Записать передаточную функцию по дифференциальному уравнению
Контрольная работа: Передаточные функции одноконтурной системы
Название: Передаточные функции одноконтурной системы Раздел: Рефераты по математике Тип: контрольная работа Добавлен 21:52:15 24 декабря 2010 Похожие работы Просмотров: 508 Комментариев: 14 Оценило: 3 человек Средний балл: 5 Оценка: неизвестно Скачать
Практическая работа № 1
1. По заданным дифференциальным уравнениям определить операторные уравнения при нулевых начальных условиях, передаточные функции, структурные схемы звеньев, характеристические уравнения и их корни. Показать распределение корней на комплексной плоскости.
Оценить устойчивость каждого из звеньев.
а) ; б).
2. По заданной передаточной функции записать дифференциальное уравнение:
.
1.а). Дифференциальное уравнение можно записать в виде:
.
Обозначим Y(s) и F(s) как изображения сигналов соответственно y и f , тогда операторное уравнение (при нулевых начальных условиях) примет вид:
1,25s3Y(s) – 4s2Y(s) + 5sY(s) = 3F(s) – sF(s).
Данное уравнение можно преобразовать, вынеся Y(s) и F(s) за скобки:
Y(s). (1,25s3 – 4s2 + 5s) = F(s). (3 – s).
.
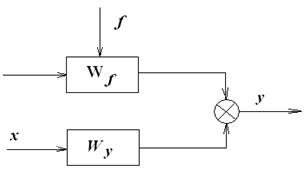
Очевидно, что входной сигнал x отсутствует, и выходной сигнал у определяется только внешним воздействием f (система, действующая по возмущению): , то получается уравнение Y(s) = WF(s).F(s). Структурная схема объекта приведена на рис. 1.
Передаточная функция имеет знаменатель, называемый характеристическим выражением:
A(s) =.
Если приравнять данное выражение к нулю, то образуется характеристическое уравнение , корни которого:
, и .
Распределение корней на комплексной плоскости показано на рис. 2. По рисунку видно, что корни лежат в правой полуплоскости, следовательно, объект неустойчив.
б) Дифференциальное уравнение можно записать в виде:
.
Обозначим Y(s), X(s) и F(s) как изображения сигналов соответственно y , x и f , тогда операторное уравнение (при нулевых начальных условиях) примет вид:
2s2Y(s) + 4sY(s) + 10Y(s) = 3X(s) + 4sF(s).
Данное уравнение можно преобразовать, вынеся Y(s) и X(s) за скобки:
Y(s). (5s2 + 4s + 10) = 3X(s) + 4sF(s).
.
Если обозначить передаточные функции объекта как
и ,
то получается уравнение Y(s) = Wx(s).X(s) + WF(s).F(s). Структурная схема объекта приведена на рис. 3.
Характеристическая функция имеет вид:
,
а характеристическое уравнение:
.
Корни этого уравнения равны:
и .
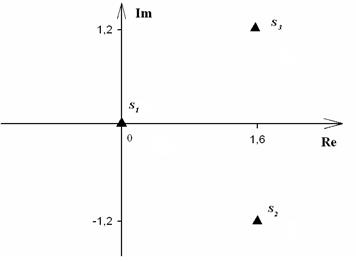
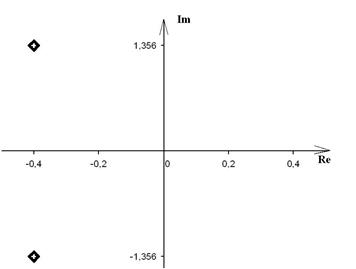
Распределение корней на комплексной плоскости показано на рис. 4:
Все корни характеристического уравнения лежат в левой полуплоскости, очевидно, что объект устойчив.
Дана одноконтурная АСР, для которой определена передаточная функция регулятора (Р) с настройками и дифференциальное уравнение объекта управления (ОУ). Требуется определить:
— передаточную функцию разомкнутой системы W∞(s),
— характеристическое выражение замкнутой системы (ХВЗС),
— передаточные функции замкнутой системы Фз(s) – по заданию, Фв(s) – по возмущению, ФЕ(s) – по ошибке,
— коэффициенты усиления АСР,
Р — ПИ-регулятор с ПФ вида ;
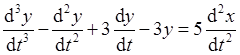
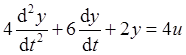
дифференциальное уравнение объекта управления:
.
Определим передаточную функцию объекта:
Wоб(s) .
Передаточная функция разомкнутой системы имеет вид:
Характеристическое выражение замкнутой системы:
;
Передаточные функции замкнутой системы:
— по заданию;
— по ошибке;
— по возмущению.
