Динамика материальной точки. Все законы и теоремы
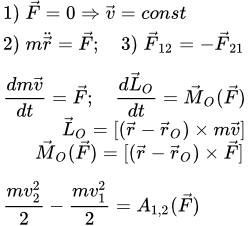
Законы динамики
Первый закон Ньютона (закон инерции Галилея)
Существуют такие системы отсчета, относительно которых любая материальная точка, не взаимодействующая с другими телами и точками, движется прямолинейно и равномерно. В частности, если точка покоилось в определенный момент времени, то она будет покоиться и в последующие моменты.
Не во всех системах отсчета выполняется закон инерции. Например, если мы выберем систему отсчета, связанную с ускоряющейся ракетой, то относительно этой системы, не взаимодействующие материальные точки, не будут двигаться прямолинейно и равномерно.
Инерциальная система отсчета – это система отсчета, в которой справедлив закон инерции.
Движение по инерции – это движение точки, совершаемое при отсутствии действующих на нее сил.
Второй закон Ньютона (основной закон динамики)
Взаимодействие на выбранную материальную точку со стороны других тел описывается вектором, который называется силой. При этом, в инерциальных системах отсчета, действие силы приводит к ускорению точки , которое пропорционально приложенной силе, имеет одинаковое с ней направление, и обратно пропорционально массе точки:
(1) .
Если есть радиус-вектор, проведенный из начала координат к точке, то ускорение есть вторая производная радиус-вектора по времени:
.
Производную по времени, в теоретической механике, обозначают точкой над переменной, а не штрихом, как в математическом анализе.
Если на точку действует не одна, а n сил, то в правой части производится суммирование по всем силам, действующих на точку. Тогда уравнение (1) примет вид:
(2) .
Третий закон динамики (закон равенства действия и противодействия)
Если две материальные точки действуют друг на друга, то сила, с которой первая точка действует на вторую, равна по абсолютной величине и противоположна по направлению силе, с которой вторая точка действует на первую. При этом силы направлены вдоль прямой, соединяющей точки.
Закон независимости сил
Несколько одновременно действующих на материальную точку сил сообщают точке такое ускорение, какое сообщила бы ей одна сила, равная их геометрической сумме.
То есть уравнение (2) можно записать в виде:
, где .
Задачи динамики
Первая задача динамики
Зная закон движения точки, определить действующую на нее силу.
Вторая (основная) задача динамики
Зная действующие на точку силы, определить ее закон движения.
Основные виды сил
Единицей измерения силы в СИ является 1 ньютон (1 Н = кг·м/с 2 ). Это сила, которую нужно приложить к точке массой 1 кг, чтобы она получила ускорение 1 м/с 2 .
Сила тяжести.
Сила тяжести действует на любую материальную точку, находящуюся на поверхности Земли. Она пропорциональна массе точки и равна
,
где – ускорение свободного падения, направленное вниз. Его величина зависит от широты и высоты над уровнем моря. Стандартное значение, принятое при построении систем единиц, составляет м/с 2 .
Сила тяготения.
.
Здесь – массы точек, r – расстояние между ними, Н·м 2 /кг 2 – гравитационная постоянная.
Для точки массы m на поверхности Земли имеем: . Отсюда . Тогда силу тяготения Земли можно вычислять по формуле:
,
где R = 6371 км – радиус Земли; r – расстояние от точки до центра Земли.
Сила электростатического взаимодействия.
,
где – величины зарядов; r – расстояние между ними; Н·м 2 /Кл 2 – коэффициент. Одноименные заряды отталкиваются, разноименные – притягиваются.
Сила трения скольжения
возникает при скольжении одного тела по поверхности другого. Она направлена в сторону, противоположную скорости движения. Ее величина определяется по формуле:
F = fN ,
где N – сила давления, перпендикулярная поверхности, с которой скользящее тело прижимается к поверхности; f – коэффициент трения, который зависит от материалов соприкасаемых тел.
Сила упругости.
Эта сила возникает при деформации упругих тел. Это могут быть растяжения, сжатия и изгибы. Она определяется по формуле
F = cλ ,
где λ – величина деформации; c – коэффициент, который зависит от материала упругого тела. Для пружины λ – это удлинение или сжатие пружины; c – коэффициент жесткости.
Сила вязкого трения.
При движении тела в вязкой среде с небольшими скоростями, на него действует сила трения, пропорциональная скорости движения:
F = μv ,
где v – скорость тела; μ – коэффициент сопротивления.
При больших скоростях, сила трения пропорциональна квадрату скорости.
Дифференциальные уравнения движения точки
Спроектируем уравнение (2) на оси прямоугольной системы координат. Пусть радиус вектор точки имеет в этой системе компоненты (проекции) . Тогда из векторного уравнения (2) получаем систему уравнений:
.
Это есть дифференциальные уравнения движения точки в прямоугольной системе координат.
Спроектируем уравнение (2) на оси естественного трехгранника:
.
Здесь – единичный вектор, направленный по касательной к траектории; – единичный вектор, перпендикулярный и лежащий в касательной плоскости траектории; – единичный вектор, перпендикулярный и . Поскольку , то .
Вводим пройденный путь s , измеренный вдоль дуги траектории точки. Пусть ρ – радиус кривизны траектории в рассматриваемой точке. Тогда, для естественного способа задания движения точки, уравнения движения примут вид:
.
Уравнения движения в полярных координатах для плоского движения:
.
Прямолинейное движение точки
Пусть ось x направлена вдоль линии движения точки. Тогда уравнение движения имеет вид:
(3) .
Его общее решение:
,
где – произвольные постоянные. Их находят из начальных условий:
.
Если сила Fx зависит только от времени, то из уравнения (3) сначала определяют скорость vx , а затем координату x , последовательно интегрируя уравнения:
.
Если сила зависит только от координаты x , то выполняют преобразование:
;
;
.
Колебательное движение материальной точки
Свободные колебания
Рассмотрим движение груза на пружинке. Считаем, что груз является материальной точкой; массой пружины можно пренебречь; и отсутствует сила тяжести. Пусть движение происходит вдоль оси x . За начало отсчета выберем такое положение груза, при котором пружина не деформирована. Тогда на точку действует только восстанавливающая сила упругости пружины, которая определяется по закону Гука:
(К1) ,
где x – деформация пружины; c – коэффициент жесткости. Он равен силе, которая возникает при деформации, равной единице (один метр) и имеет размерность [Н/м]. Из (К1) видно, что сила является восстанавливающей, то есть направлена так, чтобы вернуть точку в начало координат к недеформированному состоянию. Сила такого вида возникает не только при деформации пружины, но и во многих других случаях при небольшом отклонении точки от равновесного положения.
Составим уравнение движения точки и выполняем преобразования:
.
Введем обозначение . В результате получаем.
(К2) .
Уравнение (К2) называется дифференциальным уравнением свободных колебаний. Его также называют дифференциальным уравнением гармонических колебаний. Оно является линейным однородным дифференциальным уравнением второго порядка.
Ищем его решение в виде . Получаем характеристическое уравнение:
.
