Закон движения материальной точки дан уравнениями
Кинематические характеристики
Ра́диус-ве́ктор (обычно обозначается  или просто
или просто  ) — вектор, задающий положения точки в пространстве (например, гильбертовом или векторном) относительно некоторой заранее фиксированной точки , называемой началом координат.
) — вектор, задающий положения точки в пространстве (например, гильбертовом или векторном) относительно некоторой заранее фиксированной точки , называемой началом координат.
Перемеще́ние (в кинематике) — изменение местоположения физического тела в пространстве относительно выбранной системы отсчёта
Вектор скорости
Ско́рость (часто обозначается  , от англ. velocity или фр. vitesse) — векторная величина, характеризующаябыстроту перемещения и направление движения материальной точки в пространстве относительновыбранной системы отсчёта
, от англ. velocity или фр. vitesse) — векторная величина, характеризующаябыстроту перемещения и направление движения материальной точки в пространстве относительновыбранной системы отсчёта
Ускоре́ние (обычно обозначается латинскими буквами a (от лат. acceleratio) или w) — физическая величина, определяющая быстроту изменения скорости тела, то есть первая производная от скорости по времени.
2.. Кинематические уравнения прямолинейного равномерного движения
s = v∙t x = x0  v∙t, где x0 — начальная координата тела на оси ОХ
v∙t, где x0 — начальная координата тела на оси ОХ
Кинематические уравнения равноускоренного движения
 Движение тела по окружности- Т=1/vV=2Пrv aц=V^2/R
Движение тела по окружности- Т=1/vV=2Пrv aц=V^2/R
Закон движения материальной точки дан уравнениями
X=bt y=ct-kt^2/2
Первый закон Ньютона —Существуют такие системы отсчёта, называемые инерциальными, относительно которых материальные точки, когда на них не действуют никакие силы (или действуют силы взаимно уравновешенные), находятся в состоянии покоя или равномерного прямолинейного движения.
Инерциа́льная систе́ма отсчёта (ИСО) — система отсчёта, в которой все свободные тела движутся прямолинейно и равномерно или покоятся
Ма́сса (от др.-греч. μάζα, кусок теста) — скалярная физическая величина,
Си́ла — векторная физическая величина, являющаяся мерой интенсивности воздействия на данное тело других тел, а также полей
Втоой закон Ньютона – F=ma
Импульс p=mv
Третий закон Ньютона-Материальные точки взаимодействуют друг с другом силами, имеющими одинаковую природу, направленными вдоль прямой, соединяющей эти точки, равными по модулю и противоположными по направлению: F=-F
Системой материальных точек называется физическая система, состоящая из нескольких (взаимодействующих между собой или не взаимодействующих) тел, каждое из которых при решении данной задачи можно считать материальной точкой (т. е. размерами которого, внутренней структурой и вращательными движениями можно пренебречь (возможно, они учитываются с помощью других параметров)
Основное уравнение динамики поступательного движения 
4.Первый закон кеплера-  , где
, где  — расстояние от центра эллипса до его фокуса (половина межфокусного расстояния),
— расстояние от центра эллипса до его фокуса (половина межфокусного расстояния),  — большая полуось. Величина
— большая полуось. Величина  называется эксцентриситетом эллипса. При
называется эксцентриситетом эллипса. При  , и, следовательно,
, и, следовательно,  эллипс превращается в окружность.
эллипс превращается в окружность.
Второй закон Кеплера-Каждая планета движется в плоскости, проходящей через центр Солнца, причём за равные промежутки времени радиус-вектор, соединяющий Солнце и планету, описывает равные площади.
Третий закон кеплера- Квадраты периодов обращения планет вокруг Солнца относятся, как кубы больших полуосей орбит планет. Справедливо не только для планет, но и для их спутников.
 , где
, где  и
и  — периоды обращения двух планет вокруг Солнца, а
— периоды обращения двух планет вокруг Солнца, а  и
и  — длины больших полуосей их орбит
— длины больших полуосей их орбит
Закон всемирного тяготения- F = GMm/D 2
где G — гравитационная константа, определяемая экспериментально. В единицах СИ ее значение составляет приблизительно 6,67 × 10 –11 .
· Гравитационная масса показывает, с какой силой тело взаимодействует с внешними гравитационнымиполями (пассивная гравитационная масса) и какое гравитационное поле создаёт само это тело (активнаягравитационная масса) — эта масса фигурирует в законе всемирного тяготения.
Сила тяжести- F=mg
Вес — сила воздействия тела на опору (или подвес или другой вид крепления), препятствующую падению, возникающая в поле сил тяжести
Невесо́мость — состояние, при котором отсутствует взаимодействие с опорой ( бесконечное падение с ускорением g=9,8 м/c² )
Космическая скорость (первая v1, вторая v2, третья v3 и четвёртая v4) — это минимальная скорость, при которой какое-либо тело в свободном движении с поверхности небесного тела сможет:
· v1 (круговая скорость) — стать спутником небесного тела (то есть вращаться по круговой орбите вокруг НТ на нулевой или пренебрежимо малой высоте относительно поверхности);
· v2 (параболическая скорость, скорость убегания) — преодолеть гравитационное притяжение небесного тела и уйти на бесконечность;
· v3 — покинуть звёздную систему, преодолев притяжение звезды;
Cила трения.  где f — коэффициент трения скольжения, который зависит от свойств соприкасающихся поверхностей.
где f — коэффициент трения скольжения, который зависит от свойств соприкасающихся поверхностей.
5. Неинерциа́льная систе́ма отсчёта — система отсчёта, в которой не выполняется первый закон Ньютона — «закон инерции», говорящий о том, что каждое тело, в отсутствие действующих на него сил, покоится либо движется по прямой и с постоянной скоростью
Си́ла ине́рции (также инерционная сила) — многозначное понятие, применяемое в механике по отношению к трём различным физическим величинам.