По передаточным функциям определим коэффициенты усиления путем подстановки в них s = 0:
К3 = Ф3(0) = 1 – по заданию;
КЕ = ФЕ(0) = 0 – по ошибке;
Кв = Фв(0) = 0 – по возмущению.
Определим устойчивость АСР по критерию Гурвица.
Так как коэффициенты ХВЗС а3 = 4, а2 = 6, а1 = 18, а0 = 4 (степень полинома n = 3), то матрица Гурвица имеет вид:
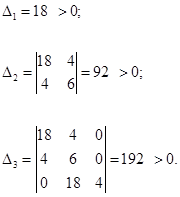
Диагональные миноры матрицы равны соответственно:
Поскольку все определители положительны, то АСР является устойчивой.
Практическая работа № 3
По табличным данным построить переходную кривую объекта, определить параметры передаточной функции объекта, рассчитать настройки ПИД-регулятора, обеспечивающие 20%-е перерегулирование.
DXвх = 5,5 кПа; DY = 0,149 %; tзап = 40 сек
2. Математическое описание систем автоматического управления ч. 2.9 — 2.13
Лекции по курсу «Управление Техническими Системами», читает Козлов Олег Степанович на кафедре «Ядерные реакторы и энергетические установки», факультета «Энергомашиностроения» МГТУ им. Н.Э. Баумана. За что ему огромная благодарность.
Данные лекции только готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика приветствуется.
В предыдущих сериях:
В это части будут рассмотрены:
2.9. Использование обратных преобразований Лапласа для решения уравнений динамики САР (звена). 2.10. Весовая и переходная функции звена (системы). 2.11. Определение переходного процесса в системе (САР) (звене) через весовую и переходную функции. 2.12. Mетод переменных состояния. 2.13. Переход от описания переменных «вход-выход» к переменным состояния.
Попробуем применить, полученные знания на практике, создавая и сравнивая расчетные модели в разных видах. Будет интересно познавательно и жестко.
2.9. Использование обратных преобразований Лапласа для решения уравнений динамики САР (звена)
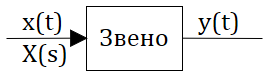
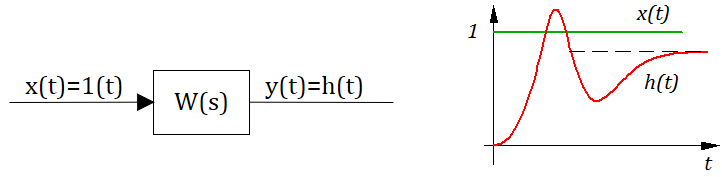
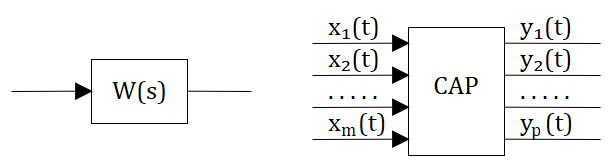
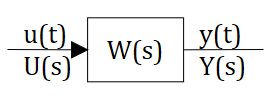
Рассмотрим динамическое звено САР изображенное на рисунке 2.9.1
Подставим полученные выражения в уравнение динамики и получим уравнение динамики в изображениях:
B(s) — слагаемое, которое определяется начальными условиями, при нулевых начальных условиях B(s)=0. W(s) — передаточная функция.
Передаточной функцией САР (звена) называется отношение изображений выходного сигнала к входному воздействию при нулевых н.у.
После того, как в явном виде найдено изображение для неизвестной выходной величины, нахождение оригинала не представляет сложностей. Либо по формуле Хэвисайда, либо разложением на элементарные дроби, либо по таблице из справочника.
Пример
Построить выходной сигнал звена САР при единичном входном воздействии и нулевых начальных условиях, если уравнение динамики звена имеет следующий вид:
Подставим в уравнение динамики и получим уравнение динамики в изображениях:
Для получения выходного сигнала из уравнения в изображениях выполним обратное преобразования Лапласа:
2.10. Весовая и переходная функции звена (системы).
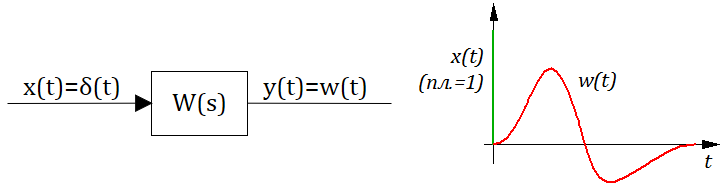
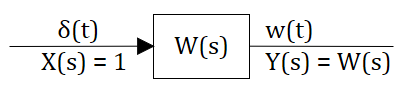
Определение:Весовой функцией звена (системы) называется реакция системы при нулевых н.у. на единичное импульсное воздействие.
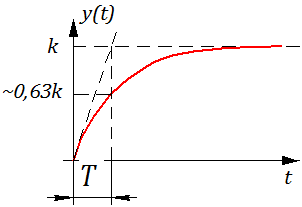
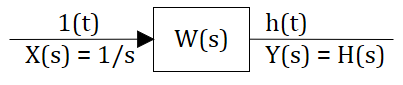
Определение:Переходной функцией звена (системы) при н.у. называется реакция на единичное ступенчатое воздействие.