Оно имеет два мнимых корня: . Тогда общее решение уравнения (К2) имеет вид:
,
где и – произвольные постоянные. Они определяются из начальных условий. Пусть – координата и скорость точки в начальный момент времени , тогда
;
.
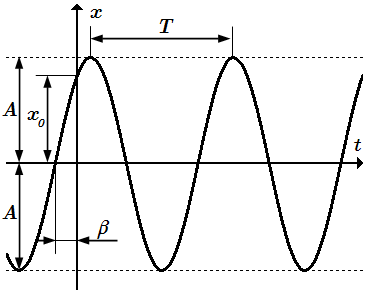
График гармонического движения точки.
Часто бывает удобно вместо постоянных интегрирования и перейти к новым постоянным A и β по формулам: . Тогда
(К3) .
Это есть уравнение гармонического колебательного движения точки. Здесь – амплитуда колебаний;
– фаза колебаний;
β – начальная фаза, ;
– циклическая частота колебаний, которую также называют угловой или собственной.
Период колебаний: .
Частота колебаний: – это число циклов колебаний, совершенных в единицу времени. Она широко применяется в технике, однако для математического описания более удобна угловая частота, которую мы будем использовать в дальнейшем и называть просто частотой.
Частота k и период T не зависят от начальных условий, а амплитуда и фаза – зависят. Кроме этого, k и T не зависят от амплитуды. Колебания, у которых частота и период не зависят от амплитуды, называют изохорными колебаниями. Если рассмотреть колебания с большой амплитудой, при которой закон Гука (К1) не выполняется, то уравнение (К2) не будет линейным и колебания не будут изохорными.
Влияние постоянной силы
Пусть теперь, наряду с восстанавливающей силой (К1), на точку действует постоянная сила P , например сила тяжести. Тогда уравнение движения примет вид:
.
Это приводит к смещению центра колебаний в сторону действия силы P на величину
δ ст = P/c .
Это смещение называют статическим отклонением. Если P – сила тяжести, то
.
Колебания при вязком трении
Пусть на точку, кроме силы упругости пружины, действует сила сопротивления среды. При малых скоростях она пропорциональна скорости точки:
. Это так называемое вязкое трение. Составим уравнение движения:
. Обозначив μ/m= 2 b , получаем:
(К4) . Составляем характеристическое уравнение:
(К5) . Оно имеет два корня:
.
Затухающие колебания
При b , корни характеристического уравнения (К5) комплексные:
. Тогда общее решение уравнения (К4) имеет вид:
,
где . Обозначим , . Тогда
(К6) .
, ;
– амплитуда (переменная величина);
b – коэффициент затухания;
– частота затухающих колебаний;
– период затухающих колебаний. Он больше периода свободных колебаний. При небольшом коэффициенте затухания (при b/k ≪ 1 ) T 1 ≈ T .
Колебания, происходящие по закону (К6) называются затухающими. График затухающих колебаний заключен между двумя кривыми x = ±Ae –bt , симметричными относительно оси t .
Затухающие колебания можно рассматривать как гармонические колебания с переменной амплитудой . Относительное изменение переменной амплитуды за период колебания называется декрементом колебаний. Он равен
. Модуль логарифма декремента называется логарифмическим декрементом. Он равен .
Апериодическое движение точки
При (или ) корни характеристического уравнения (К5) действительные. Поэтому движение точки является апериодическим.
При (или ) характеристическое уравнение (К5) имеет два различных действительных корня:
. Тогда общее решение уравнения (К4) имеет вид:
(К7) .
Сюда не входят тригонометрические функции. Поэтому это апериодическое движение. Точка может пройти через положение равновесия x = 0 не более одного раза.
Закон движения (К7) можно выразить через гиперболические функции, если положить: . Тогда
.
Перейдем к новым постоянным интегрирования A и β , выполнив подстановку:
. Тогда
.
При b = k характеристическое уравнение (К5) имеет два кратных вещественных корня . Общее решение уравнения (К4) имеет вид:
.
Движение также апериодическое. Точка может пройти через положение равновесия x = 0 не более одного раза.
Вынужденные колебания
Рассмотрим случай, когда кроме восстанавливающей силы , на точку действует возмущающая сила, меняющаяся по гармоническому закону:
(К8) . Составим уравнение движения:
.
Введем обозначение h=H/m . Разделив на m , получаем дифференциальное уравнение вынужденных колебаний:
(К9) .
Это линейное неоднородное дифференциальное уравнение с постоянными коэффициентами со специальной неоднородной частью. Его общее решение равно сумме общего решения однородного уравнения и частного (то есть любого, отличного от нулевого) решения данного уравнения:
;
;
.
Общее решение однородного уравнения: .
Ищем частное решение в виде . В результате получаем:
;
.
Коэффициент динамичности. Действие постоянной возмущающей силы величины H приводит к статическому отклонению . Периодическая возмущающая сила (К8) с амплитудой H приводит к периодическим колебаниям с амплитудой . В связи с этим вводят коэффициент динамичности: .
Он показывает, во сколько раз амплитуда колебаний превосходит статическое отклонение.
Явление резонанса и биения
Когда частота возмущающей силы равна частоте собственных колебаний p = k , коэффициент динамичности стремится к бесконечности, амплитуда колебаний неограниченно возрастает. Это явление называется резонансом. Уравнение движения точки при p = k имеет вид:
(К10) .
Оно имеет частное решение
.
Общее решение уравнения (К10):
.
Это уравнение показывает, что амплитуда вынужденных колебаний возрастает пропорционально времени. Фаза вынужденных колебаний отстает от фазы возмущающей силы на π/ 2 .
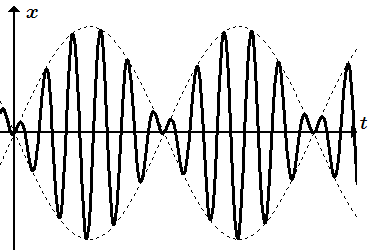
Биения.
Когда частота p возмущающей силы близка к собственной частоте k колебания точки, p/k ≈ 1 , возникает явление, называемое биениями. В этом случае частное решение уравнения (К9) имеет вид:
,
где .
Происходит наложение колебаний. Их можно рассматривать как вынужденные колебания частоты с переменной амплитудой, которая является периодической функцией с частотой .
Вынужденные колебания при наличии вязкого трения
Составим уравнение движения вынужденных колебаний при наличии вязкого трения:
.
Получаем дифференциальное уравнение:
.
Его общее решение имеет вид.
1) при b :
;
2) при b > k :
;
3) при b = k :
.
Здесь ;
ε определяется из уравнений:
.
Величины A и β являются постоянными интегрирования. Они определяются из начальных условий.
Общие теоремы динамики точки
Теорема об изменении количества движения материальной точки
Теорема об изменении количества движения материальной точки в дифференциальной форме
Изменение количества движения материальной точки за бесконечно малый промежуток времени dt равно элементарному импульсу равнодействующей сил, приложенных к этой точке:
.
