постоянными коэффициентами:
Замечание 1. Уравнение вида
также называются уравнениями Эйлера и сводятся к линейным однородным уравнениям с постоянными коэффициентами заменой переменных .
Замечание 2. Частные решения уравнения (30) можно сразу искать в виде , при этом для к мы получаем уравнение, которое совпадает с характеристическим уравнением для уравнения (31).
Пример 1. Найти общее решение уравнения Эйлера
Решение. Первый способ. Делаем в уравнении подстановку , тогда
Корни характеристического уравнения , и общее решение уравнения будет
Но так как , то или .
Второй способ. Будем искать решение данного уравнения в виде , где — неизвестное число. Находим .
Подставляя в уравнение, получаем
Но так как , то . Корни этого уравнения . Им соответствует фундаментальная система решений , и общее решение по-прежнему будет
Неоднородные уравнения Эйлера вида
где — многочлен степени , можно также решать методом подбора по аналогии с решением неоднородного линейного дифференциального уравнения с постоянными коэффициентами и с правой частью вида .
Пример 2. Решить уравнение Эйлера
Решение. Характеристическое уравнение , или имеет корни, Поэтому общее решение соответствующего однородного уравнения будет
http://slemeshevsky.github.io/num-mmf/ode/html/._ode-FlatUI001.html
http://mathhelpplanet.com/static.php?p=zadacha-koshi-i-uravnenie-eilera