На этом месте можно вспомнить, что преобразование Лапласа это интеграл от 0 до бесконечности по времени (см. предыдущий текст), а импульсное воздействие при таком интегрировании превращается в 1 тогда в изображениях получаем что:
Передаточная функция играет роль изображения реакции звена или системы на единичное импульсное воздействие.
Для единичного ступенчатого воздействия преобразование Лапласа тоже известно (см. предыдущий текст):
тогда в изображениях получаем, что реакция системы на ступенчатое воздействие, рассчитывается так:
Реакция системы на единичное ступенчатое воздействие рассчитывается обратным преобразованием Лапласа:
2.11. Определение переходного процесса в системе (САР) (звене) через весовую и переходную функции. Формула Дюамеля-Карсона
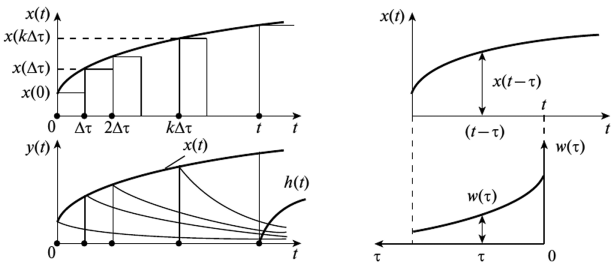
Предположим, что на вход системы поступает произвольное воздействие x(t), заранее известное. Найти реакцию системы y(t), если известны входное воздействие x(t) и весовая функция w(t).
Представим, что входное воздействие представляет собой последовательность прямоугольных импульсов до времени t и ступеньки высотой x(t) в момент времени t. см.рис. 2.11 Для каждого импульса мы можем записать реакцию системы через весовую функциию:
где: — значение отклика по завершению предыущего импульса; — время завершения текущего импульса; — значение весовой функции в начале текущего импульса.
Тогда для определения занчения отклика в произвольный момент времени необходимо сложить все импульсы и ступенчатое воздействие в момент времени t:
Переходя к пределам
если перейти от t к бесконечности мы получим формулу интеграла Дюамеля-Карсона, или по другому «интеграла свертки» который обеспечивает вычисление оригинала функции по произвдению изображения двух функций:
где — вспомогательное время
Для вывода аналогичной зависмости от переходной функции вспомним что изображение весовой и переходной функции связаны соотношением: запишем выражение изображения для отклика в операторной форме:
Используя интеграл свертки получаем, что при известной переходной функции (h(t)) и известному входному воздействию х(t) выходное воздействие рассчитывается как:
2.12. Mетод переменных состояния.
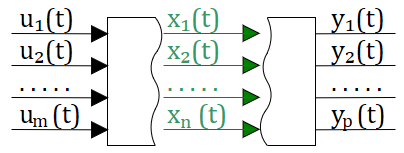
До этого мы рассматривали системы с одной передаточной функцией, но жизнь всегда сложнее и как правило в системах есть несколько передаточных функций несколько входных воздейстий и несколько реакций системы. (см. рис. 2.12.1)
В этом случае наиболее удобной формой пердставления систем для их анализа и расчета оказался метод переменных состояния. Для этого метода, вместо передаточных функций связывающих вход с выходом используются дополнительные переменные состояния, которые описывают систему. В этом случае можно говорить, что состояние системы — это та минимальная информация о прошлом, которая необходима для полного описания будущего поведения (т.е. выходов) системы, если поведение ее входов известно. см. рис. 2.12.2
В методе состояний, производные всех переменных состояния, в общем случае зависит от всех переменных и всех входных воздействия, и могут быть записаны в представленной ниже системы обыкновенных дифференциальных уравнений (ОДУ) первой степени. Эта система уравнений называю системой ОДУ в форме Коши:
Выход из системы зависит от переменных состояния и, в общем случае от входных воздействий и описывается следующей системой уравнений:
где: n — количество перемнных состояния, m — количество входных воздействий, p — количество выходных переменных;
Данная система уравнений может быть записана в матричной форме:
где: — вектор входа (или вектор управления); — вектор столбец производных переменных состояния; — вектор столбец переменных состояния; — вектор выхода; — собственная матрица системы [n x n], — постоянные коэффициенты; — матрица входа [n x m], — постоянные коэффициенты; — матрица выхода а [p x n], — постоянные коэффициенты; — матрица обхода [p x m], — постоянные коэффициенты;
В нашем случае почти всегда все элементы матрицы D будут нулевыми: D = 0.
Такое описание системы позволяет с одной стороны стандартным образом описывать различные технические системы. Явная формула для расчета производных позволяет достаточно просто осуществлять численное интегрирование по времени. И это используется в различных программах моделирования
Другое использование данного представления для простых систем, описанных в переменных «вход-выход», зачастую позволяет устранить технические трудности, связанные с решением ОДУ высокой степени.
Еще одним преимуществом данного описания, является то, что уравнения в форме Коши можно получить из законов физики
Пример решения задачи в форме коши.
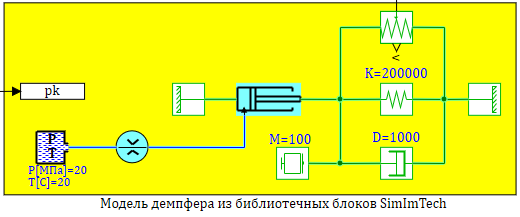
Рассмотрим задачу моделирования гидравлического привода, при следующих условиях:
Дано: Цилиндрический плунжер диаметром 10 мм, с приведенной массой 100 кг, работает на пружину жесткостью 200 Н/мм и демпфер с коэффициентом вязкого трения — 1000 Н/(м/с). Полость начальным объемом 20 см 3 соединяется с источником давлния дросселем диаметром диаметр которого 0,2 мм. Коэффициент расхода дросселя 0.62. Плотность рабочей жидкости ρ = 850 кг/м 3 . Определить: Перемещение дросселя, если в источнике давление происходит скачек 200 бар. см. рис. 2.12.13
Уравенение движение плунжера:
Где: – площадь плунжера, – жесткость пружины, – коэффициент вязкого трения, p – давление в камере.
Поскольку дифференциальное движения это уравнение второго порядка, превратим его в систему из двух уравнений первого порядка, добавив новую переменную — скорость , тогда
Уравнение давления в камере, для упрощения принимаем что изменениям объема камеры из-за перемещения плунжера можно пренебречь:
Где: Q – расход в камеру, V — объем камеры.
Расход через дроссель:
Где: f– площадь дросселя, – давление в источнике, p – давление в камере. Уравнение дросселя не линейное, по условию задачи, давление входное изменяется скачком, от 0 до 200 бар, проведем линеаризацию в окрестности точки давления 100 бар тогда:
Подставляем линеаризованную формул расхода в формулу давления:
Таким образом общая система уравнений в форме Коши, для рис 2.12.3 привода принимает вид:
Матрицы A, B, С, В для матричной формы системы уравнений принимают вид:
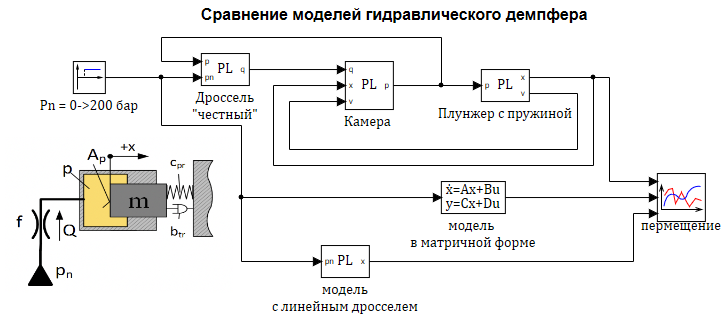
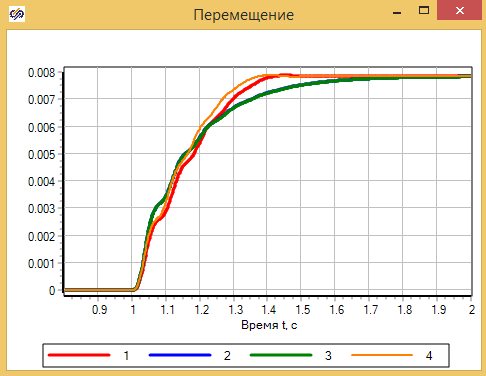
Проверим моделированием в SimInTech составленную модель. На рисунке 2.12.13 представлена расчетная схема содержащая три модели: 1 — «Честная» модель со всеми уравнениями без упрощений. 2 — Модель в блоке «Переменные состояние» (в матричной форме). 3 — Модель в динамическом блоке с линеаризованным дросселем.
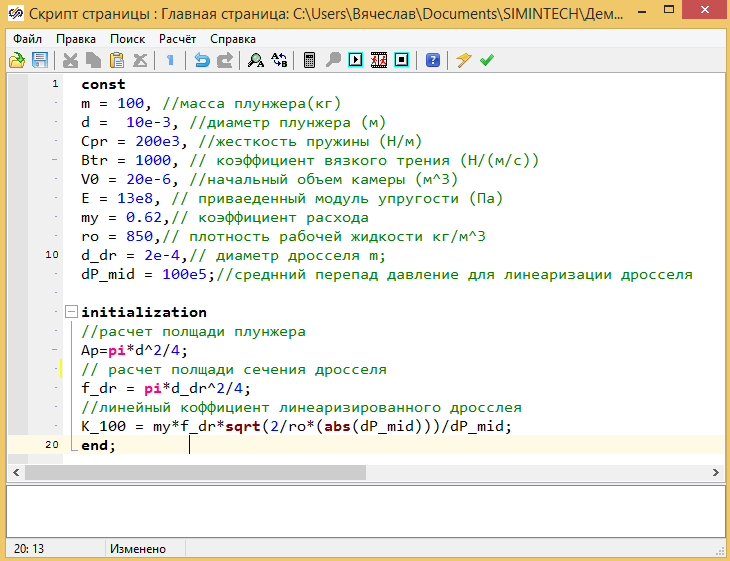
Все условия задачи задаются как глобальные константы проекта, в главном скрипте проекта, там же расчитываются на этапе инициализации расчета, площади плунжера и проходного сечения дросселя см. рис. 2.12.5:
Рисунок 2.12.5 Глобальный скрипт проекта.
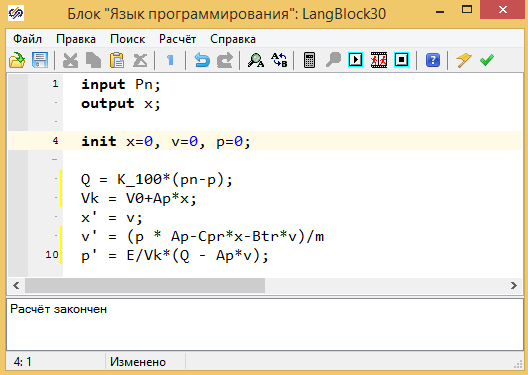
Модель на внутреннем языке программирования представлена на рис. 2.12.6. В данной модели используется описание модели в форме Коши. Так же выполняется учет изменения объема дросселя на каждом шаге расчета, за счет перемещения плунжера (Vk = V0+Ap*x.)