Эту теорему можно сформулировать так:
Производная по времени от количества движения материальной точки равна равнодействующей сил, приложенных к этой точке:
(Т1) .
Проектируя это векторное уравнение на оси координат, получаем три скалярных уравнения:
.
Если проинтегрировать уравнение (Т1) по времени от начального момента времени t = 0 до конечного момента t = t1 , то получим теорему в интегральной форме.
Теорема об изменении количества движения материальной точки в интегральной форме
изменение количества движения материальной точки за конечный промежуток времени [0,t1] равно импульсу силы, приложенной к этой точке, за тот же промежуток времени:
.
Здесь – скорость точки в моменты времени t = 0 и t = t 1 , соответственно.
Теорема об изменении момента количества движения материальной точки
Теорема об изменении момента количества движения материальной точки
Производная по времени от момента количества движения материальной точки, относительно произвольного центра O , равна моменту равнодействующей силы, приложенной к точке, относительно того же центра:
.
Проектируя это векторное уравнение на оси координат, получаем три скалярных уравнения:
.
Если на точку действует несколько сил , то равнодействующая сила равна их геометрической сумме:
.
Тогда можно записать эту теорему так:
.
Далее будем считать, что точка O выбрана в начале координат. Тогда .
Центральная сила. Второй закон Кеплера
Пусть на точку действует центральная сила с центром в начале координат O . Тогда ее момент относительно O равен нулю. По теореме об изменении момента количества движения материальной точки имеем:
.
Если ввести секторную скорость , то она оказывается постоянной
.
Получаем второй закон Кеплера (закон площадей).
Второй закон Кеплера (закон площадей)
Под действием центральной силы точка движется по плоской кривой с постоянной секторной скоростью. То есть радиус-вектор точки заметает равные площади в любые равные промежутки времени.
Работа силы. Мощность
Основные понятия
Единицей измерения работы в СИ является 1 джоуль (1 Дж = 1 Н·м = кг·м 2 /с 2 ).
Работа силы при движении материальной точки от точки M 1 до точки M 2 равна сумме (интегралу) элементарных работ:
.
Если ввести скорость точки , то
.
Теорема о работе силы
Работа A равнодействующей силы на некотором перемещении равна алгебраической сумме работ Ak составляющих сил на том же перемещении:
.
Мощность – это величина работы, произведенная за единицу времени.
.
Единицей измерения мощности в СИ является 1 ватт (1 Вт = 1 Дж/с). Другие единицы мощности: 1 кВт (киловатт) = 1000 Вт; 1л.с.(лошадиная сила) = 736 Вт = 75 кгс·м/с.
Работа основных видов сил
Работа силы тяжести:
,
где P – сила тяжести, действующая на точку. Если начальная точка выше конечной, то работа положительна; если начальная точка ниже конечной, то отрицательна.
Работа силы упругости:
.
Здесь – деформация пружины в начальном положении; – в конечном.
Работа силы трения. Если сила трения постоянна, то
,
где s – длина пройденного точкой пути; – сила трения, которая всегда направлена в сторону, противоположную перемещению; f – коэффициент трения; N – нормальная реакция поверхности. Работа силы трения всегда отрицательна.
Работа силы тяготения.
На точку, находящуюся вблизи планеты Земля, на расстоянии r ≥ R от ее центра, действует сила притяжения
,
где R = 6371 км – радиус Земли. Тогда при перемещении точки из положения M1 в положение M2, сила тяготения совершит работу
.
Она не зависит от траектории движения тела.
Теорема об изменении кинетической энергии точки
Теорема об изменении кинетической энергии точки в дифференциальной форме
Дифференциал кинетической энергии точки равен сумма элементарных работ всех действующих на точку сил:
.
Проинтегрировав обе части этого уравнения вдоль траектории движения точки от положения M1 до M2, получим теорему в интегральной форме.
Теорема об изменении кинетической энергии точки
Изменение кинетической энергии материальной точки, при переходе ее из начального положения M1 в конечное положение M2, равно сумме работ всех сил, приложенных к точке на этом перемещении:
.
Силовые поля и потенциальная энергия
1. Работа сил стационарного поля при перемещении точки из положения M1 в положение M2 зависит только от начального положения M1, конечного положения M2, и формы траектории, но не зависит от закона движения точки.
2. Работа, совершенная полем при перемещении точки из положения M1 в M2 равна по модулю и обратна по величине работе, совершенной полем при перемещении точки из M2 в M1 при перемещении по той же траектории:
.
Для нестационарных полей эти свойства на выполняются.
Примеры стационарных полей: поле силы тяжести на поверхности Земли; электростатическое поле от неподвижно закрепленного заряда; поле силы упругости пружины, один конец которой закреплен.
Потенциальное силовое поле – это стационарное силовое поле, работа сил которого зависит только от начального M1 и конечного M2 положений точки, и не зависит от формы ее траектории. Потенциальное силовое поле также называют консервативным.
В потенциальном поле существует такая функция, через которую можно выразить вектор силы , действующей на точку.
Силовая функция – это функция, зависящая от координат точки ( x, y, z ) , через которую выражаются проекции силы потенциального поля на оси координат:
.
Отсюда следует, что сила не изменится, если к силовой функции прибавить постоянную. Таким образом, силовая функция определена с точностью до произвольной постоянной.
В потенциальном поле элементарная работа является дифференциалом от силовой функции:
.
Работа при конечном перемещении из точки в точку равна разности силовой функции в этих точках:
.
Таким образом, в потенциальном поле, работа сил поля не зависит от формы траектории. На замкнутом перемещении работа равна 0. Для более наглядной физической интерпретации, вводят понятие потенциальной энергии. Она равна, с точностью до произвольной постоянной, силовой функции, взятой с обратным знаком.
Потенциальная энергия П – это работа, которую нужно совершить при перемещении точки в потенциальном поле из данного положения в произвольным образом выбранное нулевое положение.
Так, для поля деформации, в качестве нулевого положения обычно принимают не деформированное положение; для гравитационного и электростатических полей за нулевое выбирают положение, бесконечно удаленное от тела или заряда. Для силы тяжести в поле Земли принимают любое, удобное для расчета положение. Таким образом, потенциальная энергия равна силовой функции, взятой с обратным знаком плюс постоянная, зависящая от выбора нулевого положения:
.
Пусть – нулевое положение. Тогда
;
.
Работа сил поля при перемещении системы из 1-го положения во 2-ое равна разности потенциальных энергий: .
Эквипотенциальные поверхности – это поверхности равного потенциала:
.
Сила направлена перпендикулярно эквипотенциальной поверхности.
Закон сохранения механической энергии
Если точка находится в потенциальном поле, то сумма ее кинетической и потенциальной энергий является постоянной:
.
Если на точку действуют несколько сил от разных потенциальных полей, то в качестве потенциальной энергии нужно взять сумму потенциальных энергий от каждого силового поля:
.
Основные виды потенциальных полей
В поле силы тяжести, потенциальная энергия зависит от высоты. Направив ось z вертикально вверх, получим: .
