Законы регулирования
Закон регулирования — это зависимость перемещения регулирующего органа от отклонения регулируемой переменной. Качество регулирования обеспечивается выбором закона регулирования. Наибольшее распространение получили следующие пять основных законов регулирования: двухпозиционный, пропорциональный, интегральный, дифференциальный и пропорционально-интегрально-дифференциальный (ПИД).
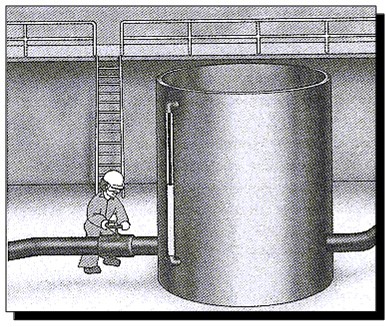 Система ручного регулирования уровня
Система ручного регулирования уровня
Двухпозиционный закон регулирования — это «Двухпозиционное регулирование», которое называют еще «Старт-стопное регулирование». Чтобы моделировать двухпозиционный режим регулирования, оператор на рисунке выше устанавливал бы регулирующий клапан в одно из двух крайних положений: или полностью открыт, или полностью закрыт, то есть «включено» или «выключено». Так, например, если уровень будет низким, оператор откроет клапан полностью, чтобы вода могла наполнить резервуар. Затем, как только вода достигнет желаемого уровня, оператор полностью закроет клапан, чтобы прекратить приток воды в резервуар.
Чтобы моделировать пропорциональный закон регулирования, оператор непрерывно устанавливал бы регулирующий клапан в положение, отвечающее произошедшему на данный момент изменению уровня. Так, например, если уровень понизился немного, оператор откроет клапан немного; если уровень понизился еще больше, оператор увеличит степень открытия клапана. Наоборот, если уровень несколько повысится, оператор уменьшит степень открытия клапана на соответствующую величину. Таким образом, моделируя пропорциональное регулирование, оператор непрерывно в соответствии с изменением уровня изменяет положение клапана. Регулирование уровня при этом будет выполняться более эффективно, чем при простом открытии и закрытии клапана. Когда изменения уровня прекращаются, оператор прекращает позиционирование клапана.
Так как при пропорциональном регулировании выходной корректирующий сигнал вырабатывается на изменения регулируемой переменной процесса, пропорциональный регулятор не дает выходного управляющего сигнала, если регулируемая переменная процесса не изменяется. Например, когда уровень в резервуаре изменяется, оператор открывает или закрывает клапан пропорционально этим изменениям. Когда изменения уровня прекращаются, оператор останавливает позиционирование клапана. При этом уровень установится на некоторой отметке, но это может не быть заданное значение уровня. Это означает, что при пропорциональном регулировании может быть смещение регулируемой переменной процесса или ошибка регулирования. В определенных системах это вполне приемлемо. Если же смещение регулируемой переменной не допускается, надо применить другой закон регулирования: интегральный, при котором обеспечивается возвращение регулируемой переменной к уставке.
Чтобы моделировать закон интегрального регулирования, оператор продолжает открывать или закрывать клапан так долго пока уровень отклоняется от уставки в независимости от того происходят ли при этом произвольные изменения уровня или не происходят. Так, например, если уровень немного понизился, оператор приоткроет клапан немного. Затем, даже если уровень перестал изменяться, оператор продолжит открывать клапан пока уровень не возвратится к заданному значению (уставке).
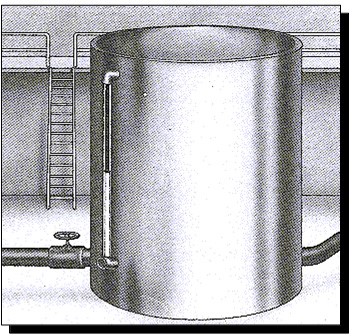 Система регулирования уровня с большой емкостью
Система регулирования уровня с большой емкостью
Рисунок выше иллюстрирует процесс, который может требовать применения другого закона регулирования. Этот процесс — тот же самый процесс поддержания уровня из первого примера, отличающийся лишь тем, что емкость резервуара много больше, в то время как питательная труба остается той же самой. Это означает, что, когда оператор открывает или закрывает клапан как прежде, оказывается меньшее непосредственное влияние на уровень в резервуаре. При увеличения уровня, пропорциональное регулирование могло бы отработать воздействия, направленные на снижение уровня, но действие не было бы достаточно быстрым, чтобы поддерживать уровень внутри желательных ограничений.