Рисунок 2.12.6 Скрипт расчета модели в форме Коши.
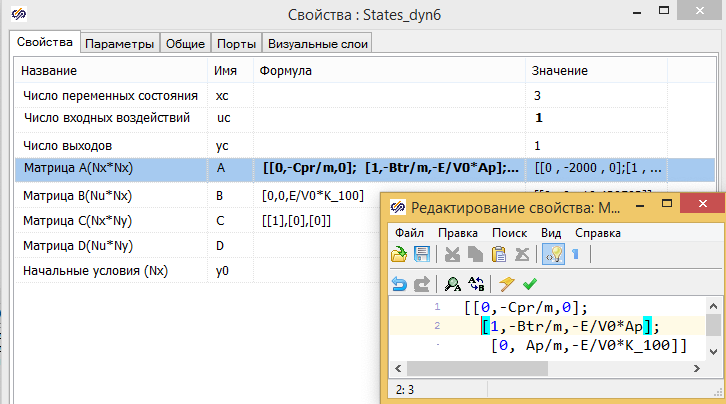
Модель в матричном форме задается с использованием глобальных констант в виде формул. (Матрица в SimInTech задается в виде последовательности из ее столбцов) см. рис. 2.12.7
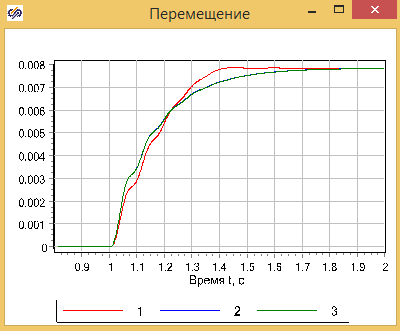
Результаты расчета показывают, что модель в матричной форме и модель на скриптовом языке в форме Коши, практически полностью совпадают, это означает, что учет изменения объема полости практически не влияют на результаты. Кривые 2 и З совпадают. Процедура линеаризация расхода через дроссель вызывает заметное отличие в результатах. 1-й график c «честной» моделью дросселя, отличается от графиков 2 и 3. (см. рис. 2.12.8)
Сравним полученные модели, с моделью созданной из библиотечных блоков SimInTech, в которых учитываются так же изменение свойств реальной рабочей жидкости — масла АМГ-10. Сама модель представлена на рис. 2.12.9, набор графиков на рисунке 2.12.10
На графиках видно, что уточненная модель отличается от предыдущих, однако погрешность модели составлят наших упрощенных моделей составляют примерно 10%, в лишь в некоторые моменты времени.
2.13. Переход от описания переменных «вход-выход» к переменным состояния и обратно
Рассмотрим несколько вариантов перехода от описания «вход-выход», к переменным состояния:
Вариант прехода зависит от правой части уравнения с переменными «вход-выход»:
2.13.1. Правая часть содержит только b0*u(t)
В этом варианте, в уравнениях в правой части отсутствуют члены с производными входной величины u(t). Пример с плунжером выше так же относится к этому варианту.
Что бы продемонстрировать технологию перехода рассмотрим следующее уровнение:
Для перехода к форме Коши ведем новые переменные:
И перепишем уравнение относительно y»'(t):
Используя эти переменные можно перейти от дифференциального уравнения 3-го прядка, к системе из 3-х уравнений первого порядка в форме Коши:
Соотвественно матрицы для матричного вида уравнений в переменных сосотяния:
2.13.2. Правая часть общего вида
Более сложный случай, когда в уравнениях есть производные от входных воздействий и уравнение в общем случае выглядит так:
Сделаем преобразования: перейдем к уравнениям динамики в изображениях:
Тогда можно представить уравнение в изображениях в виде:
Разделим уравнение в изображениях на произведение полиномов , получим:
Где: — некоторая комплексная величина (отношение двух комплексных величин). Можно считать, что отображение величины . Тогда входная величина может быть в изображениях представлена как:
Вренемся к оригиналу от изображений получим: , где: — дифференциальный оператор.
А это дифференциальное уравнение n-го порядка мы можем преобразовать к системе из n дифференциальных уравнений первого порядка, как это мы делали выше:
Таким образом, мы получили систему уравнение в форе Коши, относительно переменных состояния :
А регулируемую величину (выход системы) мы так же можем выразить через эти переменные, в изображениях:
Перейдем от изображения к оригиналам:
Если обозначить вектор , то мы получим уравнения переменных состояниях в матричной форме, где D = 0:
Пример:
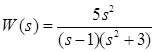
Рисунок 2.13.1 Передаточная функция.
Имеется передаточная функция (рис. 2.13.1) в изображениях :
Необходимо преобразовать передаточную функцию к системе уравнений в форме Коши