6. Механическая работа — это физическая величина, являющаяся скалярной количественной мерой действия силы или сил на тело или систему, зависящая от численной величины, направления силы (сил) и от перемещения точки (точек), тела или системы
A=FS
Мо́щность — физическая величина, равная в общем случае скорости изменения, преобразования, передачи или потребления энергии системы. В более узком смысле мощность равна отношению работы, выполняемой за некоторый промежуток времени, к этому промежутку времени P=Fv ВТ
Консервативными силами называются силы, работа которых не зависит от пути перехода тела или системы из начального положения в конечное
Неконсервативными(диссипативными) силами называются силы, работа которых зависит от пути перехода тела или системы из начального положения в конечное
Закон сохранения энергии 

7. Закон сохранения импульса 
Закон сохранения проекции импульса системы материальных точек. Pсист=p1+p2+..+pn
8. абсолютно упругий удар двух тел 
абсолютно неупругий удар двух тел 
9. Абсолю́тно упру́гое те́ло в механике — частный случай деформируемого тела, которое после прекращения действия причины, вызвавшей его деформацию, полностью восстанавливает исходные размеры и форму, т. е. в нём отсутствует остаточная деформация
Закон Гука Fупр=-kxЗдесь  — сила, которой растягивают (сжимают) стержень, , а
— сила, которой растягивают (сжимают) стержень, , а  — коэффициент упругости (или жёсткости)
— коэффициент упругости (или жёсткости)
10. Вращательное движение-это когда все точки тела движатся по окружности!
Момент силы  где
где  — сила, действующая на частицу, а — радиус-вектор частицы
— сила, действующая на частицу, а — радиус-вектор частицы
Момент импульса-  где — радиус-вектор частицы относительно выбранного неподвижного в данной системе отсчёта начала отсчёта,
где — радиус-вектор частицы относительно выбранного неподвижного в данной системе отсчёта начала отсчёта,  — импульс частицы.
— импульс частицы.
Основной закон вращательного движения для материальной точкиПроизведение момента инерции на угловое ускорение равно результирующему моменту сил, действующих на материальную точку: »
M = I·e.
11. Момент импульса системы материальных точек 
Момент инерции твердого тела относительно неподвижной оси- называется скалярная величина, равная сумме произведений массы каждой точки тела на квадрат расстояния от этой точки до оси
12. Закон сохранения момента импульса относительно неподвижной оси L=IW
Вычисление момента инерции симметричных тел 
Теорема Штейнера- I=Ic+md^2
Теорема Кенига- Eкин=mv^2/2+IW^2/2
Кинетическая энергия вращающегося тела Wкин=IW^2/2
13. При́нцип относи́тельности (принцип относительности Эйнштейна) — фундаментальный физический принцип, один из принципов симметрии, согласно которому все физические процессы в инерциальных системах отсчётапротекают одинаково, независимо от того, неподвижна ли система или она находится в состоянии равномерного ипрямолинейного движения
Специальная теория относительности (СТО; также частная теория относительности) — теория, описывающая движение, законы механики и пространственно-временные отношения при произвольных скоростях движения, меньших скорости света в вакууме, в том числе близких к скорости света
Постулат 1 (принцип относительности Эйнштейна). Любое физическое явление протекает одинаково во всех инерциальных системах отсчёта. Это означает, что форма зависимости физических законов от пространственно-временных координат должна быть одинаковой во всех ИСО, то есть законы инвариантны относительно переходов между ИСО. Принцип относительности устанавливает равноправие всех ИСО.
Постулат 2 (принцип постоянства скорости света). Скорость света в «покоящейся» системе отсчёта не зависит от скорости источника.
Преобразования Лоренца координат и скоростей- 
Следствие теории относительности— скорость света в вакууме (с=3·10 8 м/с) – предельная скорость движения материи; -изменение системы отсчета приводит к изменениям координат, причем все координаты, включая время (!), относительны;- пространственные интервалы относительны;-временные интервалы относительны
Релятивистская масса 
Релятивистский импульс 
ЭНЕРГИЯ ПОКОЯ тела, энергия E0 свободного тела в системе отсчета, в которой тело покоится: E0=m0c2,где m0 — масса покоя, c — скорость света в вакууме
Релятивистская кинетическая энергия- 
Уравнение движения материальной точки
Движение материальной точки в пространстве – это изменение ее положения относительно других тел с течением времени.
Имеет смысл говорить только о движении в некоторой системе отсчета.
Система отсчета. Системы координат
Точки, располагаемые в пустом пространстве, не различаются. Поэтому о точке рассуждают при условии нахождения в ней материальной точки. Определить ее положение можно при помощи измерений в системе координат, где и проводится нахождение пространственных координат. Если рассматривать в виде примера поверхность Земли, то следует учитывать широту и долготу располагаемой точки.
В теории используется декартова прямоугольная система координат, где определение точки возможно при наличии радиус-вектора r и трех проекций x , y , z – ее координат. Могут быть применены другие:
- сферическая система с положением точек и ее радиус-вектором, определенных координатами r , υ , φ ;
- цилиндрическая система с координатами p , z , α ;
- на полярной плоскости с параметрами r , φ .
В теории зачастую не принимают во внимание реальную систему отсчета, а сохраняют только ту, которая представляет собой ее математическую модель, применяемую во время практических измерений.
Кинематическое уравнение движения материальной точки
Любая система отсчета или координат предполагает определение координат материальной точки в любой момент времени.
При условии положения и определения материальной точки в данной системе отсчета считается, что ее движение задано или описано.
Это возможно при использовании кинематического уравнения движения:
Аналитически положение точки определяется совокупностью трех независимых между собой чисел. Иначе говоря, свободная точка имеет три степени свободы движения.
