Калькулятор Обыкновенных Дифференциальных Уравнений (ОДУ) и Систем (СОДУ)
Порядок производной указывается штрихами — y»’ или числом после одного штриха — y’5
Ввод распознает различные синонимы функций, как asin , arsin , arcsin
Знак умножения и скобки расставляются дополнительно — запись 2sinx сходна 2*sin(x)
Список математических функций и констант :
• ln(x) — натуральный логарифм
• sh(x) — гиперболический синус
• ch(x) — гиперболический косинус
• th(x) — гиперболический тангенс
• cth(x) — гиперболический котангенс
• sch(x) — гиперболический секанс
• csch(x) — гиперболический косеканс
• arsh(x) — обратный гиперболический синус
• arch(x) — обратный гиперболический косинус
• arth(x) — обратный гиперболический тангенс
• arcth(x) — обратный гиперболический котангенс
• arsch(x) — обратный гиперболический секанс
• arcsch(x) — обратный гиперболический косеканс
Формы записи дифференциальных уравнений
Стационарные линейные непрерывные САУ наиболее часто описываются линейными дифференциальными уравнениями с постоянными коэффициентами:

 . (2.9)
. (2.9)
В этом уравнении  — выходная переменная (управляемая (регулируемая) величина) САУ,
— выходная переменная (управляемая (регулируемая) величина) САУ,  — входная переменная САУ. Правая часть уравнения (3.1) записана относительно управляющего воздействия
— входная переменная САУ. Правая часть уравнения (3.1) записана относительно управляющего воздействия  , однако используются формы записи уравнения относительно задающего воздействия
, однако используются формы записи уравнения относительно задающего воздействия  , возмущения
, возмущения  или нескольких входных воздействий.
или нескольких входных воздействий.
Применяется также операторная форма записи уравнения (2.9):

 . (2.10)
. (2.10)
В этом уравнении через «  » обозначен оператор дифференцирования
» обозначен оператор дифференцирования  .
.
Заметим, что по сложившейся традиции символ « » используется также в преобразованиях Лапласа и Карсона-Хевисайда, но является комплексным числом  .
.
За многолетнюю историю развития ТАУ сложились традиции формальной записи линейных дифференциальных уравнений, описывающих стационарные САУ. В учебной литературе по ТАУ они рассматриваются как стандартные формы записи дифференциальных уравнений. Рассмотрим эти формы записи на примере линейной системы второго порядка:

 (2.11)
(2.11)
или в операторной форме

 . (2.12)
. (2.12)
Первая стандартная символическая форма записи уравнения (2.11) имеет следующий вид:
 , (2.13)
, (2.13)
где  ;
;  ;
;  ;
;  .
.
Форма (2.13) представляет собой операторно-структурное описание системы, т.е. в виде операторов звеньев, составляющих структурную схему системы (далее эти понятия разъясняются), и связей между ними. В этой форме  — постоянные времени звена, измеряемые в секундах;
— постоянные времени звена, измеряемые в секундах;  — передаточный коэффициент звена.
— передаточный коэффициент звена.
Из изложенного выше следует, что уравнение (2.9) в этой форме перепишется в следующем виде:

 , (2.14)
, (2.14)
где  ;
;  ;
;  .
.
Во второй стандартной форме записи дифференциального уравнения используется передаточная функция системы, которая для рассматриваемого примера (2.11) имеет вид
 .
.
Передаточная функция САУ, поведение которой во времени описывается уравнением (2.9), имеет следующий вид :


 .
.
В формуле (2.15) через  и
и  обозначены изображения (по Лапласу) выходной и входной переменных САУ при нулевых начальных условиях и равенстве нулю внешних возмущений, а через
обозначены изображения (по Лапласу) выходной и входной переменных САУ при нулевых начальных условиях и равенстве нулю внешних возмущений, а через  и
и  — полиномы относительно комплексной переменной
— полиномы относительно комплексной переменной  .
.
Вторая стандартная форма записи дифференциального уравнения имеет следующий вид:
 или
или  . (2.16)
. (2.16)
В (2.16)  и являются полиномами (символическими) относительно оператора .
и являются полиномами (символическими) относительно оператора .
Из сравнения первой и второй стандартных форм записи дифференциальных уравнений следует, что с математической точки зрения различие между этими формами весьма несущественно и состоит лишь в различном представлении коэффициентов уравнений. В ТАУ принято называть уравнения вида (2.9) — (2.14), (2.16) уравнениями типа «вход-выход».
Третья стандартная форма записи дифференциального уравнения принципиально отличается от форм записи, описанных выше. В этой форме записи используются переменные состояния. Отметим, что понятие «состояние» является базовым в современной ТАУ (СТАУ). Переменные состояния — это промежуточные переменные системы (рис.2.2), число которых равно ее порядку  . В общем случае входные
. В общем случае входные  и выходные
и выходные  переменные могут быть векторными величинами размерности
переменные могут быть векторными величинами размерности  и
и  соответственно.
соответственно.
Рис.2.2 — Состояние системы | Переменные состояния называют также координатами состояния, так как их совокупность задает вектор состояния  . . |
Множество возможных положений этого вектора образует векторное пространство  , называемое пространством состояний системы. В переменных состояния САУ описывается векторно-матричным уравнением
, называемое пространством состояний системы. В переменных состояния САУ описывается векторно-матричным уравнением
 , (2.17)
, (2.17)
где  — квадратная матрица коэффициентов (ее называют также собственной параметрической матрицей системы);
— квадратная матрица коэффициентов (ее называют также собственной параметрической матрицей системы);  — входная матрица (матрица управления) системы;
— входная матрица (матрица управления) системы;  — выходная матрица системы;
— выходная матрица системы;
 — вектор переменных состояния — внутренних координат системы;
— вектор переменных состояния — внутренних координат системы;
 — вектор входных переменных (управляющих и возмущающих);
— вектор входных переменных (управляющих и возмущающих);
 — вектор наблюдаемых или выходных переменных; размерности матриц
— вектор наблюдаемых или выходных переменных; размерности матриц  ,
,  ,
,  , соответственно, (
, соответственно, (  ), (
), (  ), (
), (  ).
).
Процессы в САУ в свободном движении (без внешних воздействий) согласно уравнению (2.17) описываются векторно-матричным уравнением  с характеристическим уравнением
с характеристическим уравнением  , где
, где  — единичная матрица, или в развернутом виде системой дифференциальных уравнений
— единичная матрица, или в развернутом виде системой дифференциальных уравнений