В изображения реакция системы связана с входным воздействие соотношением:
Разделим в последнем правую и левую часть на произведения , и введем новую перменную :
Полиномы N(s) и L(s) равны:
Перейдем в последнем выражении от изображения к оригиналам и ведем новые переменные (состояния):
Переходим от уравнения третьего порядка к системе трех уравнений первого порядка:
Или в матричной форме:
Для получения второго матричного уравнения воспользуемся соотношением для новых переменных в отображениях:
Перейдем от изображений к оригиналу:
Таким образом второе уравнение матричной системы выглядит так:
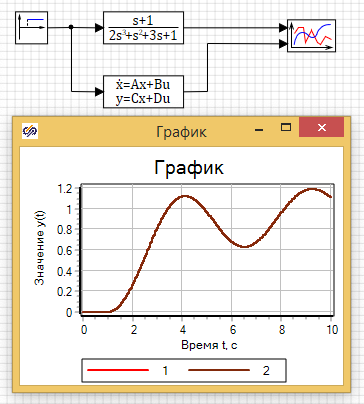
Проверим в SimInTech сравнив передаточную функцию и блок переменных состояния, и убедимся, что графики совпадают см. рис. 2.13.2
Рисунок 2.13.2 Сравнение переходного процеса у блока передаточной функции и блока переменных состояния.
Пример 6. Определить передаточную функцию объекта регулирования, модель которого задана дифференциальным уравнением
Введем в уравнение оператор Лапласа – s и вынесем yиu за скобки.
Делим многочлен правой части дифференциального уравнения на многочлен левой части, получаем выражение передаточной функции
.
Задания для самостоятельного выполнения
Задание 1. Составить структурную схему по дифференциальному уравнению объекта и определить передаточную функцию (по примерам 5 и 6)
1
3y (3) +6y (2) — 3y = u (2) — 2u (1) + u
10
3y (3) +3y (2) + 2y (1) -y = — 4u (1) + u
2
y (3) — 3y (2) + 2y (1) + 5y = 3u (2) + u
11
5y (3) — 5y = 3u (2) -2u (1) + u
3
-2y (3) + 4y (2) +2y (1) -5y = u (2) — 3u (1) + u
12
4y (3) -3y (2) + 6y (1) + 2y = 3u (2) -2u (1)
4
3y (3) — 4y (2) + 2y (1) =3u (2) — u (1)
13
12y (3) + 4y (2) + 3y (1) + 2y = 3 u
5
5y (3) — 7y (2) — 3y (1) = 2u (2) — u
14
6y (3) — 4y (2) +-2y (1) = 6u (2) — 3u (1) + u
6
-3y (3) + 4y (2) + 6y (1) + 5y = -3 u
15
8y (3) +3y (2) — 3y = -5u (2) — 3u (1) + u
7
2y (3) — 4y (2) + 5y = — 3u (1) + u
16
3y (3) + 3y (1) + 5y = 5u (2) +2u (1) + u
8
6y (3) -+y (2) -y (1) = — 3u (1) + u
17
-4y (3) + 4y (2) -2y (1) + 7y = 5 u
9
— 4y (2) + 3y (1) + 5y = — 2u (1) + u
18
3y (3) — 2y (2) — 3y (1) = u (2) — 4u (1) +2 u
Задание 2
Преобразовать структурную схему и определить эквивалентную передаточную функцию. Варианты заданий приведены в таблице 1. (смотреть примеры 1-4)
Таблица 1.1. Варианты заданий по теме «Структурные схемы»
Продолжение таблицы 1.1. Варианты заданий
Продолжение таблицы 1.1. Варианты заданий
Продолжение таблицы 1.1. Варианты заданий
Задание 3. (без вариантов заданий, общее). Записать в общем виде главную передаточную функцию системы (рис. 1.47).
ПРЕОБРАЗОВАНИЯ ЛАПЛАСА – теоретическая часть
Общие сведения
В ТАУ основным инженерным методом решения дифференциальных уравнений, т. е. исследования поведения систем во времени, является преобразование Лапласа. Его преимущество заключается в том, что операции дифференцирования и интегрирования оно заменяет более простыми алгебраическими операциями умножения и деления.
Рассмотрим принцип решения дифференциальных уравнений с помощью преобразования Лапласа.
1. На первом этапе производят прямое преобразование X ( s ) = L – от функции времени переходят к функции комплексной переменной Лапласа s = σ + jω = α + jβ.
Здесь ω = 2π f – это известная из электротехники круговая частота, рад/с.
2. Далее решают алгебраическое уравнение реакции, для чего находят собственные значения системы, т. е. корни характеристического уравнения D ( s ) = 0, и по теореме разложения определяют коэффициенты числителей простых дробей, на которые в соответствии с собственными значениями разлагается реакция.