Ее перемещение по уравнению ( 1 ) определено, если имеется указанное положение в любой момент времени t . Для этого следует задавать декартовы координаты точки в качестве однозначных и непрерывных функций времени:
x ( t ) = x , y ( t ) = y , z ( t ) = z ( 2 ) .
Прямоугольные декартовы координаты x , y , z — это проекции радиус-вектора r ¯ , проведенного из начала координат. Очевидно, что длину и направление r ¯ можно найти из соотношений, где a , β , γ являются образованными радиус-вектором углами с координатными осями.
Равенства ( 2 ) считают кинематическими уравнениями движения материальной точки в декартовых координатах.
Они могут быть записаны в другой системе координат, которая связана с декартовой взаимно однозначным преобразованием. Если движение точки происходит в плоскости О х у , тогда применимы полярные координаты r , φ , относящиеся к декартовым преобразованиям. Данный случай подразумевает использование уравнения движения точки следующего вида:
r = r ( t ) , φ = φ ( t ) ( 3 ) .
Кинематическое уравнение движения точки в криволинейных координатах q 1 , q 2 , q 3 , связанных с декартовыми преобразованиями вида x = x ( q 1 , q 2 , q 3 ) , y = y ( q 1 , q 2 , q 3 ) , z = z ( q 1 , q 2 , q 3 ) ( 4 ) , записывается как
q 1 = q 1 ( t ) , q 2 = q 2 ( t ) , q 3 = q 3 ( t ) ( 5 ) .
Кривая радиус-вектора, описываемая концом вектора r при движении точки, совпадает с ее траекторией. Параметрическое уравнение траектории с t представлено кинематическими уравнениями ( 2 ) , ( 5 ) . Чтобы получить координатное уравнение траектории следует исключить время из кинематических уравнений.
Определение движения точки возможно с помощью задания траектории и мгновенного положения точки на ней. Ее положение на кривой определяется с помощью указания только одной величины: расстояния вдоль кривой от некоторой начальной точки с положительным направлением:
Это и есть уравнение движения точки по траектории. Способ его задания относят к естественному или траекторному.
Понятия координатного и естественного способа задания движения точки физически эквивалентны. С математической стороны это рассматривают как возможность применения разных методов, исходя из случая математической задачи.
Задание такого закона возможно аналитическим, графическим путем или с использованием таблицы, последние два из которых зачастую рассматривают в виде графиков и расписаний движений поездов.
Дано уравнение движения материальной точки x = 0 , 4 t 2 . Произвести запись формулы зависимости υ x ( t ) , построить график зависимости скорости от времени. На графике отметить площадь, численно равную пути, пройденному точкой за 4 секунды, произвести вычисление.
Дано: x = 0 , 4 t 2 , t = 4 c
Найти: υ x ( t ) , S — ?
Решение
При решении необходимо учитывать зависимость скорости от времени:
υ x = υ 0 x + a x t .
Зависимость координаты от времени и сравнение уравнения с заданным принимает вид:
x = x 0 + υ 0 x t + a x t 2 2 , x = 0 , 4 t 2 .
Очевидно, что x 0 = 0 , υ 0 x = 0 , a x = 0 , 8 м / с 2 .
После подстановки данных в уравнение:
Определим точки, изобразим график:
υ x = 0 , t = 0 , υ x = 4 , t = 5

Путь, по которому двигалось тело, равняется площади фигуры, ограниченной графиком, и находится с помощью формулы:
Примеры решения задач. Движение точки задано уравнениями (х, у — в метрах, t — в секундах).
Задача 2.1.
Движение точки задано уравнениями (х, у — в метрах, t — в секундах).
 .
.
Определить траекторию, скорость и ускорение точки.
Решение.
 |
| Рис. 2.9. К задаче 2.1 |
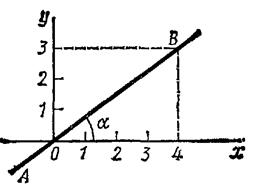
Для определения траектории исключаем из уравнений движения время t. Умножая обе части первого уравнения на 3, а обе части второго — на 4 и почленно вычитая из первого равенства второе, получим:  или
или  .
.
Следовательно, траектория — прямая линия, наклоненная к оси Ох под углом α, где  (рис. 2.9).
(рис. 2.9).
Определяем скорость точки. По формулам (2.1) получаем:
 ;
;
 .
.
Теперь находим ускорение точки. Формулы (2.1) дают:

Направлены векторы  и
и  вдоль траектории, т. е. вдоль прямой АВ. Проекции ускорения на координатные оси все время отрицательны, следовательно, ускорение имеет постоянное направление от В к А. Проекции скорости при 0 1 с) обе проекции скорости отрицательны и, следовательно, скорость направлена от В к А, т. е. так же, как и ускорение.
вдоль траектории, т. е. вдоль прямой АВ. Проекции ускорения на координатные оси все время отрицательны, следовательно, ускорение имеет постоянное направление от В к А. Проекции скорости при 0 1 с) обе проекции скорости отрицательны и, следовательно, скорость направлена от В к А, т. е. так же, как и ускорение.
Заметим, наконец, что при 
 и
и  ; при
; при 
 (точка В); при
(точка В); при 
 ; при
; при  значения
значения  и
и  растут по модулю, оставаясь отрицательными.
растут по модулю, оставаясь отрицательными.
Итак, заданные в условиях задачи уравнения движения рассказывают нам всю историю движения точки. Движение начинается из точки О с начальной скоростью  и происходит вдоль прямой АВ, наклоненной к оси Ох под углом α, для которого . На участке OB точка движется замедленно (модуль ее скорости убывает) и через одну секунду приходит в положение В (4, 3), где скорость ее обращается в нуль. Отсюда начинается ускоренное движение в обратную сторону. В момент точка вновь оказывается в начале координат и дальше продолжает свое движение вдоль ОА, Ускорение точки все время равно 10 м/с 2 .
