Координатный способ задания движения точки
Рассматривается движение точки М в неподвижной системе отсчёта OXYZ (рис. 2.1). Единичные векторы (орты) i, j, k показывают положительные направления отсчёта координат X, Y, Z. Движущаяся точка описывает в пространстве некоторую линию, которую называют траекторией движения точки. По виду траектории все движения точки делятся на прямолинейные и криволинейные. Положение точки М в неподвижной системе отсчёта (НСО) определяется тремя координатами X, Y, Z. При движении точки М её координаты изменяются с течением времени. Следовательно, коорди 
наты X, Y, Z движущейся точки М являются функциями времени t.
Систему трёх уравнений X = f1(t); Y = f2(t); Z = f3(t) называют уравнениями движения точки в пространстве в декартовых координатах.
Пример: X = 10·t 2 + 1; Y = 7·t 3 + t 2 + 1; Z = 10·sin(p·t). Действительно, имея эти уравнения, можно для любого момента времени найти значения соответствующих координат X, Y, Z и по ним определить положение точки в пространстве в этот момент времени.
Движение точки М на плоскости (рис. 2.2) определяется двумя уравнениями: X = f1(t); Y = f2(t). Эти выражения называют уравнениями движения точки на плоскости в декартовой системе отсчёта.
Пример. Заданы уравнения движения точки в плоскости OXY. X = 3·t 2 + t 2 + t; Y = 7·cos(p·t).
Уравнения движения, определяющие координаты точки в любой момент времени, рассматривают как параметрические уравнения траектории точки. При исключении параметра t из уравнений движения получают уравнение траектории точки в координатной форме (Y = f(t)).
Пример. Заданы уравнения: X = 4·t (см); Y = 16·t 2 – 1 (см) движения точки в плоскости OXY. Определить вид траектории движения точки, построить её график и найти положение точки на траектории движения в момент времени t1 = 0,5 с.
Решение. Из уравнения X = 4·t находим t = X/4. Значение времени t подставляем в уравнение Y = 16·t 2 – 1. Получаем
Y = 16·(X/4) 2 – 1 = X 2 – 1.
Выражение Y = X 2 – 1 есть уравнение параболы (y= a·x 2 +b·x+c) с вершиной в точке с координатами (0, – 1). В момент времени t1 = 0,5 с определяем координаты:
Y(t1) = 16·(t1) 2 – 1 = 16·(0,5) 2 – 1 = 3 см >0.
Показываем положение точки на траектории её движения (рис. 2.3).
Пример. Дано: X = 3·sin(p·t), см (1); Y = 3·cos(p·t), см (2); t1 = 0,25 c. Определить вид траектории движения точки и её положение на траектории движения в момент времени t1.
Решение. Уравнения движения точки представим в следующем виде: (X) 2 = (3·sin(p·t)) 2 (1 I ); (Y) 2 = (3·cos(p·t)) 2 (2 I ). Для решения используем тригонометрическую формулу sin 2 (α) + cos 2 (α) = 1.
Складывая левые и правые части уравнений (1 I ) и (2 I ), получим (X) 2 + (Y) 2 = 3 2 ·(sin 2 (p·t) + cos 2 (p·t)) = 3 2 ·1 или (X) 2 + (Y) 2 = 3 2 . Известно, что уравнение (X) 2 + (Y) 2 = R 2 есть уравнение окружности радиусом R с центром в начале координат. Таким образом, точка 
движется по окружности радиусом R = 3 см (рис. 2.4).
Определяем положение точки на траектории движения в момент времени t1.
X(t1) = 3·sin(p·t1) = 3·sin(p·0,25) = 3·0,707 = 2,121 см > 0.
Y(t1) = 3·cos(p·t1) = 3·cos(p·0,25) = 3·0,707 = 2,121 см > 0.
Показываем точку на траектории её движения (см. рис. 2.4).
ВНИМАНИЕ! Если точка не попадает на траекторию её движения, то:
1) неверно определен вид траектории движения;
2) неверно рассчитаны значения координат X(t1), Y(t1).
Прямолинейное движение точки М определяется одним уравнением движения X = f(t).
Пример. Дано: X = 10·t 2 + sin(2·p·t) + 3, см (рис. 2.5).
Определить положение точки на траектории движения в начальный момент времени t0 = 0 и в момент времени t1 = 1 c.
Решение.
X(t0) = 10·(t0) 2 + sin(2·p·t0) + 3 = 10·0 2 + sin(2·p·0) + 3 = 3 см > 0.
X(t1) = 10·(t1) 2 + sin(2·p·t1) + 3 = 10·1 2 + sin(2·p·1) + 3 = 13 см > 0.
Значения координат X(t0), X(t1) наносим на рис. 2.5.
Заданы уравнения движения точки x 3t