Поле силы упругости пружины. В этом поле, потенциальная энергия зависит от деформации λ пружины:
.
В качестве нулевого положения выбирают положение без деформации: λ = 0 .
Сила гравитационного притяжения и космические скорости
Между любыми двумя точками массами m 1 и m 2 , действует сила всемирного тяготения. Так, на точку 2 действует сила притяжения со стороны точки 1:
,
направленная вдоль прямой, проходящей через точку 1. Здесь r – расстояние между точками; Н·м 2 /кг 2 – гравитационная постоянная.
В результате притяжения, обе точки получают ускорения и движутся друг относительно друга. Мы рассмотрим более простой, но важный случай, когда масса M = m 1 одного из тел намного больше массы m = m 2 второго тела. Тогда точка с меньшей массой практически не оказывает влияния на движение более массивной точки. Выберем начало инерциальной системы координат в точке 1. Тогда силу гравитационного притяжения можно рассматривать как центральную силу и представить ее в векторном виде:
(П1) .
Потенциальная энергия точки 2:
(П2) .
Здесь нулевое положение выбрано на бесконечности: .
Формулы (П1) и (П2) справедливы, если объект 1 является шаром с плотностью, зависящей только от расстояния r до его центра. Пусть R – радиус такого шара. Тогда в формулах (П1) и (П2) r – это расстояние от центра шара 1 до точки 2. Они справедливы при .
Эти формулы можно использовать при расчете движения спутников вокруг Земли. Поскольку Земля вращается вокруг своей оси, то ее форма является эллипсоидом. Но в первом приближении Землю можно считать шаром радиуса R = 6371 км. Из таких допущений можно оценить космические скорости, необходимые для выведения летательных аппаратов на космические орбиты.
Первая космическая скорость – это скорость, которую необходимо сообщить телу на поверхности Земли, чтобы оно вышло на круговую орбиту. Она равна км/с. Если у тела первая космическая скорость, то оно может вращаться по круговой орбите, не падая на Землю, то есть стать ее спутником.
Вторая космическая скорость – это скорость, которую необходимо сообщить телу на поверхности Земли, чтобы оно вышло на параболическую орбиту. Она равна км/с. Если у тела скорость больше второй космической, то ее траекторией является гипербола, и, при отсутствии помех, оно будет удаляться от Земли и никогда не вернется назад.
Однако Солнце является той преградой, которая не даст спутнику со второй космической скоростью удалиться на бесконечное расстояние. Чтобы тело могло покинуть пределы солнечной системы, ему необходимо сообщить третью космическую скорость км/с.
Использованная литература:
А. А. Яблонский, Курс теоретической механики, часть II, динамика. Москва, «Высшая школа», 1966.
С. М. Тарг, Краткий курс теоретической механики, «Высшая школа», 2010.
Автор: Олег Одинцов . Опубликовано: 11-12-2019
Тема 3.1. Основные понятия и аксиомы динамики
§1. Динамика точки. Основные понятия и определения.
В разделе кинематики исследовалось движение тел без учета причин, обеспечивающих это движение. Рассматривалось движение, заданное каким-либо способом и определялись траектории, скорости и ускорения точек этого тела.
В разделе динамики решается более сложная и важная задача. Определяется движение тела под действием сил приложенных к нему, с учетом внешних и внутренних условий, влияющих на это движение, включая самих материальных тел.
Динамикой называется раздел механики, в котором изучаются законы движения материальных тел под действием сил.
Понятие о силе, как о величине, характеризующей меру механического взаимодействия материальных тел, было введено в статике. Но при этом в статике мы, по существу, считали все силы постоянными. Между тем, на движущееся тело наряду с постоянными силами (постоянной, например, можно считать силу тяжести) действуют обычно силы переменные, модули и направления которых при движении тела изменяются.
Сила – векторная физическая величина, характеризующая действие одного тела на другое, в результате чего у тела изменяется скорость, то есть появляется ускорение, или происходит деформация тела, либо имеет место и то, и другое. В том случае, когда тело при взаимодействии получает ускорение, говорят о динамическом проявлении сил. В том случае, когда тело при взаимодействии деформируется, говорят о статическом проявлении сил.
Как показывает опыт, переменные силы могут определенным образом зависеть от времени, от положения тела и от его скорости. В частности, от времени зависит сила тяги электровоза при постепенном выключении или включении реостата; от положения тела зависит сила упругости пружины; от скорости движения зависят силы сопротивления среды (воды, воздуха).
К понятию об инертности тел мы приходим, сравнивая результаты действия одной и той же силы на разные материальные тела. Опыт показывает, что если одну и ту же силу приложить к двум разным, свободным от других воздействий покоящимся телам, то в общем случае по истечении одного и того же промежутка времени эти тела пройдут разные расстояния и будут иметь разные скорости.
Инертность и представляет собой свойство материальных тел быстрее или медленнее изменять скорость своего движения под действием приложенных сил. Если, например, при действии одинаковых сил изменение скорости первого тела происходит медленнее, чем второго, то говорят, что первое тело является более инертным, и наоборот.
Количественной мерой инертности данного тела является физическая величина, называемая массой тела. В механике масса т рассматривается как величина скалярная, положительная и постоянная для каждого данного тела.
За единицу массы принят эталон – сплав платины и иридия, хранящийся в палате мер и весов в Париже: [m]=кг. Масса–величина аддитивная
и скалярная.
В общем случае движение тела зависит не только от его суммарной массы и приложенных сил; характер движения может еще зависеть от формы тела, точнее от взаимного расположения образующих его частиц (т.е. от распределения масс).
Под материальной точкой понимают материальное тело столь малых размеров, что различием в движении отдельных его точек можно пренебречь и положение которого можно определить координатами одной из его точек.
Практически данное тело можно рассматривать как материальную точку в тех случаях, когда расстояния, проходимые точками тела при его движении, очень велики по сравнению с размерами самого тела. Кроме того, как будет показано в динамике системы поступательно движущееся тело можно всегда рассматривать как материальную точку с массой, равной массе всего тела.
Наконец, материальными точками можно считать частицы, на которые мы будем мысленно разбивать любое тело при определении тех или иных его динамических характеристик.
Точку будем называть изолированной, если на точку не оказывается никакого влияния, никакого действия со стороны других тел и среды, в которой точка движется. Конечно, трудно привести пример подобного состояния. Но представить такое можно.
При вращательном движении тела точки могут двигаться неодинаково, в этом случае некоторые положения динамики можно применять только к отдельным точкам, а материальный объект рассматривать как совокупность материальных точек.
§2. Законы динамики
В основе динамики лежат законы, установленные путем обобщения результатов целого ряда опытов и наблюдений над движением тел и проверенные обширной общественно-исторической практикой человечества. Систематически эти законы были впервые изложены И. Ньютоном.
Первый закон (закон инерции), открытый Галилеем, гласит: существуют такие системы отсчета, относительно которых тело покоится или движется прямолинейно и равномерно, если на него не действуют другие тела или действие этих тел компенсировано.