Закон дифференциального регулирования используется, чтобы предотвратить чрезмерное отклонение регулируемой переменной от уставки, вырабатывая корректирующее воздействие пропорциональное скорости отклонения. Так, моделируя дифференциальный закон регулирования, оператор изменяет степень открытия регулирующего клапана в соответствии со скоростью возрастания отклонения уровня от уставки. Например, если уровень начал понижаться, оператор быстро увеличит степень открытия приточного клапана (при чем эти изменения положения клапана большие, чем при чисто пропорциональном законе регулирования), чтобы замедлить скорость изменения уровня и, в конечном счете, стабилизировать уровень. Если уровень начал быстро понижаться, оператор должен быстро и значительно открыть клапан, чтобы замедлить скорость падения уровня и потом его стабилизировать.
Последним мы рассмотрим пропорционально-интегрально-дифференциальный закон регулирования. Чтобы воспроизвести этот закон регулирования, оператор изменяет положение регулирующего клапана в зависимости от величины отклонения, скорости изменения и продолжительности рассогласования. Другими словами, оператор в этом случае объединяет пропорциональный, интегральный и дифференциальный законы регулирования.
Законы автоматического регулирования

Законы автоматического регулирования
Может оказаться, что одни автоматические системы хорошие, а другие плохие, то казалось бы всегда нужно использовать только самые хорошие, а о других — плохих не следовало бы даже. и говорить. Сначала необходимо разобраться с тем, что считать хорошие, а что плохие автоматические системы. Вообще-то хороший автоматический регулятор это такой, который обеспечивает получение достаточно хороших характеристик процесса автоматического регулирования и вместе с тем прост по своей конструкции. Нужно иметь в виду и то, что различные объекты регулирования имеют неодинаковые характеристики, и поэтому автоматический регулятор, обеспечивающий удовлетворительную работу одного из них, может быть непригодным для другого. Это тоже необходимо учитываться при выборе типа системы автоматического регулирования. Поэтому в различных случаях можно считать лучшими различные автоматические системы. В некоторых случаях можно обойтись простейшими, а в других — требуются более сложные системы автоматического регулирования.
Задачей автоматической системы, как уже отмечалось, является поддержание заданного значения регулируемой величины у(t) или изменение ее по определенному закону, который заранее задается или в зависимости от изменения внешних условий.
Программы могут быть функциями времени у = у(t) или параметрическими у = у(s1 , s2 , . . . t).
Примером временной программы может служить программа изменения регулируемой величины, обеспечивающая заданный режим начального разгона объекта регулирования при пуске до наступления режима нормальной эксплуатации. Например, регулятор частоты вращения коленчатого вала дизеля тепловоза. Во всех подобных устройствах в составе автоматического регулятора или автоматической системы имеется программное устройство, в которое заранее заложена требуемая временная программа.


Примером параметрической программы автоматического регулирования может служить задание требуемого значения скорости движения локомотива с поездом не во времени, а в зависимости от пройденного пути, чтобы прибыть в заданное время на данную станцию.
Большинство известных систем автоматического регулирования работают по принципу отклонения. Это значит, что она вступает в действие после того, как произошло отклонение регулируемой величины от заданного значения, как говорят, при наличии рассогласования Dx(t)между заданным x(t) и фактическим y(t) значением регулируемой величины.
Для наиболее часто применяемых систем автоматического регулирования иногда используются названия, отражающие их особенности, связанные со способом формирования в автоматической системе управляющих воздействий, которые передаются исполнительному устройству.