Глава 7. Кинематика точки.
7.1. Траектория и положение точки в прямоугольной системе координат.
7.1.1. Заданы уравнения движения точки х = 1 + 2sin0,1t, у = 3t. Определить координату х точки в момент времени, когда ее координата у = 12 м. (Ответ 1,78)
7.1.2. Задано уравнение движения точки r = 3ti + 4 tj. Определить координату у точки в момент времени, когда r = 5 м. (Ответ 4)
7.1.3. Заданы уравнения движения точки х = 3t, у = t 2 . Определить расстояние точки от начала координат в момент времени t = 2 с. (Ответ 7,21)
7.1.4. Заданы уравнения движения точки х = cos t, у = 2 sin t. Определить расстояние от точки до начала координат в момент времени t = 2,5 с. (Ответ 1,44)
7.1.5. Положение кривошипа определяется углом (рад) φ = 0,2 t. Найти координату хв ползуна в момент времени t = 3 с, если длины звеньев ОА = АВ = 0,5м. (Ответ 0,825)
7.1.6. Заданы уравнения движения точки х = 2t, у = t. Определить время t когда расстояние от точки до начала координат достигнет 10 м. (Ответ 4,47)
7.1.7. Заданы уравнения движения точки х = 2 t, у = 1 — 2sin0,1t. Определить ближайший момент времени, когда точка пересечет ось Ох. (Ответ 5,24)
7.1.8. Заданы уравнения движения точки х = sin t, у = cos t. Определить ближайший момент времени, когда радиус-вектор точки, проведенный из начала координат, образует угол 45 o с осью Ох. (Ответ 0,785)
7.1.9. Для точки А заданы уравнения движения х = 2 cos t, у = 3 sin t. Определить угол между осью Ох и радиусом-вектором ОА точки в момент времени t = 1,5 с. (Ответ 1,52)
iSopromat.ru

Пример решения задачи по определению в заданный момент времени скорости, полного, касательного, нормального ускорений, радиуса кривизны и вида траектории точки по известным уравнениям её движения в координатной форме.
Задача
Определить вид траектории и в момент времени t=1 c найти скорость точки, полное, касательное, нормальное ускорения и радиус кривизны траектории в данной точке.
Решение
Координатный способ задания движения – это траектория движения точки в параметрической форме.
Исключим параметр t:
получили эллипс с полуосями 3 см и 2 см (рисунок 1.7).

В момент времени t=1 c координаты точки:

Движение начинается из точки A:
Учитывая графики изменения функций синуса и косинуса, можно утверждать, что точка M движется по эллипсу из точки A против хода часовой стрелки.
В момент времени t=1:

Направление вектора скорости определяется направляющими косинусами:
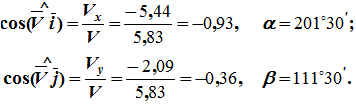
Таким образом, вектор скорости определен и по величине и по направлению (рисунок 1.8).
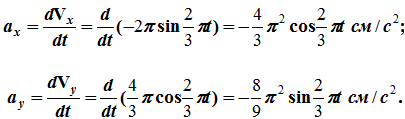



Направление вектора ускорения:
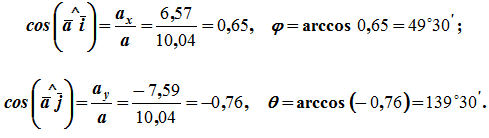
Результаты расчетов показаны на рисунке 1.8.
Касательное ускорение определяется по формуле (1.11):

Нормальное ускорение можно определить либо из формулы (1.5), либо из формулы (1.12). По формуле (1.12) получим:

Результат может быть проверен (см. выше расчет):

Радиус кривизны траектории в точке M:
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах

Решение задач, контрольных и РГР
Стоимость мы сообщим в течение 5 минут
на указанный вами адрес электронной почты.
Если стоимость устроит вы сможете оформить заказ.
НАБОР СТУДЕНТА ДЛЯ УЧЁБЫ
— Рамки A4 для учебных работ
— Миллиметровки разного цвета
— Шрифты чертежные ГОСТ
— Листы в клетку и в линейку
http://www.zachet.ca/termech/kepe/kepe_k1.php
http://isopromat.ru/teormeh/primery-reshenia-zadach/najti-skorost-tocki-polnoe-kasatelnoe-normalnoe-uskorenia-i-radius-krivizny-traektorii