или в другой формулировке
если сумма действующих на тело сил равна нулю, то тело движется равномерно и прямолинейно или находится в покое.
Движение, совершаемое точкой при отсутствии сил, называется движением по инерции.
Закон инерции отражает одно из основных свойств материи — пребывать неизменно в движении и устанавливает для материальных тел эквивалентность состояний покоя и движения по инерции. Из него следует, что если F=0, то точка покоится или движется с постоянной по модулю и направлению скоростью (
Теоретическая механика. В помощь студенту
Теоретическая механика – это раздел механики, в котором излагаются основные законы механического движения и механического взаимодействия материальных тел.
Теоретическая механика является наукой, в которой изучаются перемещения тел с течением времени (механические движения). Она служит базой других разделов механики (теория упругости, сопротивление материалов, теория пластичности, теория механизмов и машин, гидроаэродинамика) и многих технических дисциплин.
Механическое движение — это изменение с течением времени взаимного положения в пространстве материальных тел.
Механическое взаимодействие – это такое взаимодействие, в результате которого изменяется механическое движение или изменяется взаимное положение частей тела.
Статика твердого тела
Статика — это раздел теоретической механики, в котором рассматриваются задачи на равновесие твердых тел и преобразования одной системы сил в другую, ей эквивалентную.
- Основные понятия и законы статики
Сила как вектор характеризуется точкой приложения, направлением действия и абсолютным значением. Единица измерения модуля силы – Ньютон.
Распределенная нагрузка задается силой, действующей на единицу объема (поверхности, длины).
Размерность распределенной нагрузки – Н/м 3 (Н/м 2 , Н/м).
Принятое обозначение:
 .
. .
. .
.Принятое обозначение:
 .
. Под действием пары сил тело будет совершать вращательное движение.
Проекция положительна, если направление отрезка совпадает с положительным направлением оси.
Равномерное и прямолинейное движение материальной точки является движением по инерции. Под состоянием равновесия материальной точки и твердого тела понимают не только состояние покоя, но и движение по инерции. Для твердого тела существуют различные виды движения по инерции, например равномерное вращение твердого тела вокруг неподвижной оси.
Эти две силы называются уравновешивающимися.
Вообще силы называются уравновешивающимися, если твердое тело, к которому приложены эти силы, находится в покое.
Следствие. Не нарушая состояния твердого тела, силу можно переносить по ее линии действия в любую точку тела.
Две системы сил называются эквивалентными, если одну из них можно заменить другой, не нарушая состояния твердого тела.
диагонали.
По модулю равнодействующая равна:

Следует иметь в виду, что действие — сила, приложенная к телу Б, и противодействие — сила, приложенная к телу А, не уравновешиваются, так как они приложены к разным телам.
Не следует при этом забывать, что условия равновесия, являющиеся необходимыми и достаточными для твердого тела, являются необходимыми, но недостаточными для соответствующего нетвердого тела.
- Связи и их реакции
- Гладкая поверхность ограничивает перемещение по нормали к поверхности опоры. Реакция направлена перпендикулярно поверхности.
- Шарнирная подвижная опора ограничивает перемещение тела по нормали к опорной плоскости. Реакция направлена по нормали к поверхности опоры.
- Шарнирная неподвижная опора противодействует любому перемещению в плоскости, перпендикулярной оси вращения.
- Шарнирный невесомый стержень противодействует перемещению тела вдоль линии стержня. Реакция будет направлена вдоль линии стержня.
- Глухая заделка противодействует любому перемещению и вращению в плоскости. Ее действие можно заменить силой, представленной в виде двух составляющих и парой сил с моментом.
- Момент силы относительно точки
- Абсолютное значение момента равно произведению модуля силы на кратчайшее расстояние h от центра вращения до линии действия силы. Расстояние h называют плечом силы.

- Момент считают положительным, если сила стремится вращать плечо h против хода часовой стрелки и отрицательным при вращении по ходу часовой стрелки.
- Свойства момента силы относительно точки:
1) Момент силы не изменится при переносе точки приложения силы вдоль линии действия силы.
2) Момент силы равен нулю, если линия действия силы проходит через точку приложения силы.
3) Момент равнодействующей силы относительно точки равен сумме моментов слагаемых сил относительно этой точки.,
где

 ,
, 
- Момент силы относительно оси
- Момент силы относительно оси — это момент проекции этой силы на плоскость, перпендикулярную оси, относительно точки пересечения оси с плоскостью.
Момент считается положительным, если с положительного конца оси поворот, который сила стремится совершить, виден происходящим против хода часовой стрелки, и отрицательным – если по ходу часовой стрелки. - Чтобы найти момент силы относительно оси, нужно:
1) Провести плоскость перпендикулярную оси z.
2) Спроецировать силуна эту плоскость и вычислить величину проекции .
3) Провести плечо h из точки пересечения оси с плоскостью на линию действия проекции силыи вычислить его длину.
4) Найти произведение этого плеча и проекции силы с соответствующим знаком. - Свойства момента силы относительно оси.
Момент силы относительно оси равен нулю, если:
1), то есть сила параллельна оси.
2) h=0, то есть линия действия силы пересекает ось.

 .
.  , то есть сила
, то есть сила - Момент пары сил
- Момент пары сил равен произведению одной силы на кратчайшее расстояние между линиями действия сил пары, которое называется плечом пары (пара сил оказывает на тело вращающее действие) ,
где:— силы, составляющие пару;
h — плечо пары.
Момент пары считают положительным, если силы стремятся вращать плечо против хода часовой стрелки. - Свойства пары сил.
1) Сумма проекций сил пары на любую ось равна нулю.
2) Не изменяя момента пары можно одновременно соответственно изменять значение сил и плечо пары.
3) Пару можно переносить в плоскости ее действия при этом действие пары на тело не изменится.
 ,
,  — силы, составляющие пару;
— силы, составляющие пару; - Преобразование сходящейся системы сил
- Равнодействующая двух сходящихся сил находится на основании аксиомы о параллелограмме сил.
Геометрическая сумма любого числа сходящихся сил может быть определена путем последовательного сложения двух сил – способ векторного многоугольника.
Вывод: система сходящихся сил () приводится к одной равнодействующей силе . - Аналитически равнодействующая сила может быть определена через ее проекции на оси координат:
Согласно теореме: проекция равнодействующей на ось равна сумме проекций слагаемых сил на эту ось:, или в общем виде
С учетомравнодействующая определяется выражением: . - Направление вектора равнодействующей определяется косинусами углов между вектором и осями x, y, z:
 двух сходящихся сил находится на основании аксиомы о параллелограмме сил.
двух сходящихся сил находится на основании аксиомы о параллелограмме сил.  ) приводится к одной равнодействующей силе
) приводится к одной равнодействующей силе 
 , или в общем виде
, или в общем виде 
 .
.
- Преобразование произвольной системы сил
- Теорема: силу, приложенную к твердому телу, можно, не изменяя оказываемого ею действия, перенести параллельно в другую точку тела, прибавляя при этом пару сил с моментом, равным моменту переносимой силы относительно точки, в которую она переносится.