и происходит вдоль прямой АВ, наклоненной к оси Ох под углом α, для которого . На участке OB точка движется замедленно (модуль ее скорости убывает) и через одну секунду приходит в положение В (4, 3), где скорость ее обращается в нуль. Отсюда начинается ускоренное движение в обратную сторону. В момент точка вновь оказывается в начале координат и дальше продолжает свое движение вдоль ОА, Ускорение точки все время равно 10 м/с 2 .
Задача 2.2.
Движение точки задано уравнениями:

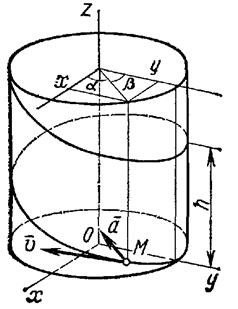
где  , ω и u — постоянные величины. Определить траекторию, скорость и ускорение точки.
, ω и u — постоянные величины. Определить траекторию, скорость и ускорение точки.
Решение.
 |
| Рис. 2.10. К задаче 2.2 |
Возводя первые два уравнения почленно в квадрат и складывая, получаем
 .
.
Следовательно, траектория лежит на круглом цилиндре радиуса R, ось которого направлена вдоль оси Oz (рис. 2.10). Определяя из последнего уравнения t и подставляя в первое, находим
 .
.
Таким образом, траекторией точки будет линия пересечения синусоидальной поверхности, образующие которой параллельны оси Оу (синусоидальный гофр) с цилиндрической поверхностью радиуса R. Эта кривая называется винтовой линией. Из уравнений движения видно, что один виток винтовой линий точка проходит за время  , определяемое из равенства
, определяемое из равенства  . При этом вдоль оси z точка за это время перемещается на величину
. При этом вдоль оси z точка за это время перемещается на величину  , называемую шагом винтовой линии.
, называемую шагом винтовой линии.
Найдем скорость и ускорение точки. Дифференцируя уравнения движения по времени, получаем:

 .
.
Стоящие под знаком радикала величины постоянны. Следовательно, движение происходит с постоянной по модулю скоростью, направленной по касательной к траектории. Теперь по формулам (2.1) вычисляем проекции ускорения;



 .
.
Итак, движение происходит с постоянным по модулю ускорением, Для определения направления ускорения имеем формулы:
 ,
,
 ’
’
 .
.
 ,
,
где α и β —углы, образуемые с осями Ох и Оу радиусом R, проведенным от оси цилиндра к движущейся точке. Так как косинусы углов α1 и β1 отличаются от косинусов α и β только знаками, то отсюда заключаем, что ускорение точки все время направлено по радиусу цилиндра к его оси.
Заметим, что хотя в данном случае движение и происходит со скоростью, постоянной по модулю, ускорение точки не равно нулю, так как направление скорости изменяется.
Задача 2.3.
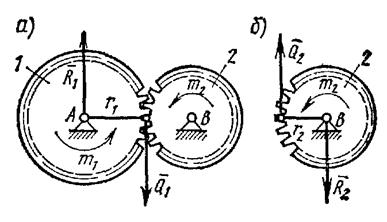
На шестерню 1 радиуса r1 действует пара сил с моментом m1 (рис. 46, а). Определить момент m2 пары, которую надо приложить к шестерне 2 радиуса r2, чтобы сохранить равновесие.
Решение.
 |
| Рис. 2.11. К задаче 2.3 |
Рассмотрим сначала условия равновесия шестерни 1. На нее действует пара с моментом m1, которая может быть уравновешена только действием другой пары, в данном случае пары  . Здесь
. Здесь  — перпендикулярная радиусу составляющая силы давления на зуб со стороны шестерни 2, a
— перпендикулярная радиусу составляющая силы давления на зуб со стороны шестерни 2, a  — тоже перпендикулярная радиусу составляющая реакции оси А (сила давления на зуб и реакция оси А имеют еще составляющие вдоль радиуса, которые взаимно уравновешиваются и в условие равновесия не войдут). При этом, согласно условию равновесия (17),
— тоже перпендикулярная радиусу составляющая реакции оси А (сила давления на зуб и реакция оси А имеют еще составляющие вдоль радиуса, которые взаимно уравновешиваются и в условие равновесия не войдут). При этом, согласно условию равновесия (17),  и
и  .
.
Теперь рассмотрим условия равновесия шестерни 2 (рис. 46, б). По закону равенства действия и противодействия на нее со стороны шестерни 1 будет действовать сила  , которая с перпендикулярной радиусу составляющей реакции оси В образует пару
, которая с перпендикулярной радиусу составляющей реакции оси В образует пару  ,
,  с моментом, равным -Q2r2. Эта пара и должна уравновеситься приложенной к шестерне 2 парой с моментом m2; следовательно, по условию равновесия,
с моментом, равным -Q2r2. Эта пара и должна уравновеситься приложенной к шестерне 2 парой с моментом m2; следовательно, по условию равновесия,  . Отсюда, так как Q2=Q1 находим m2=m1/r2r1.
. Отсюда, так как Q2=Q1 находим m2=m1/r2r1.
Естественно, что пары с моментами m1 и m2 не удовлетворяют условию равновесия , так как они приложены к разным телам.
Полученная в процессе решения задачи величина Q1 (или Q2) называется окружным усилием, действующим на шестерню. Как видим, окружное усилие равно моменту вращающей пары, деленному на радиус шестерни: Q1=m1/r1 =m2/r2.
Задача 2.4.
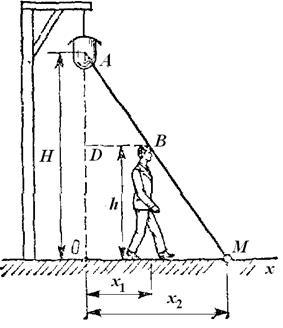
Человек ростом h удаляется от фонаря, висящего на высоте H, двигаясь прямолинейно со скоростью  . С какой скоростью движется конец тени человека?