с характеристическим уравнением
 . (2.18)
. (2.18)
Эти уравнения при определенных начальных условиях дают возможность изучить процессы в системе путем их решения численными методами с использованием ЭВМ.
Разработаны различные способы перехода от уравнений типа «вход-выход» к уравнениям состояния вида (2.17) и наоборот. Один из наиболее распространенных способов состоит в следующем. Пусть САУ описывается уравнением (2.9). Введем обозначения
 ,
,  , . ,
, . ,  ,
,
 .
.
С помощью этих обозначений преобразуем уравнение (3.1) к следующему виду:
 , (2.19)
, (2.19)
где  ;
;  ;
;
 ;
;  .
.
В нашем примере и  являются скалярными величинами. В общем случае (2.17) — это, соответственно, вектор наблюдаемых или выходных переменных и вектор входных переменных (управляющих и возмущающих), поэтому в (2.19) матрицы
являются скалярными величинами. В общем случае (2.17) — это, соответственно, вектор наблюдаемых или выходных переменных и вектор входных переменных (управляющих и возмущающих), поэтому в (2.19) матрицы  и
и  выродились в вектор-столбец и вектор-строку соответственно.
выродились в вектор-столбец и вектор-строку соответственно.
Система уравнений (2.19) представляет собой описание линейной непрерывной системы в пространстве состояний  . Уравнения (2.19) с матрицей
. Уравнения (2.19) с матрицей  называют уравнениями в форме Фробениуса.
называют уравнениями в форме Фробениуса.
Если  , то
, то
 ;
;  .
.
Форма уравнений (2.19) с подобными матрицами и  называется в ТАУ канонической формой фазовой переменной.
называется в ТАУ канонической формой фазовой переменной.
Задание 1
1.1. По дифференциальному уравнению системы:

Для каждого типового звена 1 – 12 (таблицы 2.1) в соответствии с его параметрами вывести дифференциальное уравнение, операторное уравнение, и выражение передаточной функции.
1.2Математическое описание типового звена системы автоматического регулирования записать в трех формах записи дифференциальных уравнений.
Первая стандартная символическая форма операторно-структурное описание системы, т.е. в виде операторов звеньев.
Во второй стандартной форме записи дифференциального уравнения используется передаточная функция системы.
Третья стандартная форма записи дифференциального уравнения — переменные состояния.
Таблица 2.1 – Исходные коэффициенты
| № п.п. | Наименование звена | а 0 | а 1 | а 2 | b0 | b1 | Примечания |
| Безынерционное (пропорциональное) | к | ||||||
| Инерционное 1-го порядка (апериодическое) | Т | k | |||||
| Инерционное 2-го по- рядка (апериодическое) | Т2 2 | Т1 | k | Т1³2Т2 | |||
| Инерционное 2-го по- рядка (колебательное) | Т2 2 | Т1 | k | Т1 T |
Задание 2
2.1Для каждого звена (таблицы 2.2) по его передаточной функции записать дифференциальное уравнение.
2.2 Математическое описание типового звена системы автоматического регулирования записать в трех формах записи дифференциальных уравнений.
| Вар | Передаточная функция | Значения параметров передаточной функции |
 | а0=1; а1=5; а2 =1,2; а3 =0,9; а4=0,5;в0=1;в1=3; в2=0,8;в3=0,3 | |
 | а0=1; а1=5; а2 =1,2; а3 =0,9; в0=1;в1=3; в2=0,8 | |
 | а0=1; а1=5; а2 =1,2; в0=1; в1=3; | |
 | а0=1; а1=5; а2 =1,2; а3 =0,9; а4=0,5; в0=10 | |
 | а0=1; а1=5; а2 =1,2; а3 =0,9; в0=10 | |
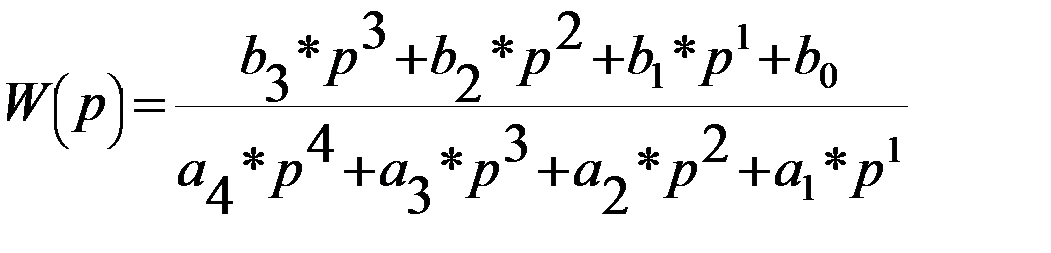 | а0=1; а1=5; а2 =1,2; а3=0,9;а4=0,5;в0=1;в1=3; в2=0,8;в3=0,3 | |
 | Т0=2; Т1=4; Т2=1,1;Т3=0,9 | |
 | Т0=2; Т1=4; Т2=1,1;Т3=1,1;Т4=,9 | |
 | К= 10;Т1=4; Т2=1,1;Т3=0,9 | |
 | К= 10; Т2=1,1;Т3=0,9 Т4=0,9 | |
 | Т0=0,7; Т1=3;Т2=1,2;Т3=0,9;Т4=0,8;Т5=0,5 | |
 | К=10 Т0=0,7; Т1=3;Т2=1,2;Т3=0,9;Т4=0,8;Т5=0,5; |
Задание №3
3.1 Для заданной схемы необходимо составить операторное уравнение для каждого элемента схемы САУ.
3.2. Определить входные и выходные величины каждого элемента, и определить передаточные функции отдельных элементов функциональной схемы.
Формы записи дифференциальных уравнений.
3.3Сформировать математическое описание систем автоматического регулирования в виде структурной схемы в буквенном и числовом обозначениях.
3.4 Сформировать математическое описание систем автоматического регулирования в виде третьей стандартной формы записи дифференциального уравнения — В переменных состояния САУ описываемых векторно-матричным уравнением.
Схема, показанная на рисунке 2.2, представляет собой САР температуры в помещении. Объектом регулирования (ОР) в данной системе является помещение, для которого регулируемая величина — температура внутри помещения Ө, регулирующее (управляющее) воздействие — температура воздуха ӨК, поступающего из калорифера, возмущающее воздействие — изменения внешних факторов f(в общем случае изменение температуры атмосферного воздуха, его влажности, скорости ветра). При исследовании системы в качестве основного возмущения следует рассматривать изменение температуры окружающего воздуха.
Воспринимающим органом — ВО (датчиком, чувствительным элементом) в данной САР является терморезистор RД, включенный в мостовую схему, обеспечивающую с помощью резистора RОзадание необходимого значения температуры в помещении и выполняющую также функции сравнивающего органа — СО (элемента сравнения). Усиление сигнала разбалансаΔU(сигнала рассогласования) измерительной мостовой схемы обеспечивается посредством усилителя. Усиленный сигнал Uобеспечивает вращение двухфазного исполнительного двигателя, который изменяет перемещение клапана (заслонки) на трубопроводе подачи парав калорифер, чем достигается изменение температуры воздуха на входе калорифера — регулирующего воздействия на объектерегулирования.
 |
1 — помещение; 2 — теплообменник (калорифер), 3 — измерительная мостовая схема; 4 — двухфазный исполнительный двигатель, 5 — дифференциальный магнитный усилитель; 6 — клапан (заслонка)
Рис. 2.2. Схема САР температуры
Динамические свойства объекта регулирования и элементов системы описываются следующими уравнениями:

где То, Т2, Т3, Т4 — постоянные времени, с; Ө — значение температуры воздуха в помещении, °С, Ө к — значение температуры воздуха на выходе калорифера, °С; к, к1, к2, к3, к4— коэффициенты передачи; f— возмущающее воздействие на объекте регулирования; Uд —падение напряжения на термодатчике, В; ΔU— напряжение на выходе мостовой схемы (сигнал рассогласования), В; μ. — линейное перемещение клапана, см; U0 — задающий сигнал, В.
Значения параметров элементов САР по вариантам даны в таблице 2.3.
Заданное значение температуры в помещении Ө = 20 °С.
Значения параметров элементов САР
| Вариант | Т0, с | Т2, с | к | к1, В/ 0 С | к4 | к2, см/(В*с) | f,. 0 С | К3, °С/см |
| 0,06 | 0,2 | 0,2 | 0,002 | -11 | ||||
| 0,07 | 0,25 | 0,3 | 0,001 | |||||
| 0,08 | 0,3 | 0,25 | 0,0018 | -8 | ||||
| 0,09 | 0,35 | 0,2 | 0,002 | |||||
| 0,10 | 0,4 | 0,2 | 0,002 | -5 | ||||
| 0,50 | 0,18 | 0,25 | 0,003 | |||||
| 0,055 | 0,19 | 0,4 | 0,0035 | |||||
| 0,06 | 0,17 | 0,4 | 0,0025 | -15 | ||||
| 0,06 | 0,25 | 0,2 | 0,0016 | |||||
| 0,08 | 0,4 | 0,15 | 0,0014 | -18 |
Примечание. Для всех вариантов постоянные времени Т3 = 20 с, Т4=0,5 с.
Схема САР, приведенная на рисунке 2.3, обеспечивает стабилизацию угловой скорости электродвигателя постоянного тока который совместно с рабочим механизмом является объектом регулирования. Регулируемая величина объекта — угловая скорость двигателя ω, регулирующее воздействие — напряжение Uг,подаваемое от генератора на якорь двигателя. Возмущающее воздействие на объекте регулирования — момент сопротивления Мс, создаваемый рабочим механизмом. Угловая скорость двигателя ωконтролируется тахогенератором, сигнал которого Uтг, пропорциональный скорости, сравнивается с задающим сигналом U3. Сигнал рассогласования ΔU = U3— UTг усиливается магнитным усилителем и воздействует на обмотку возбуждения генератора, выполняющего функции исполнительного органа (элемента).
Динамические свойства объекта регулирования и элементов САР описываются следующими уравнениями:

гдеТд, Ту, Tv — постоянные времени, с; Кд, Км, Ктг, Ку, Кг — коэффициенты передачи соответствующих элементов систем

1 — задающий потенциометр; 2 — магнитный усилитель; 3 — генератор; 4 — двигатель; 5 — тахогенератор; 6 — рабочий механизм
Рис. 2.3. Схема САР угловой скорости электродвигателя
Значения параметров элементов САР
| Вариант | Ту, с | Ку | Кг | Тг, с | Кд, рад/ с*В | Тд, с | Км рад/ с*Н* м | Мс, Н*м | Кгг, В*с/ рад |
| 0,020 | 4,0 | 2,0 | 0,10 | 1,0 | 0,5 | 0,02 | 1,0 | ||
| 0,015 | 5,0 | 1,8 | 0,12 | 0,95 | 0,60 | 0,03 | 0,9 | ||
| 0,018 | 4,5 | 1,7 | 0,15 | 0,85 | 0,70 | 0,04 | |||
| 0,022 | 6,0 | 1,5 | 0,20 | 0,8 | 0,80 | 0,05 | 0,7 | ||
| 0,020 | 5,8 | 1,6 | 0,16 | 1,5 | 0,65 | 0,06 | 0,6 | ||
| 0,025 | 4,2 | 2,0 | 0,25 | 1,4 | 0,75 | 0,07 | 0,5 | ||
| 0,020 | 3,5 | 2,7 | 0,22 | 1,3 | 0,80 | 0,08 | 0,4 | ||
| 0,028 | 6,2 | 2,1 | 0,30 | 1,2 | 0,75 | 0,02 | 0,5 | ||
| 0,018 | 6,5 | 2,3 | 0,16 | 1,0 | 0,50 | 0,013 | 0,6 | ||
| 0,014 | 7,0 | 2,5 | 0,20 | 1,25 | 0,80 | 0,015 | 0,7 |
Значения параметров объекта регулирования и элементов системы для различных вариантов указаны в таблице 2.4. Заданное значение угловой скорости ω = 40 рад/с.
На рисунке 2.4 изображена схема САР давления Р в ресивере (воздухосборнике) 1, который является в данной системе объектом регулирования. Давление в ресивере регулируется посредством изменения количества воздуха Q, зависящего от положения заслонки 2, т.е. от ее линейного перемещения Х3, которое можно рассматривать как регулирующее воздействие на входе объекта регулирования. Внешним возмущением, вызывающим отклонение регулируемой величины — давления Р, является изменение расхода сжатого воздуха Qc.

Рис 2.4 Схема САР давления Р в ресивере
Давление в данной системе контролируется с помощью сильфонного датчика 3, выходная величина которого — перемещение Хс сильфона 5 однозначно зависит от разности сил ΔF= F0— Fp, где Fp— сила, создаваемая давлением Р, F0— сила натяжения пружины 6, которое можно изменять винтом 7.
Перемещение сильфона Хсс помощью потенциометрического преобразователя 4 преобразуется в электрический сигнал — напряжение U, которое усиливается электронным усилителем 8. Выходной сигнал усилителя Uyуправляет электромагнитным приводом 9, связанным с заслонкой 2,
В данной САР сильфонный датчик выполняет функции воспринимающего, задающего и сравнивающего органов. Как воспринимающий орган он контролирует давление Р, преобразуя его в силу Fp. Задание требуемого давления в ресивере обеспечивается посредством силы F0. Как сравнивающий орган сильфон обеспечивает сравнение величин F0 и Fp, в результате чего, как отмечалось ранее, получается ΔF= F0 — Fp — сигнал рассогласования.
Динамические свойства объекта регулирования и элементов САР описываются следующей системой уравнений:

| заслонкой |
Физическая сущность переменных, входящих в уравнения, отражена выше в описании схемы САР. Параметры T0, T1, T2, T3 и К0, Кq, Кв, Кc, Кп, Ку, К3 — соответственно постоянные времени и коэффициенты передачи. Их размерности и значения по вариантам даны в таблице 2.5. Требуемое значение давления Р = 500 кПа.
Значения параметров элементов САР
| Вариант | Т0,с | Ко КПа/мм | Т1,с | Т2,с | Кс мм/Н | Кв Н/кПа | КQ, Кпа*с/м 3 | ΔQC, м3/с | Кп В/мм | Ку | Т3 | К3 Мм/В |
| 1,3 | 0,2 | 0,045 | 2,5 | 0,5 | 0,1 | 0,2 | 0,01 | |||||
| 0, 25 | 0 ,04 | 2,5 | 0,5 | -0, 2 | 0,2 | 0,01 | ||||||
| 0,6 | 3,5 | 0,34 | 0,022 | 2,5 | 0,5 | 0,3 | 0,2 | 0,01 | ||||
| 4,8 | 0,25 | 0,035 | 2,5 | 0,5 | -0,15 | 0,2 | 0,01 | |||||
| 0,7 | 4,5 | 0,3 | 0,04 | 2,5 | 0,5 | 0,12 | 0, 9 | 0,01 | ||||
| 0,8 | 3,5 | 0,18 | 0, 025 | 2 ,5 | 0,5 | -0,2 | 0 ,2 | 0,01 | ||||
| 0,4 | 4,4 | 0,25 | 0,03 | 2,5 | 0,5 | 0,11 | 0,2 | 0,01 | ||||
| 0,65 | 5,5 | 0,2 | 0,02 | 2,5 | 0,5 | -0,12 | 0,2 | 0,01 | ||||
| 0, 7 | 0, 4 | 0 ,025 | 2,5 | 0,5 | 0,14 | 0,2 | 0,01 | |||||
| 0,55 | 0,25 | 0,035 | 2,5 | 0,5 | -0,14 | 0,2 | 0,01 |
На электрических станциях при производстве электроэнергии предъявляют определенные требования к стабильности частоты f генерируемой ЭДС. Частота f однозначно определяется угловой скоростью ω рабочего колеса гидротурбины. В связи с этим гидротурбины на электростанциях оснащают САР угловой скорости. На рисунке 2.5 показана схема одного из вариантов такой САР.
В данной системе объектом регулирования является гидротурбина 1, регулируемой величиной — угловая скорость ω .Она при постоянном расходе воды изменяется в зависимости от нагрузки на валу турбины, т. е. от мощности Р, которая потребляется от генератора 2 (с увеличением мощности угловая скорость снижается, с уменьшением — возрастает). Таким образом, мощность Р является внешним возмущающим воздействием на объекте регулирования. Для регулирования угловой скорости предусмотрена заслонка 3, с помощью которой изменяется расход воды через турбину. Он однозначно зависит от вертикального перемещения X заслонки. Следовательно, перемещение заслонки X можно рассматривать как регулирующее воздействие объекта регулирования. Угловая скорость ω контролируется посредством тахогенератора 4, ЭДС Е которого сравнивается с задающим напряжением U0. Сигнал рассогласования Δ U через усилитель 5 управляет посредством электродвигателя 6 и редуктора 7 заслонкой 3.
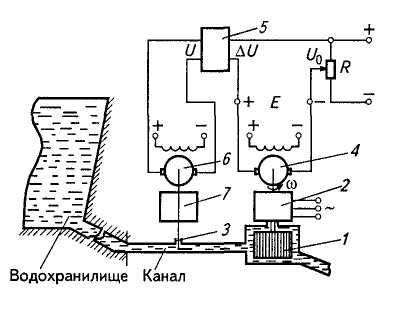 |
Рис. 2.5 Схема САР угловой скорости рабочего колеса гидротурбины
Динамические свойства элементов САР описываются следующей системой уравнений:
Дифференциальные уравнения, общие понятия
Дифференциальные уравнения — это отдельный вид функциональных уравнений. А значит для дифференциальных уравнений такие понятия, как функция, аргумент функции, область определения функции и т.п., также являются актуальными.
Главное отличие дифференциальных уравнений от фунцкциональных в том, что одна из переменных (как правило искомая неизвестная величина) является производной или дифференциалом функции, аргументом которой является вторая переменная, впрочем аргументов у функции может быть несколько.
В общем случае определение дифференциального уравнения может выглядеть так:
Дифференциальным уравнением называется равенство между функцией и ее производной или дифференциалом.
Дифференциальное уравнение называется обыкновенным, если искомая функция зависит от одного аргумента. Например:
у’ = f(x) (539.1)
Напомню, функциональное уравнение может иметь следующий вид:
у = f(x) (538.1)
Дифференциальное уравнение называется уравнением в частных производных, если искомая функция зависит от нескольких аргументов. Например:
у’ = f(x1,x2) или у’ = f(x,u) (539.2)
где х1, х2 или х, u — возможные обозначения для различных аргументов функции.
Порядком дифференциального уравнения считается порядок наивысшей производной, входящей в уравнение. Например уравнение (539.1) является уравнением первого порядка. Уравнение второго порядка может иметь вид:
y» = f(x) (539.3)
Решением дифференциального уравнения является функция, подставление которой вместо неизвестной функции обращает уравнение в тождество. Другими словами уравнение становится равенством.
А теперь эти общие математические понятия (кстати тут приведены далеко не все основные понятия) попробуем описать простым человеческим языком, но начать придется издалека.
Производная функции
Мы живем в несовершенном, постоянно изменяющемся мире. Все течет, все изменяется, как подметил еще Гераклит. Однако в древности были и другие мыслители, которые в отличие от Гераклита пытались этот мир как-то понять и оценить. Так далеко в историю мы заглядывать не будем, хотя предпосылки к дифференциальному исчислению следует искать именно там, а ограничимся простыми и наглядными примерами:
Пример 1
Мы вышли из пункта А в пункт Б и находились в пути 4 часа, каждый час мы проходили по 2 километра. Вопрос: какое расстояние между пунктами А и Б?
Вообще это задачка для 3-4 класса начальной школы и решить ее вроде бы не сложно (потому я ее и выбрал): достаточно сложить все расстояния, пройденные за каждый час, а так как эти расстояния одинаковые, то можно еще больше упростить задачу, умножив на 4 расстояние, пройденное за один промежуток времени. Таким образом расстояние между пунктами А и Б составляет:
2 км · 4 = 8 км (539.4)
А между тем условия задачи можно рассматривать и по другому, т.е. как зависимость пройденного расстояния от времени. В этом случае у нас время -независимая переменная t или аргумент функции, а пройденное расстояние — значение функции в тот или иной момент времени или переменная s. Тогда условия задачи соответствуют следующему функциональному уравнению:
s = f(t) = 2t (539.5)
а также графику этой функции:
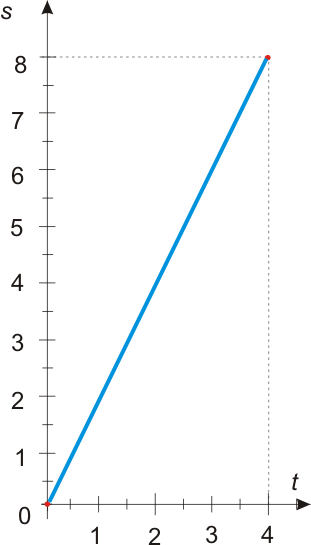
Рисунок 539.1. График функции f(t) = 2t.
Так если по оси t откладывать промежутки времени Δt (ч), которое мы были в пути, а по оси s — преодоленное за эти промежутки времени расстояние Δs (км), то график указанной функции будет иметь такой вид, как показано на рисунке 539.1. В общем случае используются более привычные оси х и у, соответственно рассматриваются функции вида y = f(x), но сути дела это никак не меняет.
Решая уравнение (539.5) мы можем определить не только общее расстояние, преодоленное за 4 часа пути, но и в любой интересующий нас момент времени. Например, нас интересует, какое расстояние мы прошли за 1.5 часа. Согласно уравнению (539.5) это расстояние составит 2·1.5 = 3 километра.
А если нас интересует не расстояние, преодоленное к тому или иному моменту времени, а скорость движения? Можем ли мы определить эту скорость на основе имеющихся данных?
Оказывается можем, потому что скорость — это тоже функция, которая в свою очередь также зависит от времени.
Так как каждый час мы преодолевали по 2 км, то отсюда можно сделать вывод, что скорость нашего движения была постоянной, тогда по давно известному нам уравнению, описывающему движение с постоянной скоростью:
v = s/t = 8/4 = 2 км/ч (539.6)
В данном случае, так как скорость постоянная, не имеет значения, на каком временном промежутке мы эту скорость определяем. Тем не менее рассмотрим данную ситуацию с точки зрения математики.
Временные промежутки, когда засекалось пройденное расстояние, мы обозначим как Δt = 1, соответственно t = ΣΔt = 1 + 1 + 1 + 1 = 4. Расстояния, пройденные за эти промежутки времени обозначим как Δs = 2. На графике функции это будет выглядеть так:

Рисунок 539.2
С точки зрения математики временные промежутки Δt — это приращение аргумента функции:
Δt = t — t0 (539.7)
Соответственно расстояния, пройденные за рассматриваемый промежуток времени — это приращение функции:
Δs = Δf(t) = f(t) — f(t0) (539.8)
А так как использовать греческую литеру Δ не всегда удобно (в частности мне для этого приходится заходить в отдельный редактор текста, а наборщикам в типографиях вставить эту литеру было еще сложнее), то часто приращение значения искомой функции и приращение аргумента функции обозначают как ds и dt.
Тогда формулу определения скорости можно записать так:
v = ds/dt (539.9)
Таким образом мы с одной стороны вроде бы просто разделили расстояние на время — задача для 3-4 класса, а с другой стороны мы определили производную функции s = f(t), соответствующим образом ее продифференцировав, а это уже задача курса алгебры, а то и высшей математики.
Возможно и не стоило это так подробно расписывать, но на мой взгляд это очень важно, чтобы показать, что в дифференциальном исчислении нет ничего трудного, если рассматривать его на соответствующих примерах.
Итак скорость v является производной функции s = f(t) = 2t. Дифференциальное уравнение в этом случае будет выглядеть так:
v = s’ = f'(t) (539.10.1)
v = (2t)’ = 2 (539.10.2)
Но и это еще не все, на основании имеющихся данных: времени в пути и расстояний, преодоленных за 1 час, мы можем определить ускорение нашего движения.
Так как скорость нашего движения оставалась постоянной, соответственно dv = 0, то само собой и ускорения никакого не было, ни положительного ни отрицательного. Другими словами ускорение нашего движения составляло а = 0 км/ч 2 .
На языке математики это будет выглядеть так:
а = v’ = dv/dt = s» = d 2 s/dt 2 (539.11.1)
a = 0/1 = (2t)» = (2)’ = 0 (539.11.2)
Т.е. в данном случае для определения ускорения нужно определить первую производную функции скорости (уравнения, выражающего зависимость скорости от времени) или вторую производную функции расстояния (уравнения, выражающего зависимость пройденного расстояния от времени).
На основании вышеизложенного мы можем дать следующее предварительное определение производной:
Производная — это скорость изменения функции
В рассмотренном выше примере скорость движения — это скорость изменения функции расстояния, а ускорение — это скорость изменения функции скорости. Если бы мы все 4 часа сидели на месте, то и расстояние, пройденное нами, было бы равно нулю, и скорость и ускорение, но даже для такого случая можно записать соответствующие дифференциальные уравнения:
Однако в жизни гораздо чаще встречаются функции, даже третьи производные которых не равны нулю.
Рассмотрим другой пример все с тем же движением, на этот раз чуть более сложный.
Пример 2
По ровной наклонной поверхности скатывается шар. Начальная скорость движения равна vo = 0. Определить пройденное шаром за 4 секунды расстояние, скорость после 1, 2, 3 и 4 секунд движения и постоянное ускорение движения, если за первую секунду шар преодолел расстояние 3 м, за вторую — 9 м, за третью — 15 м, за четвертую — 21 м.
С определением пройденного расстояния по прежнему проблем нет: достаточно сложить расстояния, которые преодолел шар за каждую секунду s = ΣΔs = 3 + 9 + 15 + 21 = 48 метров. А вот скорость и ускорение в данном случае определить не так просто. Тем не менее попробуем.
Если воспользоваться полученными раннее знаниями, то вроде бы в первый промежуток времени скорость должна быть равна:
Вот только в данном случае у нас скорость — изменяющаяся величина, зависящая от времени, поэтому результат полученный при решении уравнения (539.12) можно рассматривать лишь как среднюю скорость движения на первом участке. Тогда более правильно уравнение скорости на первом участке записать так:
v1ср = ds1/dt1 = 3/1 = 3 м/с (539.12.2)
Подобным образом мы достаточно легко можем определить среднюю скорость на всех участках пути, и она составит v2ср = 9 м/с, v3ср = 15 м/с, v4ср = 21 м/с, но в данном случае нас интересует не среднее значение функции скорости на рассматриваемом участке, а значение функции скорости во вполне определенной точке, т.е. после 1, 2, 3 и 4 секунд движения. Как это сделать?
По условиям задачи ускорение — производная от скорости — является постоянной величиной, т.е. скорость изменения скорости будет постоянной. В этом случае значение средней скорости является средним арифметическим от начальной и конечной скорости на рассматриваемом участке:
тогда при vo = 0
v1 = 3·2 = 6 м/с (539.13.2)
Соответствующим образом мы можем определить значения скорости и в остальных точках, например (6 + v2)/2 = 9, v2 = 9·2 — 6 = 12 м/с; (12 + v3)/2 = 15, v3 = 15·2 — 12 = 18 и так далее, а теперь переведем полученные данные на язык высшей математики. Мы видим, что v1 = 6·1, v2 = 6·2 = 12, v3 = 6·3 = 18, т.е. значение скорости явно зависит от времени, соответственно уравнение скорости мы можем записать следующим образом:
v = s’ = 6t (539.14)
Соответственно ускорение движения шара составит:
a = v’ = (6t)’ = 6 м/с 2 (539.15)
Между тем, если бы нам были заданы меньшие значения временных промежутков и соответственно меньшие значения пройденных расстояний за эти промежутки времени, например при dt1 = 1 секунда, ds1 = 3 м, dt2 = 0.1 секунды и ds2 = 0.63 м, то средняя скорость на рассматриваемом втором участке составила бы v2ср = ds/dt = 0.63/0.1 = 6.3 м/с, а скорость в в точке t2: v2сp = (6 + v2)/2 = 6.3, v2 = 12.6 — 6 = 6.6 м/с. Т.е. закономерность изменения значения скорости никуда не девается, тем не менее, чем меньше рассматриваемый временной промежуток dt, тем меньше разница между значением средней скорости изменения функции и скоростью изменения функции в рассматриваемой точке. Из этого можно сделать еще один очень важный вывод:
Скорость изменения функции может быть разная. Чем меньше приращение аргумента функции dt, тем ближе значение среднего изменения скорости к изменению скорости функции в рассматриваемой точке.
На основании этого можно сформулировать более полное определение производной функции:
Производная функции в точке — это скорость изменения функции в рассматриваемой точке при стремлении приращения аргумента функции к нулю (Δt → 0)
Поэтому иногда производную называют мгновенной скоростью изменения функции. В нашем случае уравнение производной будет выглядеть так:
 (539.16)
(539.16)
На данном этапе вид формулы (539.16) нас уже не пугает (во всяком случае мне так кажется). Совсем другое дело, когда подобная формула приводится в начале темы, посвященной рассмотрению производных функции.
Дифференциал (первообразная) функции
С задачей определения скорости и ускорения в примере 2 мы вроде бы справились и даже составили соответствующие уравнения (539.14) и (539.15). Но иногда требуется решить и обратную задачу — например определить исходное уравнение, описывающее зависимость перемещения от времени.
Если скорость является производной функции расстояния v = s’, то расстояние при этом является первообразной (дифференциалом) функции скорости s = ∫v. Процесс нахождения первообразной функции называется интегрированием. Так, чтобы получить уравнение зависимости пройденного расстояния от времени, нам нужно проинтегрировать уравнение скорости. При этом уравнение расстояния более правильно записывать так
s = ∫vdt (539.17)
В общем случае интегрирование может быть более сложной задачей, чем дифференцирование, потому что функции бывают не только степенными, как в данном примере, но и тригонометрическими, обратными тригонометрическими и т.п., но пока нас интересует, как проинтегрировать простую степенную функцию вида f(t) = 6t.
Вообще-то мы могли сразу построить график, отражающий зависимость пройденного расстояния от времени по данным примера 2, тем не менее сделаем это сейчас, а заодно построим график для уравнений скорости и ускорения и расположим их в такой последовательности:

Рисунок 539.3. Графики степенных функции а) а= 6, б) v = at, в) s = at 2 /2.
Как видим, график, отражающий зависимость ускорения от времени, у нас самый простой. Ускорение постоянное, а = 6 м/с 2 и от времени никак не зависит. Тем не менее, зная ускорение, мы можем определить скорость движения в любой точке времени. Так из уравнений (539.14) и (539.15) следует, что:
v = 6t = at (539.14.2)
Соответственно решая это уравнение, мы можем определить скорость в любой момент времени.
Но если рассматривать это действие с точки зрения геометрии, то мы, умножая ускорение на время, определяем площадь прямоугольника со сторонами а = 6 и t. При t = 4 площадь прямоугольника составит 6·4 = 24, точнее 24 м/с так как мы все-таки определяем скорость.
Если мы построим график, отражающий зависимость изменения скорости от времени, то увидим, что на этом графике значения скорости в той или иной момент времени соответствуют площадям прямоугольника со сторонами а = 6 и t.
Получается, что если определить площадь треугольника со сторонами v и t, то это и будет расстояние, преодоленное к тому или иному промежутку времени:
s = vt/2 = at 2 /2 = 6t 2 /2 = 3t 2 (539.18)
Уравнение (539.18) можно записать как дифференциальное:
s = ∫6tdt = 3t 2 (539.18.2)
Если график, показанный на рисунке 539.3.в) также является графиком для производной некоторой функции, то для определения первообразной этой функции нам также следовало бы найти площадь фигуры, ограниченной квадратной параболой.
Сделать это в принципе не сложно, так как площадь фигуры, очерченной квадратной параболой таким образом, как показано на рисунке 539.3.в) в 3 раза меньше площади прямоугольника со сторонами s и t, соответственно S = st/3 = 3t 2 t/3 = t 3 и эту процедуру можно повторять до бесконечности.
Почему площадь фигуры, ограниченной квадратной параболой именно в 3 раза меньше, чем площадь прямоугольника, а площадь фигуры ограниченной кубической параболой в 4 раза меньше площади прямоугольника, я здесь объяснять не буду, тем не менее такая закономерность существует и в математическом выражении выглядит так:
∫aх n dx = ax n+1 /n + C (539.19)
В данном случае С — это некоторая постоянная величина. Как мы выяснили, при дифференцировании постоянные величины обращаются в нуль, как пример — уравнение (539.11.2), соответственно решая обратную задачу, т.е. интегрируя функцию, мы допускаем, что некая постоянная величина в первообразной функции была.
Например в общем случае уравнение скорости (539.14.2) должно выглядеть так:
v = vo + at (539.14.3)
где vo — это и есть некая постоянная величина. В нашем случае по условиям задачи vo = 0, поэтому мы использовали сокращенную форму записи.
Определенный интеграл
В общем случае график функции может выглядеть как угодно, например так:

Рисунок 539.4
В этом случае сразу определить площадь фигуры, ограниченной графиком функции, не получится. Но мы можем разбить эту фигуру на участки шириной Δх и определить среднее значение у для каждого участка. Теперь определить площади трех прямоугольников большого труда не составит, вот только суммарная площадь прямоугольников не будет равна площади фигуры, ограниченной графиком функции:
S ≈ ∑yiΔx (539.20)
Но чем больше будет у нас прямоугольников с шириной Δх, т.е, чем меньше будет значение Δх, тем точнее будет значение у, а значит и суммарная площадь прямоугольников будет ближе к площади фигуры, ограниченной графиком функции.
При интегрировании, как и при дифференцировании для получения более точного результата приращение аргумента функции должно стремиться к нулю (maxΔx → 0) .
Из этого можно сделать следующий вывод:
Если существует предел суммы, определяемой по формуле (539.20) вне зависимости от количества прямоугольников и при стремлении ширины прямоугольников к нулю, то такой предел называется определенным интегралом, а суммы, определяемые по формуле (539.20) — интегральными суммами.
Так как на рисунке 539.4 показан график непрерывной функции, то такая функция является интегрируемой и для определения дифференциала функции используется определенный интеграл. При этом 0 и 3 — это пределы интегрирования.
На этом пока все.
Доступ к полной версии этой статьи и всех остальных статей на данном сайте стоит всего 30 рублей. После успешного завершения перевода откроется страница с благодарностью, адресом электронной почты и продолжением статьи. Если вы хотите задать вопрос по расчету конструкций, пожалуйста, воспользуйтесь этим адресом. Зараннее большое спасибо.)). Если страница не открылась, то скорее всего вы осуществили перевод с другого Яндекс-кошелька, но в любом случае волноваться не надо. Главное, при оформлении перевода точно указать свой e-mail и я обязательно с вами свяжусь. К тому же вы всегда можете добавить свой комментарий. Больше подробностей в статье «Записаться на прием к доктору»
Для терминалов номер Яндекс Кошелька 410012390761783
Номер карты Ymoney 4048 4150 0452 9638 SERGEI GUTOV
Для Украины — номер гривневой карты (Приватбанк) 5168 7422 4128 9630
- Расчет конструкций . Уравнения, основные понятия
Примечание: Возможно ваш вопрос, особенно если он касается расчета конструкций, так и не появится в общем списке или останется без ответа, даже если вы задатите его 20 раз подряд. Почему, достаточно подробно объясняется в статье «Записаться на прием к доктору» (ссылка в шапке сайта).
http://megaobuchalka.ru/5/12593.html
http://doctorlom.com/item539.html