В результате указанного преобразования получается сходящаяся система сил и сумма моментов пар сил. Действие сходящейся системы сил заменяют действием суммарной силы, действие моментов — суммарным моментом.
Суммарный вектор— это главный вектор системы сил.
Суммарный момент— это главный момент системы сил.
Вывод: произвольная система сил в результате тождественного преобразования приводится к главному вектору и главному моменту системы сил. - Аналитически главный вектор и главный момент системы сил могут быть определены через их проекции на оси координат: ,
 — это главный момент системы сил.
— это главный момент системы сил.  ,
, 
- Условия равновесия систем сил
- Равновесие системы сходящихся сил
Действие системы сходящихся сил эквивалентно действию одной равнодействующей силы.
Для равновесия тела необходимо и достаточно, чтобы равнодействующая равнялась нулю.
Из формулыследует, что для равновесия пространственной системы сходящихся сил необходимо и достаточно, чтобы сумма проекций всех сил на оси X,Y,Z равнялась нулю: - Для равновесия плоской сходящейся системы сил необходимо и достаточно, чтобы сумма проекций всех сил на оси X,Y равнялась нулю:
 .
. 

- Равновесие произвольной системы сил.
- Действие произвольной системы сил эквивалентно действию главного вектора и главного момента. Для равновесия необходимо и достаточно выполнения условия: .
- Для равновесия произвольной системы сил необходимо и достаточно, чтобы суммы проекций всех сил на оси X,Y,Z и суммы моментов всех сил относительно осей X,Y,Z равнялись нулю:
- Для равновесия плоской произвольной системы сил необходимо и достаточно, чтобы сумма проекций главного вектора на оси X,Y, и алгебраическая сумма моментов сил относительно центра О были равны нулю:
 .
.

Кинематика
Кинематика — раздел теоретической механики, в котором рассматриваются общие геометрические свойства механического движения, как процесса, происходящего в пространстве и во времени. Движущиеся объекты рассматривают как геометрические точки или геометрические тела.
- Основные понятия кинематики
- Способы задания движения точки
- Задать движение точки — значит задать изменение ее положения по отношению к выбранной системе отсчета. Существуют три основные системы отсчета: векторная, координатная, естественная.
- В векторной системе положение точки относительно начала отсчета задается радиус-вектором.
Закон движения:. - В системе координат OXYZ положение точки задается тремя координатами X, Y, Z.
Закон движения: x = x(t), y = y(t); z = z(t). - В естественной системе отсчета положение точки задается расстоянием S от начала отсчета до этой точки вдоль траектории.
Закон движения:.
Движение точки, при естественном способе задания движения, определено если известны:
1) Траектория движения.
2) Начало и направление отсчета дуговой координаты.
3) Уравнение движения.
При естественном способе задания движения, в отличии от других способов, используются подвижные координатные оси, движущиеся вместе с точкой по траектории. Такими осями являются:
Касательная (τ) – направлена в сторону возрастания дуговой координаты по касательной к траектории.
Главная нормаль (n) – направлена в сторону вогнутости кривой.
Бинормаль (b) – направлена перпендикулярно к осям τ, n.
 .
. .
. - Определение кинематических характеристик точки
- Траектория точки
В векторной системе отсчета траектория описывается выражением:.
В координатной системе отсчета траектория определяется по закону движения точки и описывается выражениями z = f(x,y) — в пространстве, или y = f(x) – в плоскости.
В естественной системе отсчета траектория задается заранее. - Определение скорости точки в векторной системе координат
При задании движения точки в векторной системе координат отношение перемещения к интервалу времениназывают средним значением скорости на этом интервале времени: .
Принимая интервал времени бесконечно малой величиной, получают значение скорости в данный момент времени (мгновенное значение скорости):.
Вектор средней скоростинаправлен вдоль вектора в сторону движения точки, вектор мгновенной скорости направлен по касательной к траектории в сторону движения точки.
Вывод:скорость точки – векторная величина, равная производной от закона движения по времени.
Свойство производной:производная от какой либо величины по времени определяет скорость изменения этой величины. - Определение скорости точки в координатной системе отсчета
Скорости изменения координат точки:.
Модуль полной скорости точки при прямоугольной системе координат будет равен:.
Направление вектора скорости определяется косинусами направляющих углов:,
где— углы между вектором скорости и осями координат. - Определение скорости точки в естественной системе отсчета
Скорость точки в естественной системе отсчета определяется как производная от закона движения точки:.
Согласно предыдущим выводам вектор скорости направлен по касательной к траектории в сторону движения точки и в осяхопределяется только одной проекцией .
 называют средним значением скорости на этом интервале времени:
называют средним значением скорости на этом интервале времени:  .
.  .
.  направлен вдоль вектора
направлен вдоль вектора  в сторону движения точки, вектор мгновенной скорости
в сторону движения точки, вектор мгновенной скорости  направлен по касательной к траектории в сторону движения точки.
направлен по касательной к траектории в сторону движения точки.  .
.  .
.  ,
,  — углы между вектором скорости и осями координат.
— углы между вектором скорости и осями координат. .
.  определяется только одной проекцией
определяется только одной проекцией  .
.- Ускорение точки
- По определению ускорение характеризует изменение скорости, то есть скорость изменения скорости.
- Ускорения точки в векторной системе отсчета
На основании свойства производной:.
Вектор скорости может изменяться по модулю и направлению.
Вектор ускорения направлен по линии приращения вектора скорости, т. е. в сторону искривления траектории. - Ускорение точки в координатной системе отсчета
Ускорение изменения координат точки равно производной по времени от скоростей изменения этих координат:.
Полное ускорение в прямоугольной системе координат будет определяться выражением:.
Направляющие косинусы вектора ускорения:. - Ускорение точки в естественной системе отсчета Приращение вектора скорости можно разложить на составляющие, параллельные осям естественной системы координат: .
Разделив левую и правую части равенства на dt, получим:,
где— тангенциальное ускорение; — нормальное ускорение;
R — радиус кривизны траектории в окрестности точки.
 .
.  .
.  .
.  .
. можно разложить на составляющие, параллельные осям естественной системы координат:
можно разложить на составляющие, параллельные осям естественной системы координат:  .
.  ,
,  — тангенциальное ускорение;
— тангенциальное ускорение;  — нормальное ускорение;
— нормальное ускорение; - Кинематика твердого тела
- В кинематике твердых тел решаются две основные задачи:
1) задание движения и определение кинематических характеристик тела в целом;
2) определение кинематических характеристик точек тела. - Поступательное движение твердого тела
Поступательное движение — это движение, при котором прямая, проведенная через две точки тела, остается параллельной ее первоначальному положению.
Теорема:при поступательном движении все точки тела движутся по одинаковым траекториям и имеют в каждой момент времени одинаковые по модулю и направлению скорости и ускорения.