. С какой скоростью движется конец тени человека?
Решение.
 |
| Рис. 2.12. К задаче 2.4 |
Для решения задачи найдем сначала закон, по которому движется конец тени. Выбираем начало отсчета в точке О, находящейся на одной вертикали с фонарем, и направляем вдоль прямой, по которой движется конец тени, координатную ось Ох (рис. 2.12). Изображаем человека в произвольном положении на расстоянии x1 от точки О. Тогда конец его тени будет находиться от начала О на расстоянии х2.
Из подобия треугольников ОАМ и DAB находим:
 .
.
Это уравнение выражает закон движения конца тени М, если закон движения человека, т.е.  , известен.
, известен.
Взяв производную по времени от обеих частей равенства и замечая, что по формуле (2.1)  , где
, где  — искомая скорость, получим
— искомая скорость, получим
 .
.
Если человек движется с постоянной скоростью (  ), то скорость конца тени М будет тоже постоянна, но в
), то скорость конца тени М будет тоже постоянна, но в  раз больше, чем скорость человека.
раз больше, чем скорость человека.
Обращаем внимание на то, что при составлении уравнений движения надо изображать движущееся тело или механизм в произвольном положении. Только тогда мы поучим уравнения, определяющие положение движущейся точки (или тела) в любой момент времени.
Задача 2.5.
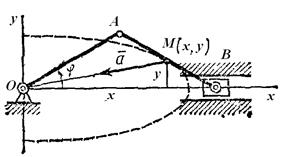
Определить траекторию, скорость и ускорение середины М шатуна кривошипно-ползунного механизма (рис. 2.13), если OA=AB=2b, а угол  при вращении кривошипа растет пропорционально времени:
при вращении кривошипа растет пропорционально времени:  .
.
 |
| Рис. 2.13. К задаче 2.5. |
Начинаем с определения уравнений движения точки М. Проводя оси и обозначая координаты точки М в произвольном положении через х и у находим
 .
.
Заменяя его значением, получаем уравнения движения точки М:
 .
.
Для определения траектории точки М представим уравнения движения в виде
 .
.
Возводя эти равенства почленно в квадрат и складывая, получим
 .
.
Итак, траектория точки М — эллипс с полуосями 3b и b.
Теперь по формуле (2.1) находим скорость точки М:

 .
.
Скорость оказывается величиной переменной, меняющейся с течением времени в пределах от  до
до  .
.
Далее по формулам (2.1) определяем проекции ускорения точки М;
 ;
;
 ,
,
где  — длина радиуса-вектора, проведанного из центра О до точки М. Следовательно, модуль ускорения точки меняется пропорционально ее расстояние от центра эллипса.
— длина радиуса-вектора, проведанного из центра О до точки М. Следовательно, модуль ускорения точки меняется пропорционально ее расстояние от центра эллипса.
Определелим направление ускорения

Отсюда находим, что ускорение точки М все время направлено вдоль МО к центру эллипса.
Задача 2.6.
Вал, делающий n=90 об/мин, после выключения двигателя начинает вращаться равнозамедленно и останавливается через t1=40 с. Определить, сколько оборотов сделал вал за это время.
Решение.
Так как вал вращается равнозамедленно, то для него, считая  , будет
, будет
 . (2.2)
. (2.2)
Начальной угловой скоростью при замедленном вращении является та, которую вал имел до выключения двигателя. Следовательно,
 .
.
В момент остановки при t=t1 угловая скорость вала ω1=0. Подставляя эти значения во второе из уравнений (2.2), получаем:
 и
и  .
.
Если обозначить число сделанных валом за время t1 оборотов через N (не смешивать с n; n — угловая скорость), то угол поворота за то же время будет равен  . Подставляя найденные значения ε и
. Подставляя найденные значения ε и  в первое из уравнений (а), получим
в первое из уравнений (а), получим
 ,
,
 .
.
Задача 2.7.
Маховик радиусом R=0,6 м вращается равномерно, делая n=90 об/мин. Определить скорость и ускорение точки, лежащей на ободе маховика.
Решение.
Скорость точки обода  , где угловая скорость
, где угловая скорость  должна быть выражена в радианах в секунду. Тогда
должна быть выражена в радианах в секунду. Тогда  и
и  .
.
Далее, так как  , то ε=0, и, следовательно,
, то ε=0, и, следовательно,
 .
.
Ускорение точки направлено в данном случае к оси вращения.
Задача 2.8.
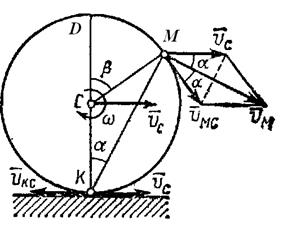
Найти скорость точки М обода колеса, катящегося по прямолинейному рельсу без скольжения (рис. 2.14), если скорость центра С колеса равна  , а угол DKM=α.
, а угол DKM=α.
 |
| Рис. 2.14. К задаче 2.8. |
Решение
Приняв точку С, скорость которой известна, за полюс, найдем, что  , где
, где  по модулю
по модулю  (
(  — радиус колеса). Значение угловой скорости со найдем из условия того, что точка
— радиус колеса). Значение угловой скорости со найдем из условия того, что точка  колеса не скользит по рельсу и, следовательно, в данный момент времени
колеса не скользит по рельсу и, следовательно, в данный момент времени  . С другой стороны, так же как и для точки М,
. С другой стороны, так же как и для точки М,  где
где  . Так как для точки К скорости
. Так как для точки К скорости  и
и  направлены вдоль одной прямой, то при
направлены вдоль одной прямой, то при  , откуда
, откуда  . В результате находим, что
. В результате находим, что  .
.