Пусть Dx(t), представляет отклонение регулируемой величины y(t) от заданного значения x(t), аh(t) воздействие со стороны автоматической системы на объект регулирования. Величина Dx(t)может изменяться в зависимости от времени по-разному.
Законом регулирования называется математическое выражение, описывающее зависимость между входом автоматического регулятора Dx(t) = x(t) — xoc(t) и его выходомy(t).
Различают линейные и нелинейные законы регулирования.
Все законы автоматического регулирования можно разделить на:
1. Простейшие:
— пропорциональный;
— интегральный;
— дифференциальный;
2. Промышленные:
— пропорционально-интегральный;
— пропорционально-дифференциальный;
— пропорционально-интегрально-дифференциальный.
Для линейных законов автоматического регулирования детально разработаны многочисленные прикладные методы исследования, анализа и синтеза, различные расчетные и экспериментальные приемы определения устойчивости, точности и качества работы, а также схемы технических устройств их формирования и реализации.
Пропорциональный закон. Чаще всего такой функциональной зависимостью является простая пропорциональная зависимость, при которой регулируемая величина y(t) должна воспроизводить обычно на более высоком уровне мощности изменения заданной величины x(t) или рассогласования Dx(t).

Если считать, что h(t)изменяется пропорциональноDx(t), то такой регулятор называютпропорциональнымили П-регулятором. Выражение пропорциональной зависимости между величинами h(t) и Dx(t) имеет следующий видh(t) = k Dx(t), где k — коэффициент усиления регулятора.
Пропорциональным автоматическим регулятором может служить обычное усилительное звено с изменяемым коэффициентом усиления, включенное в отрицательную обратную связь по отношению к объекту регулирования.
Проследим за тем, что происходит с исполнительным органом, когда регулируемая величина y(t)скачком изменяется на Dy и принимает значение y + Dy. В простейшем регуляторе, работающем по принципу отклонения, в процессе регулирования величина h(t) тем больше, чем больше отклонение Dx(t).
Принцип работы пропорционального регулятора
Как можно заключить из приведенной формулы, что нормальное функционирование данного регулятора возможно только в случае, когда Dx(t) > 0. Таким образом, автоматическая система имеет постоянную (статическую) ошибку, которую называют статизмом регулятора, а системаавтоматического регулирования называется статической системой.
Автоматическая система называется статической, если при любом постоянном задающем воздействии установившаяся ошибка поддержания регулируемой величины не равна нулю и зависит от величины этого воздействия.
Статизм выражается в процентах и определяется по формуле:


В статической по отношению к управляющему воздействию автоматической системе при воздействии, стремящемся с течением времени к некоторому значению, ошибка также стремится к постоянному значению, зависящему от значения управляющего воздействия, т. е. статическая автоматическая система не может обеспечить постоянства регулируемой величины при переменной во времени нагрузке.
Говоря о статической ошибке регулирования, считают, что после каждого изменения внешнего возмущения или отклонения от заданного режима работы, которое вызывается другими причинами, снова устанавливается постоянное значение регулируемой величины, пусть не то, что было раньше, но постоянное, и остается дальше неизменным.
Статическая автоматическая система имеет нулевой порядок астатизма. Это означает, что в прямой цепи автоматического регулирования нет интегрирующих звеньев. Она может содержать только статические звенья: усилительные, форсирующие или колебательные.
Для повышения точности поддержания заданного значения регулируемой величины, как следует из приведенного уравнения, увеличивают коэффициент усиления k. Однако при этом может возрасти динамическая погрешность, так как даже малое изменение регулируемой величины приводит к значительному изменению управляющего воздействия h(t), что может неблагоприятно сказаться на характеристиках переходных процессов, вызывая дополнительные колебания регулируемой величины.