Вывод:поступательное движение твердого тела определяется движением любой его точки, в связи с чем, задание и изучение его движения сводится к кинематике точки. - Вращательное движение твердого тела вокруг неподвижной оси
Вращательное движение твердого тела вокруг неподвижной оси — это движение твердого тела, при котором две точки, принадлежащие телу, остаются неподвижными в течение всего времени движения.
Положение тела определяется углом поворота. Единица измерения угла – радиан. (Радиан — центральный угол окружности, длина дуги которого равна радиусу, полный угол окружности содержит 2π радиана.)
Закон вращательного движения тела вокруг неподвижной оси.
Угловую скорость и угловое ускорение тела определим методом дифференцирования:— угловая скорость, рад/с; — угловое ускорение, рад/с².
Если рассечь тело плоскостью перпендикулярной оси, выбрать на оси вращения точку С и произвольную точку М, то точка М будет описывать вокруг точки С окружность радиуса R. За время dt происходит элементарный поворот на угол, при этом точка М совершит перемещение вдоль траектории на расстояние .
Модуль линейной скорости:.
Ускорение точки М при известной траектории определяется по его составляющим: ,
где.
В итоге, получаем формулы
тангенциальное ускорение:;
нормальное ускорение:.
 . Единица измерения угла – радиан. (Радиан — центральный угол окружности, длина дуги которого равна радиусу, полный угол окружности содержит 2π радиана.)
. Единица измерения угла – радиан. (Радиан — центральный угол окружности, длина дуги которого равна радиусу, полный угол окружности содержит 2π радиана.)  .
.  — угловая скорость, рад/с;
— угловая скорость, рад/с;  — угловое ускорение, рад/с².
— угловое ускорение, рад/с².  , при этом точка М совершит перемещение вдоль траектории на расстояние
, при этом точка М совершит перемещение вдоль траектории на расстояние  .
.  .
.  ,
,  .
.  ;
;  .
.- Плоско-параллельное движение твердого тела
- Плоско-параллельное движение твердого тела — это движение твердого тела, при котором все его точки перемещаются в плоскостях, параллельных одной неподвижной плоскости.
Движение сечения S в своей плоскости можно рассматривать как сложное, состоящее из двух элементарных движений:
1) поступательного и вращательного;
2) вращательного относительно подвижного (мгновенного) центра. - В первом варианте движение сечения может быть задано уравнениями движения одной его точки (полюса) и вращением сечения вокруг полюса.
В качестве полюса может быть принята любая точка сечения.
Уравнения движения запишутся в виде:.
Ускорение точки движущейся плоской фигуры складывается из ускорения полюса относительно неподвижной системы отсчета и ускорения за счет вращательного движения вокруг полюса. - Во втором варианте движение сечения рассматривается как вращательное вокруг подвижного (мгновенного) центра P.
В этом случае скорость любой точки В сечения будет определяться по формуле для вращательного движения:.
Угловая скорость вокруг мгновенного центра Р может быть определена если известна скорость какой либо точки сечения, например точки А.. - Положение мгновенного центра вращения может быть определено на основании следующих свойств:
1) вектор скорости точки перпендикулярен радиусу;
2) модуль скорости точки пропорционален расстоянию от точки до центра вращения ();
3) скорость в центре вращения равна нулю. - Теорема:проекции скоростей двух точек твердого тела на прямую, проведенную через эти точки, равны между собой и одинаково направлены.
Доказательство: расстояние АВ изменяться не может, следовательно,не может быть больше или меньше .
Вывод:.
 .
. 

 .
.  .
. );
);  не может быть больше или меньше
не может быть больше или меньше  .
.  .
.- Сложное движение точки
- Относительное движение — это движение точки относительно подвижной системы.
Переносное движение — это движение точки вместе с подвижной системой.
Абсолютное движение — это движение точки относительно неподвижной системы.
Соответственно называют скорости и ускорения:— относительные; — переносные; — абсолютные. - Абсолютная скорость точки равна векторной сумме относительной и переносной скоростей (согласно теореме о сложении скоростей): .
Абсолютное значение скорости определяется по теореме косинусов:. - Ускорение по правилу параллелограмма определяется только при поступательном переносном движении . .
- При непоступательном переносном движении появляется третья составляющая ускорения, называемое поворотным или кориолисовым. ,
где.
Кориолисово ускорение численно равно:,
где– угол между векторами и .
Направление вектора кориолисова ускорения удобно определять по правилу Н.Е. Жуковского: векторспроектировать на плоскость, перпендикулярную оси переносного вращения, проекцию повернуть на 90 градусов в сторону переносного вращения. Полученное направление будет соответствовать направлению кориолисова ускорения.
 — относительные;
— относительные;  — переносные;
— переносные;  — абсолютные.
— абсолютные. .
.  .
. .
.  .
. ,
,  .
.  ,
,  – угол между векторами
– угол между векторами  и
и  .
. Динамика
Динамика — это раздел теоретической механики, в котором изучаются механические движении материальных тел в зависимости от причин, их вызывающих.
- Основные понятия динамики

где mk, xk, yk, zk — масса и координаты k-той точки механической системы, m — масса системы.
В однородном поле тяжести положение центра масс совпадает с положением центра тяжести.
Момент инерции материальной точки относительно оси равен произведению массы точки на квадрат расстояния точки от оси:
 .
. Момент инерции системы (тела) относительно оси равен арифметической сумме моментов инерции всех точек:


 ,
, где
 — ускорение центра масс тела.
— ускорение центра масс тела. , равная произведению вектора силы
, равная произведению вектора силы  на бесконечно малый промежуток времени dt:
на бесконечно малый промежуток времени dt:  .
. Полный импульс силы за Δt равен интегралу от элементарных импульсов:
 .на бесконечно малое перемещение
.на бесконечно малое перемещение  .
. Скалярное произведение векторов равно произведению их модулей на косинус угла между направлениями векторов:
 ,
, где α — угол между направлениями векторов перемещения и силы.
на конечном перемещении точки её приложения равна интегралу от элементарной работы, взятому по перемещению:  .
. Единица измерения работы — Джоуль (1 Дж = 1 Н·м).
 , равная произведению массы m на её скорость
, равная произведению массы m на её скорость  :
:  .
. или
или  ,
, где m — масса механической системы,
 — вектор скорости центра масс системы.
— вектор скорости центра масс системы. .
. .
.- Аксиомы динамики
- Первая аксиома — это закон инерции.
Если на свободную материальную точку не действуют никакие силы или действует уравновешенная система сил, то точка будет находиться в состоянии покоя или равномерного прямолинейного движения. - Вторая аксиома — закон пропорциональности ускорения.
Ускорение, сообщаемое материальной точке действующей на неё силой, пропорционально этой силе и по направлению совпадает с направлением силы:— это основной закон динамики. - Третья аксиома — это закон противодействия.
Силы, с которыми действуют друг на друга две материальные точки, равны по модулю и направлены вдоль прямой, соединяющей эти точки, в противоположные стороны:. - Четвертая аксиома — закон независимости действия сил.
При действии на материальную точку системы сил полное ускорение этой точки равно геометрической сумме ускорений от действия каждой силы:
 — это основной закон динамики.