Параллелограмм, построенный на векторах  и
и  , будет при этом ромбом. Угол между и равен β, так как стороны, образующие этот угол и угол β, взаимно перпендикулярны. В свою очередь угол β=2α, как центральный угол, опирающийся на ту же дугу, что и вписанный угол α. Тогда по свойствам ромба углы между и
, будет при этом ромбом. Угол между и равен β, так как стороны, образующие этот угол и угол β, взаимно перпендикулярны. В свою очередь угол β=2α, как центральный угол, опирающийся на ту же дугу, что и вписанный угол α. Тогда по свойствам ромба углы между и  и между и тоже равны α. Окончательно, так как диагонали ромба взаимно перпендикулярны, получим
и между и тоже равны α. Окончательно, так как диагонали ромба взаимно перпендикулярны, получим
 и
и  .
.
Задача 2.9.
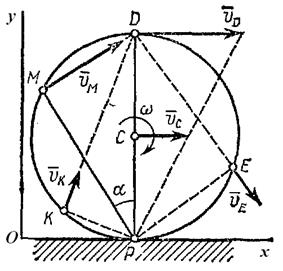
Определить скорость точки М обода катящегося колеса, рассмотренного в предыдущей задаче, с помощью мгновенного центра скоростей.
Решение.
 |
| Рис. 2.15. К задаче 2.9. |
Точка касания колеса Р (рис. 2.15) является мгновенным центром скоростей, поскольку  . Следовательно,
. Следовательно,  . Так как прямой угол PMD опирается на диаметр, то направление вектора скорости
. Так как прямой угол PMD опирается на диаметр, то направление вектора скорости  любой точки обода проходит через точку D. Составляя пропорцию
любой точки обода проходит через точку D. Составляя пропорцию  и замечая,
и замечая,
что  , a
, a  , находим
, находим  .
.
Чем точка М дальше от Р, тем ее скорость больше; наибольшую скорость  имеет верхний конец D вертикального диаметра. Угловая скорость колеса имеет значение
имеет верхний конец D вертикального диаметра. Угловая скорость колеса имеет значение

Аналогичная картина распределения скоростей имеет место при качении колеса или шестерни по любой цилиндрической поверхности.
Задача 2.10.
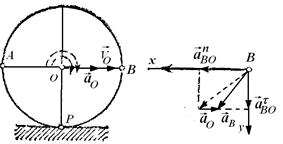
Центр О колеса, катящегося по прямолинейному рельсу (рис. 2.16), имеет в данный момент времени скорость  и ускорение
и ускорение  . Радиус колеса R=0,2 м. Определить ускорение точки В — конца перпендикулярного ОР диаметра АВ и ускорение точки Р, совпадающей с мгновенным центром скоростей.
. Радиус колеса R=0,2 м. Определить ускорение точки В — конца перпендикулярного ОР диаметра АВ и ускорение точки Р, совпадающей с мгновенным центром скоростей.
Решение.
 |
| Рис. 2.16. К задаче 2.10. |
1) Так как  и
и  известны, принимаем точку О за полюс.
известны, принимаем точку О за полюс.
2) Определение ω. Точка касания Р является мгновенным центром скоростей; следовательно, угловая скорость колеса
 .
.
3) Определение ε. Так как величина PO=R остается постоянной при любом положении колеса, то 
Знаки ω и ε совпадают, следовательно, вращение колеса ускоренное.
а) не следует думать, что если по условиям задачи , то  . Значение
. Значение  в задаче указано для данного момента времени; с течением же времени изменяется, так как
в задаче указано для данного момента времени; с течением же времени изменяется, так как  ;
;
б) в данном случае  , так как движение точки O является прямолинейным. В общем случае
, так как движение точки O является прямолинейным. В общем случае  .
.
4) Определение  и
и  . Так как за полюс взята точка O, то ускорение точки B определяется по фомуле:
. Так как за полюс взята точка O, то ускорение точки B определяется по фомуле:

Учитывая, что в нашем случае BO=R, находим:
 .
.
Показав на чертеже точку B отдельно, изображаем (без соблюдения масштаба) векторы, из которых слагается ускорение  , а именно: вектор
, а именно: вектор  (переносим из точки O), вектор
(переносим из точки O), вектор  (в сторону вращения, так как оно ускоренное) и вектор
(в сторону вращения, так как оно ускоренное) и вектор  (всегда от B к полюсу O).
(всегда от B к полюсу O).
5) Вычисление  . Проведя оси X и Y, находим, что
. Проведя оси X и Y, находим, что
 ,
,
 .
.
Аналогичным путем легко найти и ускорение точки P:  и направлено вдоль PO. Таким образом, ускорение точки P, скорость которой в данный момент времени равна нулю, нулю не равно.
и направлено вдоль PO. Таким образом, ускорение точки P, скорость которой в данный момент времени равна нулю, нулю не равно.
Задача 2.11.
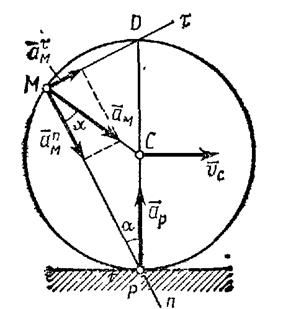
Колесо катится по прямолинейному рельсу так, что скорость  его центра С постоянна. Определить ускорение точки М обода колеса (рис. 2.17).
его центра С постоянна. Определить ускорение точки М обода колеса (рис. 2.17).
Решение.
 |
| Рис. 2.17. К задаче 2.11. |
Так как по условиям задачи  , то
, то  и точка С является мгновенным центром ускорений. Мгновенный центр скоростей находится в точке Р. Следовательно, для колеса
и точка С является мгновенным центром ускорений. Мгновенный центр скоростей находится в точке Р. Следовательно, для колеса

В результате ускорение точки М
 .
.