3. В конце вычислений выполняют обратное преобразование Лапласа x ( t ) = L -1 – от функции переменной s возвращаются к функции переменной t.
Общее обозначение описанных операций x ( t )÷ X ( s ), где слева строчными буквами изображена функция времени (оригинал), справа, прописной буквой – функция комплексного переменного (изображение), а между ними стоит символ соответствия (ни в коем случае не равенства, что будет являться грубой ошибкой!).
Таблица 2. Таблица соответствия оригиналов и изображений
Оригинал x(t)
импульсная функция k ∙δ(t)
– простой нулевой корень
скачок k∙1(t) или просто k
– кратный нулевой корень
k ∙t n – степенной ряд от t
– простой действительный корень
– экспонента
– кратный действительный корень
, при n > 1
– сопряженные мнимые корни
k∙sinωt – гармоническая функция
– сопряженные мнимые корни
k∙cosωt – гармоническая функция
сопряженные комплексные корни
, объединенные в одну дробь ,
а) предпочтительная форма б) через синус в) через косинус
сопряженные комплексные корни
перед d ставят плюс, если знаки мнимых частей изображения в числителе и знаменателе совпадают (как показано), и минус в противном случае
Закон изменения выходного сигнала обычно является функцией, которую необходимо найти, а входной сигнал, как правило, известен.
Некоторые типовые входные и их изображения:
единичное ступенчатое воздействие имеет изображение X ( s ) = ,
дельта-функция X ( s ) = 1,
линейное воздействие X(s) = .
Пример. Решение ДУ с использованием преобразований Лапласа.
Допустим, входной сигнал имеет форму единичного ступенчатого воздействия, т.е. x(t) = 1. Тогда изображение входного сигнала, согласно таблице 2, имеет вид X(s) = .
Производим преобразование исходного ДУ по Лапласу и подставляем X(s):
Оригинал полученной функции отсутствует в таблице оригиналов и изображений. Для решения задачи его поиска дробь разбивается на сумму простых дробей с учетом того, что знаменатель может быть представлен в виде s ( s + 2)( s + 3):
= = — + .
Теперь, используя табличные функции (см. табл. 2), определяется оригинал выходной функции:
y(t) = 2 — 4 . e -2 t + 2 . e -3 t .
При решении ДУ с использованием преобразований Лапласа часто встает промежуточная задача разбиения дроби на сумму простых дробей. Существуют два пути решения этой задачи:
— путем решения системы уравнений относительно коэффициентов числителей,
— путем расчета коэффициентов числителей по известным формулам.
Общий алгоритм разбиения дроби на сумму простых дробей:
шаг 1 –определяются корни знаменателяsi(знаменатель дроби приравнивается к нулю и решается полученное уравнение относительноs);
шаг 2 –каждому корню ставится в соответствие простая дробь вида , где М i – неизвестный коэффициент; если имеет место кратный корень с кратностью n , то ему ставится в соответствие n дробей вида ;
шаг 3 –определяются коэффициенты ki по одному из вариантов расчета.
 ; б)
; б) .
. .
. .
. .
. , то получается уравнение Y(s) = WF(s).F(s). Структурная схема объекта приведена на рис. 1.
, то получается уравнение Y(s) = WF(s).F(s). Структурная схема объекта приведена на рис. 1.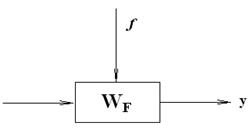
 .
. , корни которого:
, корни которого: ,
,  и
и  .
. .
. .
. и
и  ,
,
 ,
, .
. и
и  .
.
 , получим:
, получим: , тогда:
, тогда: .
.
 .
.
 ;
; .
. .
.
 ;
; — по заданию;
— по заданию; — по ошибке;
— по ошибке; — по возмущению.
— по возмущению.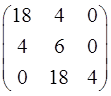