— это основной закон динамики. .
.
- Дифференциальные уравнения динамики
- Дифференциальные уравнения движения точки связывают ускорение точки с действующими на нее силами. Фактически дифференциальные уравнения являются записью основного закона динамики в явной дифференциальной форме.
Для абсолютного движения точки (движение в инерциальной системе отсчета) дифференциальное уравнение имеет вид:. - Векторное уравнение может быть записано в проекциях на оси прямоугольной инерциальной системы координат:
- При известной траектория движения точки уравнение может быть записано в проекциях на оси естественной системы координат:
С учетом того, что,
где— тангенциальное ускорение; — нормальное ускорение,
уравнения примут вид:
 .
.

 ,
,  — тангенциальное ускорение;
— тангенциальное ускорение;  — нормальное ускорение,
— нормальное ускорение, 
- Общие теоремы динамики
- Общие теоремы динамики устанавливают зависимость между мерами механического движения и механического взаимодействия. Выводы теорем являются результатом тождественного преобразования основного закона динамики.
- Теорема об изменении количества движения: изменение количества движения материальной точки (механической системы) за конечный промежуток времени равно сумме импульсов внешних сил за тот же промежуток времени — для материальной точки; — для механической системы.
- Теорема об изменении кинетической энергии: изменение кинетической энергии точки (механической системы) при её перемещении равно сумме работ всех действующих внешних сил на этом перемещении — для материальной точки; — для механической системы.
- Кинетическая энергия механической системы определяется в соответствии с , при этом для твердых тел выведены следующие зависимости: — при поступательном движении тела; — при вращательном движении тела; — при плоско-параллельном движении тела.
- Момент инерции цилиндра относительно его оси: .
- Момент инерции стержня относительно оси z: .
- Момент инерции прямоугольной пластины относительно осей х и y: .
- Момент инерции шара определяется по формуле: .
- Работа силы тяжести: ,
где P — сила тяжести;
h — изменение положения тела по вертикали. - Работа силы при вращательном движении тела ,
где M — момент силы,
w — угловая скорость тела.
Следует иметь в виду, что работа, как скалярная величина, может быть положительной или отрицательной. Работа будет положительной если направление действия силы совпадает с направлением движения.
 — для материальной точки;
— для материальной точки;  — для механической системы.
— для механической системы. — для материальной точки;
— для материальной точки;  — для механической системы.
— для механической системы. — при поступательном движении тела;
— при поступательном движении тела;  — при вращательном движении тела;
— при вращательном движении тела;  — при плоско-параллельном движении тела.
— при плоско-параллельном движении тела. .
. .
. .
. .
. ,
, - Принцип Даламбера
- Формулировка принципа Даламбера: если в любой момент времени к действующим на точку силам присоединить силы инерции, то полученная система сил будет уравновешенной: .
- Для механической системы: .
 .
. .
.Примеры решения задач
Решение примеров по теме: «Статика твердого тела»
Пример 1. Условия равновесия
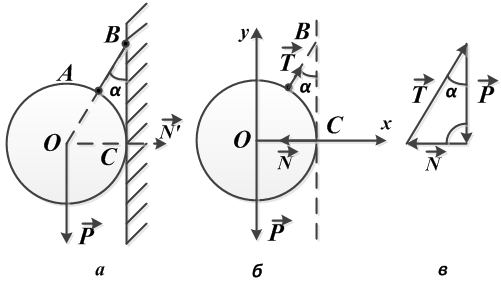
Висящий на нити, под углом в сорок пять градусов к гладкой стене шар весом в десять Ньютон, находится в состоянии равновесия (рис. а). Необходимо определить давление однородного шара на гладкую стенку и натяжение нити.
Дано: P = 10 Н; α = 45°
Найти: N, T — ?
Решение.
Отбрасываем связи, а их действие на шар заменяем реакциями.
Реакция стенки N направлена перпендикулярно стенке (от точки касания С к центру шара О), реакция нити Т — вдоль нити от точки А к точке В.
Тем самым выявляется полная система сил, приложенных к покоящемуся шару.
Это система сил, сходящихся в центре О шара, и состоящая из веса шара Р (активная сила), реакции стенки N и реакции нити Т (рис. б).
Реакции N и Т по величине неизвестны. Для их определения следует воспользоваться условиями равновесия (в той или иной форме — геометрической, аналитической).
При геометрическом способе решения строится замкнутый многоугольник сил и используются соотношения школьной геометрии (теорема синусов, теорема косинусов, теорема Пифагора и т.д.).
В данном случае это замкнутый силовой треугольник (рис. в), из которого получаем:

После подстановки в формулы числовых значений, получим:  .
.
Ответ:  .
.
Решение примеров по теме: «Кинематика»
Пример 2. Уравнение траектории точки
Дано:
Движение точки задано уравнениями  ;
;
(x, у — в сантиметрах, t — в секундах).
Найти: уравнение траектории точки в координатной форме.
Решение. Для определения уравнения траектории из уравнений движения исключаем время t. Для этого из первого уравнения выражаем  и подставляем это значение во второе уравнение, преобразованное к функциям одинарного угла:
и подставляем это значение во второе уравнение, преобразованное к функциям одинарного угла:  .
.
Опуская промежуточные выражения, получаем уравнение траектории:  .
.
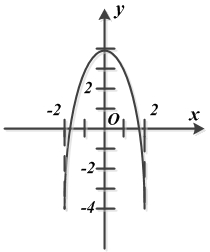 Уравнение определяет параболу, расположенную симметрично относительно оси у, с вершиной в точке (0, 4). Траекторией служит кусок этой параболы, заключенный между точками с координатами (-2, -4) и (2, -4).
Уравнение определяет параболу, расположенную симметрично относительно оси у, с вершиной в точке (0, 4). Траекторией служит кусок этой параболы, заключенный между точками с координатами (-2, -4) и (2, -4).
Ответ: .
Решение примеров по теме: «Динамика»
Пример 3. Основной закон динамики точки
Свободная материальная точка, масса которой десять килограмм, движется прямолинейно с ускорением пол метра в секунду в квадрате. Определить силу, приложенную к точке.
Дано: m = 10 кг; a = 0,5 м/с 2 .
Найти: F — ?
Решение.
Согласно основному закону динамики:  .
.
Подставив значения в формулу, получим: 
Ответ: сила, сообщающая массе, равной 10 кг,
ускорение 0,5 м/с 2 , равна 5 Н.
В помощь студенту
- Формулы, правила, законы, теоремы, уравнения, примеры решения задач
Список литературы:
Бать М.И., Джанелидзе Г.Ю., Кельзон А.С. Теоретическая механика в примерах и задачах.
Буторин Л.В., Бусыгина Е.Б. Теоретическая механика. Учебно-практическое пособие.
http://www.sites.google.com/site/tehmehprimizt/lekcii/teoreticeskaa-mehanika/dinamika/aksiomy-dinamiki
http://electrichelp.ru/teoreticheskaya-mexanika-v-pomoshh-studentu/