Интегральный закон. С тем, чтобы исключить указанный недостаток систем автоматического регулирования прямого действия, были созданы автоматические системы непрямого действия, в которых между чувствительным элементом и исполнительным органом включается дополнительное звено (в большинстве случаев выполняющее операцию интегрирования погрешности регулирования Dx(t), работающее с независимым источником энергии). Это может быть гидравлический или пневматический сервомотор, электродвигатель постоянного или переменного тока и т. п. В интегральных регуляторах (И-регуляторах) управляющее воздействие формируется по следующему закону

Интегральным регулятором может служить интегрирующее звено с переменным передаточным коэффициентом в обратной связи.
Принцип работы интегрального регулятора
Переходный процесс в автоматической системе с И-регулятором характеризуется отсутствием статической ошибки регулирования и наибольшим значением отклонения регулируемой величины от установившегося значения по сравнению с другими законами регулирования. И-регуляторы в практике автоматического регулирования не применяются, т. к. они обладают плохими динамическими качествами и в большинстве случаев способствуют возникновению в автоматической системе незатухающих колебаний.

Пропорционально-интегральный закон. Инженеры и ученые давно поняли, что статическая автоматическая система не может быть абсолютно точной, если иметь в виду сведение к нулю статической ошибки, а интегральные регуляторы способствуют возникновению колебательных режимов. Тогда начались поиски способов улучшения работы автоматических систем. Было замечено, что отрицательное влияние на динамические свойства автоматической системы оказывают инерционные элементы, особенно в регуляторах прямого действия.
В процессе регулирования пропорционально-интегральной автоматической системы (ПИ-регуляторы) осуществляется два действия: одно, характерное для П-регулятора, следовательно, можно говорить о П-составляющей процесса регулирования, и второе, осуществляющееинтегрирование величины рассогласования Dx(t) интегральная составляющая.
В ПИ-регуляторах регулирующее воздействие формируется по следующему закону.

Пропорционально-интегральный закон регулирования представляет собой параллельное соединение пропорциональной и интегральной составляющих.
Пропорционально-интегральный регулятор сочетает в себе достоинства пропорциональных и интегральных законов автоматического регулирования, а именно: пропорциональная составляющая обеспечивает достаточное быстродействие регулятора, а интегральная составляющая ликвидирует статическую ошибку регулирования.
В начале процесса автоматического регулирования основную роль играет пропорциональная составляющая, так как интегральная составляющая зависит не только от абсолютного значения рассогласования между заданным и фактическим значением регулируемой величины, но и от времени. С увеличением времени возрастает роль интегральной составляющей, обеспечивающей устранение статической ошибки.
Подбором коэффициентов k1 и k2 можно изменять удельный вес каждой составляющей.
При использовании такой автоматической системы полностью устраняется статическая погрешность регулирования. Автоматическая система является астатической, в которой Dx(t) = 0.
Автоматическая система называется астатической, если при любом постоянном задающем или возмущающем воздействии установившаяся ошибка поддержания регулируемой величины равна нулю и не зависит от величины этого воздействия.
Астатические системы могут быть первого, второго и более высокого порядка астатизма.
Астатическая система первого порядка не имеет ошибки по положению, однако имеют постоянную ошибку по скорости и возрастающую ошибку по ускорению.
Астатическая система второго порядка не имеет ошибок по положению и по скорости, однако имеют постоянную ошибку по ускорению.
Автоматическая система будет астатической по отношению к управляемому воздействию, если при внешнем воздействии, стремящемуся к установившемуся значению, ошибка стремится к нулю независимо от значения внешнего воздействия. Статические системы обычно имеют менее сложное конструктивное решение, чем астатические. Они обладают погрешностью в поддержании постоянства значения регулируемой величины при разных внешних нагрузках. Изменение регулируемой величины, которое вызывает у статической системы перемещение управляемого органа из одного предельного положения в другое, является важнейшей характеристикой статической системы и называется его неравномерностью. Отношение этой неравномерности к номинальному значению регулируемой величины называют степенью неравномерности (коэффициентом статизма или статизмом).