Таким образом, ускорение любой точки М обода (в том числе и точки Р) равно  и направлено к центру С колеса, так как угол
и направлено к центру С колеса, так как угол  . Заметим, что это ускорение для точки М не будет нормальным ускорением. В самом деле, скорость точки М направлена перпендикулярно РМ . Следовательно, касательная
. Заметим, что это ускорение для точки М не будет нормальным ускорением. В самом деле, скорость точки М направлена перпендикулярно РМ . Следовательно, касательная  к траектории точки М направлена вдоль линии MD, а главная нормаль
к траектории точки М направлена вдоль линии MD, а главная нормаль  — вдоль МР. Поэтому
— вдоль МР. Поэтому
 .
.
Зажача 2.12.
Плоский механизм состоит из стержней 1, 2, 3, 4 и ползуна С, соединенных друг с другом и с неподвижными опорами О1 и О2 шарнирами (рис.2.17 а). Точка D находится в середине стержня АВ. Длины стержней равны соответственно L1=0,4 м, L2 =1,2 м, L3=1,4 м, L4=0,6 м.
Дано:  = 6 с -1 , величина постоянная. Заданную угловую скорость считать направленной против часовой стрелки.
= 6 с -1 , величина постоянная. Заданную угловую скорость считать направленной против часовой стрелки.
Найти: скорости точек В и C; угловую скорость  ; ускорение точки В; угловое ускорение
; ускорение точки В; угловое ускорение 
| а) | 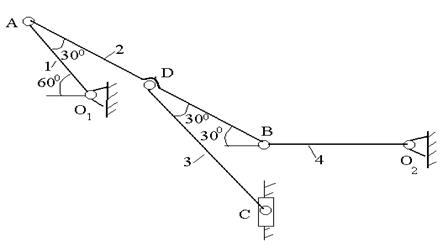 |
| б) | 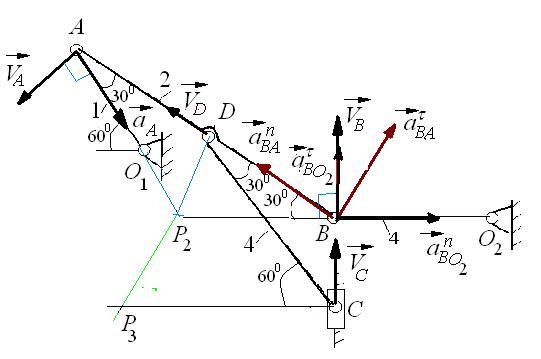 |
| Рис.2.17. К задаче 2.12. |
Решение (рис.2.12б)
1. Определим скорость точки А. Стержень OAвращается вокруг точко O1, поэтому скорость точки А определяется по формуле  = 1,6 м/с и направлена перпендикулярно отрезку O1А.
= 1,6 м/с и направлена перпендикулярно отрезку O1А.  = 1,6 м/с
= 1,6 м/с
2. Определим угловую скорость стержня АВ. Точка В вращается вокруг центра О2, поэтому ее скорость перпендикулярна отрезку O2B. Для нахождения мгновенного центра скоростей отрезка АВ в точках А и В восстановим перпендикуляры к векторам  и
и  . Точка пересечения этих перпендикуляров Р2 является мгновенным центром скоростей второго стержня. Угловая скорость вычисляется по формуле
. Точка пересечения этих перпендикуляров Р2 является мгновенным центром скоростей второго стержня. Угловая скорость вычисляется по формуле  . Расстояние
. Расстояние  определяется из равнобедренного треугольника
определяется из равнобедренного треугольника  , то есть
, то есть  м. Поэтому
м. Поэтому  2,3 с -1 .
2,3 с -1 .
3. Определим скорость точки В по формуле  = 1,6 м/с
= 1,6 м/с
по формуле  = 0,8 м/с
= 0,8 м/с
4. Определим скорость точки С. Так как точка С движется прямолинейно, то ее скорость направлена вдоль движения ползуна. Для нахождения мгновенного центра скоростей отрезка CD в точках C и D восстановим перпендикуляры к векторам  и
и  . Точка пересечения этих перпендикуляров Р3 является мгновенным центром скоростей третьего стержня. Угловая скорость вычисляется по формуле
. Точка пересечения этих перпендикуляров Р3 является мгновенным центром скоростей третьего стержня. Угловая скорость вычисляется по формуле  , а скорость точки С
, а скорость точки С  . Так как треугольник
. Так как треугольник  равносторонний, то
равносторонний, то  = 0,8 м/с
= 0,8 м/с
5. Определим угловую скорость отрезка О2В. Известно, что центром скоростей этого стержня является точка О2В , а также скорость точки B. Поэтому угловая скорость четвертого стержня вычисляется по формуле  и
и  2,7 с -1 .
2,7 с -1 .
6. Определим ускорение точки А. Так как первый стержень вращается равномерно, то точка А имеет относительно О1 только нормальное ускорение, которое вычисляется по формуле  = 6,4 м/с 2 .
= 6,4 м/с 2 .
7. Определим ускорение точки В, которая принадлежит двум стержням — АВ и О2В. Поэтому ускорение точки В определяется с помощью двух формул
 и
и  , где
, где
 — ускорение точки А;
— ускорение точки А;
 — нормальное ускорение точки В относительно А;
— нормальное ускорение точки В относительно А;
 — тангенциальное ускорение точки В относительно А;
— тангенциальное ускорение точки В относительно А;
 — нормальное ускорение точки В относительно О2;
— нормальное ускорение точки В относительно О2;
 — тангенциальное ускорение точки В относительно О2.
— тангенциальное ускорение точки В относительно О2.
 = 6,4 м/с 2 ;
= 6,4 м/с 2 ;  = 4,3 м/с 2 .
= 4,3 м/с 2 .
Можно составить уравнение
 , которое в проекциях на оси координат имеет вид
, которое в проекциях на оси координат имеет вид

Решив полученную систему двух уравнений с двумя неизвестными, получим:
 = 13,2 м/с 2 , аВХ = 4,1 м/с 2 , аВY =9,1 м/с 2 , аВ =10 м/с 2 .