 — постоянные времени;
— постоянные времени;  — коэффициент усиления.
— коэффициент усиления.






 — единичное ступенчатое воздействие.
— единичное ступенчатое воздействие.



 тогда в изображениях получаем что:
тогда в изображениях получаем что:

 на ступенчатое воздействие, рассчитывается так:
на ступенчатое воздействие, рассчитывается так:


 — значение отклика по завершению предыущего импульса;
— значение отклика по завершению предыущего импульса;  — время завершения текущего импульса;
— время завершения текущего импульса;  — значение весовой функции в начале текущего импульса.
— значение весовой функции в начале текущего импульса.



 — вспомогательное время
— вспомогательное время запишем выражение изображения для отклика в операторной форме:
запишем выражение изображения для отклика в операторной форме:




 — вектор входа (или вектор управления);
— вектор входа (или вектор управления);  — вектор столбец производных переменных состояния;
— вектор столбец производных переменных состояния;  — вектор столбец переменных состояния;
— вектор столбец переменных состояния;  — вектор выхода;
— вектор выхода;  — собственная матрица системы [n x n],
— собственная матрица системы [n x n],  — постоянные коэффициенты;
— постоянные коэффициенты;  — матрица входа [n x m],
— матрица входа [n x m],  — постоянные коэффициенты;
— постоянные коэффициенты;  — матрица выхода а [p x n],
— матрица выхода а [p x n],  — постоянные коэффициенты;
— постоянные коэффициенты;  — матрица обхода [p x m],
— матрица обхода [p x m],  — постоянные коэффициенты;
— постоянные коэффициенты;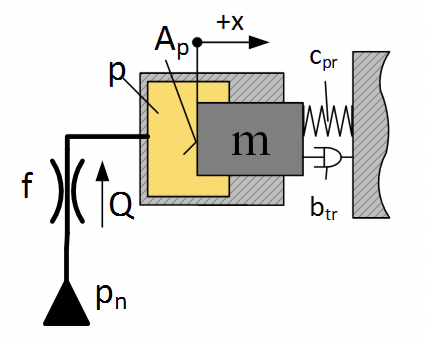

 – площадь плунжера,
– площадь плунжера,  – жесткость пружины,
– жесткость пружины,  – коэффициент вязкого трения, p – давление в камере.
– коэффициент вязкого трения, p – давление в камере. , тогда
, тогда 



 – давление в источнике, p – давление в камере.
– давление в источнике, p – давление в камере. 













 , получим:
, получим:
 — некоторая комплексная величина (отношение двух комплексных величин). Можно считать, что
— некоторая комплексная величина (отношение двух комплексных величин). Можно считать, что  . Тогда входная величина может быть в изображениях представлена как:
. Тогда входная величина может быть в изображениях представлена как:
 ,
,  — дифференциальный оператор.
— дифференциальный оператор.

 :
:


 , то мы получим уравнения переменных состояниях в матричной форме, где D = 0:
, то мы получим уравнения переменных состояниях в матричной форме, где D = 0:


 , и введем новую перменную
, и введем новую перменную  :
:









 .
.




 – экспонента
– экспонента
 , при n > 1
, при n > 1

 , объединенные в одну дробь
, объединенные в одну дробь  ,
,
 б) через синус
б) через синус  в) через косинус
в) через косинус 
 перед d ставят плюс, если знаки мнимых частей изображения в числителе и знаменателе совпадают (как показано), и минус в противном случае
перед d ставят плюс, если знаки мнимых частей изображения в числителе и знаменателе совпадают (как показано), и минус в противном случае ,
, .
.
 .
. .
. =
=  =
=  —
—  +
+  .
. , где М i – неизвестный коэффициент; если имеет место кратный корень с кратностью n , то ему ставится в соответствие n дробей вида
, где М i – неизвестный коэффициент; если имеет место кратный корень с кратностью n , то ему ставится в соответствие n дробей вида  ;
;