Если иметь в виду отсутствие статической погрешности регулирования, то такая автоматическая система является абсолютно точной. Но, как показал опыт, при такой схеме построения автоматической системы трудно получить удовлетворительные динамические качестварегулирования. Это обусловлено тем, что к положению нового равновесного состояния рассогласование Dx(t) должно приближаться с нулевой скоростью. Иначе в автоматической системе возникают незатухающие колебания регулируемой величины. В общем возможности применения таких автоматических систем весьма ограничены.
В любом автоматическом регуляторе имеется внутренняя обратная связь, благодаря которой золотник принудительно возвращается в положение перекрыши, т. е. в равновесное состояние. Такой регулятор обеспечивает хорошие динамические свойства, но при его использовании возникает статическая ошибка регулирования.
Астатическая система первого порядка имеет один интегратор в прямой цепи регулирования. После завершения переходного процесса точность регулирования обеспечивается благодаря свойствам интегратора как запоминающего устройства (память идеального интегратора бесконечна).
Введение в автоматическую систему двух интегрирующих звеньев позволяет получить управление по ускорению. Система с астатизмом второго порядка благодаря свойством интеграторов точно воспроизводит и установившемся процессе постоянные и линейно возрастающие воздействия. Воздействие, изменяющееся с постоянным ускорением, автоматическая система воспроизводит (копирует) с постоянной динамической ошибкой, называемой ошибкой по ускорению.
Таким образом, порядок астатизма по отношению к задающему воздействию легко определить непосредственно по функциональной схеме автоматической системы. Для этого автоматическую систему путем структурных преобразований следует привести к одноконтурной и определить количество интегрирующих звеньев между входом и выходом.

Пропорционально-интегрально-дифференциальный закон. Положительные качества всех рассмотренных автоматических систем объединяет пропорционально-интегрально-дифференциальный закон регулирования или ПИД-регуляторы. Мысль инженеров работала над тем, как устранить отмеченные выше недостатки, или если их полностью устранить нельзя, то хотя бы уменьшить их вредное влияние на процесс регулирования. Было решено использовать воздействия по производной сигнала рассогласования.
ПИД-регулятор сочетает в себе достоинства всех простейших законов автоматического регулирования:
— высокое быстродействие благодаря наличию пропорциональной составляющей;
— высокую точность благодаря интегральной составляющей;
— малое время переходного процесса благодаря дифференциальной составляющей.
Иногда говорят, что такие регуляторы работают с предварением, т. е. он вступает в действие тогда, когда еще отклонение не произошло.
Благодаря воздействию по производной осуществляется предварение формирования управляющего воздействия, а благодаря сигналу по интегралу снимается статическая погрешность регулирования.
В этом случае управляющее воздействие формируется согласно закону

На установившихся режимах работы всегда, как бы ни изменялись возмущения, регулируемая величина остается неизменной. Этот регулятор в начале переходного процесса, вызванном изменением нагрузки, работает как ПИ-регулятор, что является благоприятным для динамических свойств системы, а затем в ходе переходного процесса, действие обратной связи ослабевает, что позволяет работать без статической погрешности. Такая обратная связь называется гибкой обратной связью.
Принцип работы пропорционально-интегрально-дифференциального регулятора
Необходимо отметить, что применение автоматических регуляторов с дифференциальными составляющими, несмотря на их достоинства, не всегда целесообразно, а иногда и недопустимо. Так, для объектов с большим запаздыванием по каналу регулирования бесполезно вводить воздействие по производной от регулируемой величины, так как этот сигнал будет поступать в автоматический регулятор по истечении времени запаздывания после прихода возмущения, за которые в объекте регулирования могут накопиться большие отклонения. В таких случаях ПИД-регулятор может привести к неустойчивости автоматической системы
Использование нелинейных законов автоматического регулирования, определяемых разнообразными нелинейными уравнениями состояния значительно расширяет возможности целесообразного изменения качества процессов автоматического регулирования и точности работы автоматических систем. Это должно быть ясно из общих принципиальных соображений, так как область нелинейных уравнений значительно богаче и разнообразнее, чем линейных.