= 13,2 м/с 2 , аВХ = 4,1 м/с 2 , аВY =9,1 м/с 2 , аВ =10 м/с 2 .
8. Определим угловое ускорение стержня АВ, используя формулу  = 13,2 с -2 .
= 13,2 с -2 .
Задача 2.13.
Круглая пластина радиуса R=60 см вращается вокруг неподвижной оси по закону  (рис.2.18 а). Положительное направление угла
(рис.2.18 а). Положительное направление угла  показано на рисунке дуговой стрелкой. Ось вращения ОО1 лежит в плоскости пластины (пластина вращается в пространстве). По окружности радиуса R движется точка М. Закон ее движения по дуге окружности s=
показано на рисунке дуговой стрелкой. Ось вращения ОО1 лежит в плоскости пластины (пластина вращается в пространстве). По окружности радиуса R движется точка М. Закон ее движения по дуге окружности s=  АМ=
АМ=  . На рисунке точка М показана в положении, когда s положительно, при s отрицательном точка М находится по другую сторону от точки А; L=R.
. На рисунке точка М показана в положении, когда s положительно, при s отрицательном точка М находится по другую сторону от точки А; L=R.
Найти абсолютную скорость и абсолютное ускорение точки М в момент времени t=1 с.
| а) | 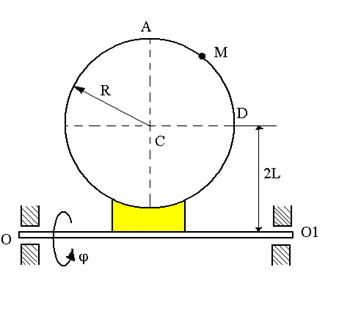 |
| б) | 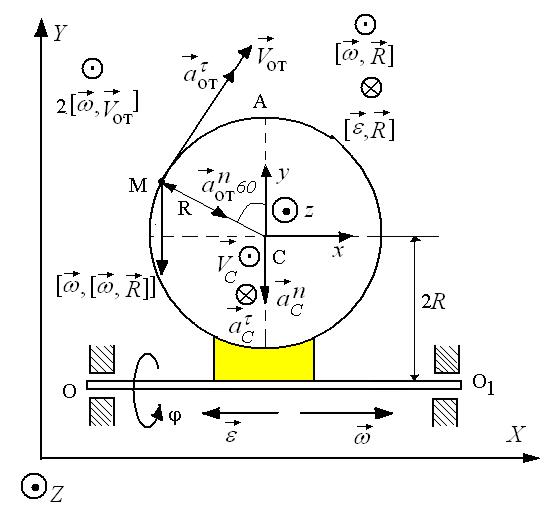 |
| Рис.2.18. К задаче 2.13. |
Решение (рис.2.13 б)
В качестве подвижной системы координат xyz примем точку С. Эта система совершает вращательное движение с угловой скоростью  = 5 с -1 . Угловое ускорение
= 5 с -1 . Угловое ускорение  = -10 с -2 . Направления векторов
= -10 с -2 . Направления векторов  и
и  опледеляются по правилу буравчика и изображены на рис. Причем, вектор направлен в противоположную сторону, так как его значение его проекции на ось OХ неподвижной системы координат XYZ отрицательно. Вычислим скорость и ускорение центра подвижной системы координат С, которая движется по окружности. Скорость вычисляется по формуле
опледеляются по правилу буравчика и изображены на рис. Причем, вектор направлен в противоположную сторону, так как его значение его проекции на ось OХ неподвижной системы координат XYZ отрицательно. Вычислим скорость и ускорение центра подвижной системы координат С, которая движется по окружности. Скорость вычисляется по формуле  , равна 600 см/с и первендикулярна плоскости рисунка. Ускорение точки С состоит из двух компонент — нормальное
, равна 600 см/с и первендикулярна плоскости рисунка. Ускорение точки С состоит из двух компонент — нормальное  = 3000 см/с 2 и тангенциальное
= 3000 см/с 2 и тангенциальное  = 1200 см/с 2 ускорения.
= 1200 см/с 2 ускорения.
Вычислим путь, относительную скорость и ускорение точки M. Ее положение определяется величиной дуги S, в данный момент времени S =  , поэтому она располагается слева от точки А. Относительная скорость
, поэтому она располагается слева от точки А. Относительная скорость  . В данный момент времени она равна 63 см/с и направлена по касательной к окружности. Относительное ускорение является суммой двух составляющих — тангенциальное
. В данный момент времени она равна 63 см/с и направлена по касательной к окружности. Относительное ускорение является суммой двух составляющих — тангенциальное  = 377 см/с -2 и нормальное
= 377 см/с -2 и нормальное  = 66 см/с -2 .
= 66 см/с -2 .
Абсолютная скорость точки M определяется по формуле

Где —  переносная скорость вращательного движения, модуль которой
переносная скорость вращательного движения, модуль которой  = 150 см / с, ее направление определяется по правилу Жуковского. В разложении на оси координат
= 150 см / с, ее направление определяется по правилу Жуковского. В разложении на оси координат
По теореме Пифагора  = 750 м /с.
= 750 м /с.
Абсолютное ускорение точки M определяется по формуле

Где  и
и  — соответственно нормальное и тангенциальное переносные ускорения вращательного движения,
— соответственно нормальное и тангенциальное переносные ускорения вращательного движения,  — кориолисово ускорение.
— кориолисово ускорение.
 = 750 м / с -2 ;
= 750 м / с -2 ;  =300 м / с -2 ;
=300 м / с -2 ;  = 546 м / с -2
= 546 м / с -2
 ;
;
 ;
;
http://zaochnik.com/spravochnik/fizika/osnovy-dinamiki/uravnenie-dvizhenija-materialnoj-tochki/
http://helpiks.org/6-13823.html