Несмотря на то, что общей теории нелинейных законов автоматического регулирования нет, исследования и опыт применения отдельных частных видов этих законов говорят об их большой практической эффективности.
Важным отличием нелинейных законов автоматического регулирования от линейных является то, что они придают автоматической системе принципиально новые свойства. Если при линейном законе автоматического регулирования всегда вырабатывается сигнал, пропорциональный входной переменной или ее производной, то при нелинейном законе может существенно изменяться сам характер действия автоматической системы на объект регулирования в зависимости от величины входного воздействия. Другими словами, если для линейных автоматических систем изменение размера отклонения Dx(t) — это изменение только масштаба, но не формы процессов, то в нелинейной автоматической системе при этом может существенно изменяться и форма процессов, вплоть до принципиальных качественных изменений картины происходящих процессов. Эти особые свойства нелинейных законов можно выгодно использовать в технике автоматического регулирования.
Нелинейные законы автоматического регулирования разделяют на:
— функциональные нелинейные законы автоматического регулирования;
— логические нелинейные законы автоматического регулирования;
— оптимизирующие нелинейные законы автоматического регулирования;
— параметрические нелинейные законы автоматического регулирования.
Рассмотрим отдельно каждый из указанных нелинейных законов автоматического регулирования.
Функциональные нелинейные законы автоматического регулирования предполагают изменение управляющего воздействия h(t) на объект регулирования, выражающегося в виде нелинейной функции от отклонения регулируемой величины Dx(t). Данный класс автоматических систем может содержать в себе как статические, так и динамические нелинейности

Нелинейный закон автоматического регулирования может включать нелинейности от выходной величины у(t). Подобные динамические члены нелинейного закона автоматического регулирования различно влияют на демпфирующие свойства автоматической системы в переходных режимах в зависимости от скорости отклонения регулируемой величины Dx(t). Они могут существенно улучшить динамическую точность автоматической системы в различных режимах вынужденного движения, воспроизведения различных форм задаваемых входных сигналов. а также при случайных воздействиях.
Отметим также, что функциональные нелинейные законы автоматического регулирования могут быть связаны не только с изменением параметров в зависимости от размеров входных воздействий, но и с изменением структуры автоматической системы.

Логические нелинейные законы автоматического регулирования реализуются с помощью не функциональных, а более сложных логических устройств. Построение простейшего логического нелинейного закона автоматического регулирования может сводиться к выбору того или иного способа обработки сигнала рассогласования Dx(t) в зависимости от поставленных перед автоматической системой задач и требуемого качества регулирования.
Логические нелинейные законы автоматического регулирования могут быть связаны также с изменением структуры автоматической системы. Например, при помощи логического устройства можно включать и выключать сигналы управления по первой и второй производными или интегралу, в зависимости от сочетания значений отклонения сигнала рассогласования Dx(t).
В общем случае срабатывание переключающего устройства в автоматической системе с переменной структурой может происходить от нескольких входных величин. При этом кроме основной нелинейности, возникающей за счет переключения структуры, дополнительно могут иметься какие-либо нелинейные свойства в отдельных других звеньях автоматического регулятора или объекта регулирования.
Оптимизирующие нелинейные законы автоматического регулирования основаны на использовании классических вариационных методов или на их основе принципа максимума, или методов динамического программирования таким образом, чтобы автоматическая система имела максимум быстродействия или минимум ошибки, или же экстремум другой величины с учетом ограничений, накладываемых в реальной автоматической системе на отдельные координаты.
Как правило, при этом приходят к нелинейным законам автоматического регулирования, хотя можно оптимизировать коэффициенты линейного закона. Часто оптимальный закон автоматического регулирования состоит в переключении управляющего воздействия h(t) с одного максимально возможного значения на другое. Моменты переключения определяются сложными комбинациями значений нескольких переменных и их производных.
Параметрические нелинейные законы автоматического регулирования формируют управляющее воздействие в виде нелинейной функции текущих координат, в которых задается параметрическая программа.
Правовое регулирование
Правовое регулирование – осуществляемое при помощи системы правовых средств воздействие на общественные отношения.
Для того чтобы общество было организованным и упорядоченным, необходимо осуществлять определенное согласование разнообразных интересов как отдельного человека так и сообщества людей. Это осуществляется посредством социального регулирования, то есть целенаправленного воздействия на поведение людей. Регулирование может быть внутренним (саморегулирование) и внешним (со стороны кого — либо).
В системе социального регулирования важная роль принадлежит именно правовому регулированию. Регулированием можно назвать только такое воздействие, при котором ставятся достаточно ясно обозначенные цели.
Воздействие норм, в результате которого реализуются поставленные цели, можно назвать правовыми. Если под воздействием законодательного акта или его норм наступают последствия, не предусмотренные законодательством, а иногда противоречащие целям законодателя, такое воздействие не может считаться правовым регулированием. Также нельзя считать правовым регулированием воздействие, осуществляемое неюридическими средствами. Например, воздействие на сознание людей через средства массовой информации, нравственное и правовое просвещение.
Предмет правового регулирования
Право не должно и не может регулировать все общественные отношения и все социальные связи людей. Поэтому должна быть достаточно точно определена сфера правового регулирования, то есть те связи, которые необходимо урегулировать правом.
В сферу правового регулирования должны входить отношения со следующими признаками:
— в них находят отражение как индивидуальные интересы членов общества, так и интересы общесоциальные;
— в них реализуются взаимные интересы их участников, каждый из которых идет на какое-то ущемление своих интересов ради удовлетворения другого;
— они строятся на основе согласия выполнять определенные правила, признания обязательности этих правил;
— они требуют соблюдения правил, обязательность которых подкреплена достаточно действенной силой
Этим признакам отвечают три группы общественных: отношений:
1) отношения людей по обмену материальными и духовными ценностями (имущественные);
2) отношения по властному управлению обществом (государственное управление социальными процессами);
3) отношения по обеспечению правопорядка (призваны обеспечить нормальное протекание процессов обмена ценностями и процессов управления в обществе). Эти отношения возникают из нарушения правил поведения людей в двух указанных сферах.
Общественные отношения, входящие в эти группы составляют предмет правового регулирования, поскольку по своей природе могут поддаваться нормативно-организационному воздействию и требуют правового регламентирования.
От характера и содержания общественных отношений зависят особенности, характер, способы и средства правового регулирования.
Такой характер и вид общественных отношений обусловливают степень интенсивности правового регулирования (широта охвата правовым воздействием, степень обязательности правовых предписаний, формы и методы правового принуждения, степень детализированности предписаний, напряженность правового воздействия на общественные отношения).
Методы, способы и типы правового регулирования
Разнообразие общественных отношений, входящих в сферу правового регулирования, порождает различия в методах и способах юридического воздействия. В теории правового регулирования принято выделять два метода правового воздействия.
Метод децентрализованного регулирования (автономный, диспозитивный) – построен на координации целей и интересов сторон в общественном отношении субъектов гражданского общества, удовлетворяющих свои частные интересы (в сфере отраслей частноправового характера).
Метод централизованного (императивного, авторитарного) регулирования – базируется на отношениях субординации между участниками общественного отношения. В этих отношениях приоритетным является общественный интерес. Централизованные, императивные методы используются в публично-правовых отраслях (в конституционном, административном, уголовном праве).
Метод правового регулирования является одним из важных критерия разграничения прав на отрасли.
Способы правового регулирования определяются характером предписания, зафиксированного в норме права, способами воздействия на поведение людей. В теории права принято выделять три основных способа правового регулирования.
1. Дозволение – состоит в предоставлении субъектам прав на совершение определенных положительных действий (предоставление субъективных прав).
Дозволение связано с предоставлением субъектам возможности совершать определенные действия в собственных интересах (например, работник предприятия имеет право на достойное вознаграждение за свой труд). Дозволения весьма не однородны. Они могут выражаться в таких формах, как субъективное право, свобода, законный интерес. Каждая из названных форм имеет собственную природу и обладает соответствующей степенью гарантированности.
2. Обязывание – заключается в возложении обязанности совершить определенные положительные действия (обязанность платить налоги).
Обязывание связано с возложением на лиц необходимости совершить активные указанные в законе либо в договоре действия (например, должнику необходимо исполнить свои обязанности перед кредитором). Обязывание как способ правового регулирования ориентируется на интересы управомоченного субъекта и представляет собой специфический приказ, долг совершать определенные действия.
3. Запрет – сводится к возложению обязанности воздерживаться от определенных действий.
Запрещение связано с необходимостью воздержания от конкретных действий, с пассивным поведением (например, работники правоохранительных органов не имеют права применять недозволенные методы расследования). Запрещение есть разновидность обязывания, представляющее собой определенное долженствование.
Второй и третий способы имеют определенное сходство. Оба предполагают возложение обязанностей, но если в одном случае обязанности носят позитивный характер, то в другом – пассивный. Кроме того, можно выделить дополнительные способы правового воздействия. Это:
— поощрение— выражается в награждении субъектов за определенные заслуги;
— рекомендации – состоят в предложении избрать наиболее целесообразный (оптимальный вариант поведения).
Также к дополнительным способам относятся применение мер принуждения (например, возложение юридической ответственности за правонарушение). К дополнительным способам можно отнести предупредительное (превентивное) воздействие норм, предусматривающих возможность правового применения правового принуждения.
В юридической литературе и в практике существуют две юридические формулы (принципа), на основе которых выделяются два типа правового регулирования.
Общедозволительный тип – выражается в принципе: разрешено все, что прямо не запрещено законом. По этому типу в регулируемых правом отношениях устанавливаются строго и четко сформулированные запреты. Как правило, объем этих запретов невелик.
Общедозволительный тип правового регулирования связан с закреплением в праве социальной свободы, с правом человека на выбор средств и способов достижения поставленных целей.
Общедозволительный тип правового регулирования основывается на общем дозволении, из которого путем запрещения делается исключение.
Его формула: дозволено все, кроме того, что прямо запрещено. Например, субъектам дозволено совершать различные виды сделок, однако совершение некоторых сделок любому субъекту запрещено (например, купля – продажа наркотиков).
Данный тип правового регулирования способствует (или хотя бы препятствует) проявлениям инициативности, активности, самостоятельности в решении тех или иных задач. Однако подобный тип правового регулирования не применим к деятельности государственных органов, ибо это создало бы возможности для различного рода злоупотреблений.
Общедозволительный тип правового регулирования связан с закреплением в праве социальной свободы, с правом субъекта на выбор средств способов достижения поставленных целей.
Разрешительный тип – выражается в принципе: запрещено все, что прямо не разрешено законом. Участники правовых отношений подобного типа может совершить только действия, которые прямо разрешены законом, а все остальные действия запрещены.
Разрешиетльный тип правового регулирования вытекает из необходимости в высокой и строгой упорядоченности социальных связей, последовательной реализации принципов законности. Он является единственным при применении мер государственного принуждения.
Разрешительный тип правового регулирования основывается на общем запрещении какого-либо вида действия, однако в индивидуальном порядке запрещенное поведение запрещается.
Его формула звучит следующим образом: запрещено все, кроме прямо разрешенного. Это означает, что участник правовых отношений подобного типа может совершать только действия, которые прямо разрешены законом, а все остальные действия запрещены.
Здесь в законе указывается точный, строго ограниченный объем правомочий: все, что выходит за пределы компетенции властвующего субъекта, категорически запрещено.
http://pandia.ru/text/78/172/74444.php
http://www.magnitogorsk.ru/content/imushchestvo-i-gradostroitelstvo/komitet-po-upravleniyu-imushchestvom-i-zemelnymi-otnosheniyami/informatsiya-10/pravovoe-regulirovanie