Лекция №7. МЕХАНИЧЕСКИЕ КОЛЕБАНИЯ
5.1. Свободные гармонические колебания и их характеристики.
Колебания − это движения или процессы, обладающие той или иной степенью повторяемости во времени. Колебания называются периодическими, если значения физических величин, изменяющихся в процессе колебания, повторяются через равные промежутки времени. Наиболее важными характеристиками колебания являются: смещение, амплитуда, период, частота, циклическая частота, фаза.
Простейший вид периодических колебаний − это гармонические колебания. Гармонические колебания − это периодическое изменение во времени физической величины, происходящее по закону косинуса или синуса. Уравнение гармонических колебаний имеет вид

1) Смещение x − это величина, характеризующая колебания и равная отклонению тела от положения равновесия в данный момент времени.
2) Амплитуда колебаний А − это величина, равная максимальному отклонению тела от положения равновесия.
3) Период колебаний T − это наименьший промежуток времени, через который система, совершающая колебания, снова возвращается в то же состояние, в котором она находилась в начальный момент, выбранный произвольно. Единица измерения [T] = 1 с .
За период система совершает одно полное колебание.
4) Частота колебаний ν − это величина, равная числу колебаний, совершаемых в единицу времени (за 1 секунду). Единица измерения [ν]= 1 Гц . Частота определяется по формуле
5) Циклическая частота ω − это величина, равная числу полных колебаний, совершающихся за 2π секунд. За единицу циклической частоты принята угловая частота, при которой за время 1 с совершается 2π циклов колебаний, [ω]= с -1 . Циклическая частота связана с периодом и частотой колебаний соотношением
6) Фаза колебаний ωt + φ0 − фаза указывает местоположение колеблющейся точки в данный момент времени.
7) Начальная фаза φ0 − указывает местоположение колеблющейся точки в момент времени t = 0 .
5.2. Сложение одинаково направленных и взаимно перпендикулярных гармонических колебаний.
Сложение нескольких колебаний одинакового направления можно изображать графически с помощью метода векторной диаграммы.
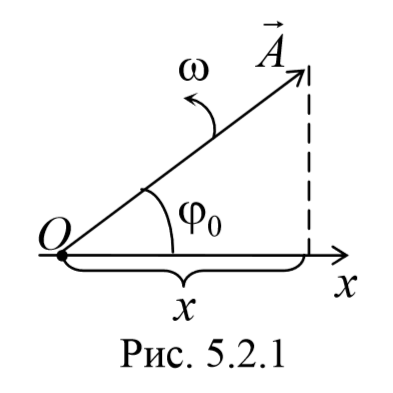
Гармоническое колебание может быть представлено графически с помощью вращающегося вектора амплитуды А . Для этого из произвольной точки O , выбранной на оси Ox , под углом φ0 , равным начальной фазе колебания, откладывается вектор амплитуды А . Модуль этого вектора равен амплитуде рассматриваемого колебания. Если этот вектор привести во вращение с угловой скоростью ω , равной циклической частоте колебаний, то проекция конца вектора амплитуды будет перемещаться по оси Ox и принимать значения от -A до +A , а колеблющаяся величина изменяться со временем по закону x = Acos(ωt + φ0)
1. Сложение одинаково направленных гармонических колебаний.
Сложим два гармонических колебания одинакового направления и одинаковой частоты. Смещение x колеблющегося тела будет суммой смещений x1 и x2 , которые запишутся следующим образом:

Представим оба колебания на векторной диаграмме. Построим по правилу сложения векторов результирующий вектор А . Проекция этого вектора на ось Ox равна сумме проекций слагаемых векторов x=x2+x2 , следовательно, вектор А представляет собой результирующее колебание. Определим результирующий вектор амплитуды А потеореме косинусов

Так как угол между векторами А 1 и А 2 равен φ=π-(φ2-φ1) , то cos[π-(φ2-φ1)]=-cos(φ2-φ1) , следовательно, результирующая амплитуда колебания будет равна

Определим начальную фазу результирующего колебания.
Из рисунка видно, что начальная фаза результирующего колебания
Таким образом, тело, участвуя в двух гармонических колебаниях одного направления и одинаковой частоты, также совершает гармонические колебания в том же направлении и с той же частотой.
2. Сложение взаимно перпендикулярных гармонических колебаний.
Рассмотрим результат сложения двух гармонических колебаний одинаковой частоты, происходящих во взаимно перпендикулярных направлениях. Допустим, что материальная точка совершает колебания как вдоль оси X , так и вдоль оси Y . Выберем начало отсчета времени так, чтобы начальная фаза первого колебания была равна нулю. Тогда уравнения колебаний примут вид

где φ − разность фаз обоих колебаний.
Уравнение траектории получим, исключив из уравнений (5.2.6) параметр времени t: cosωt= $$x\over A_1$$ , а sinωt= $$\sqrt<1-cos^2 ωt>=\sqrt<1-x^2\over A_1^2>$$ Разложим косинус во втором из уравнений (5.2.6)


Перепишем это уравнение в следующем виде

После преобразования, получим

Используя тригонометрическое тождество cos 2 φ+sin 2 φ=1 , окончательно получим
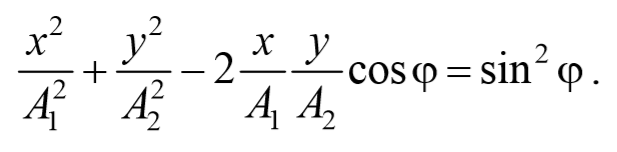
Это есть уравнение эллипса, оси которого ориентированы относительно координатных осей произвольно. Ориентация эллипса и величина его полуосей зависят от амплитуд колебаний и разности фаз.
Рассмотрим несколько частных случаев и определим форму траектории для них:
a) разность фаз равна нулю [φ=0]
В этом случае $$( < x\over A_1 >— < y\over A_2 >)^2=0$$ , откуда получается уравнение прямой
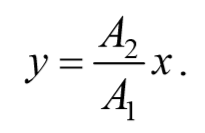
Результирующее движение является гармоническим колебанием вдоль этой прямой с частотой ω и амплитудой $$A= \sqrt
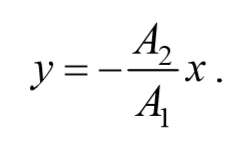
2) разность фаз равна ±π[φ=±π] .
В этом случае $$( < x\over A_1 >— < y\over A_2 >)^2=0$$ , откуда получается уравнение прямой
3) Разность фаз равна ± $$π\over 2$$ [φ=± $$π \over2$$ ] . Тогда
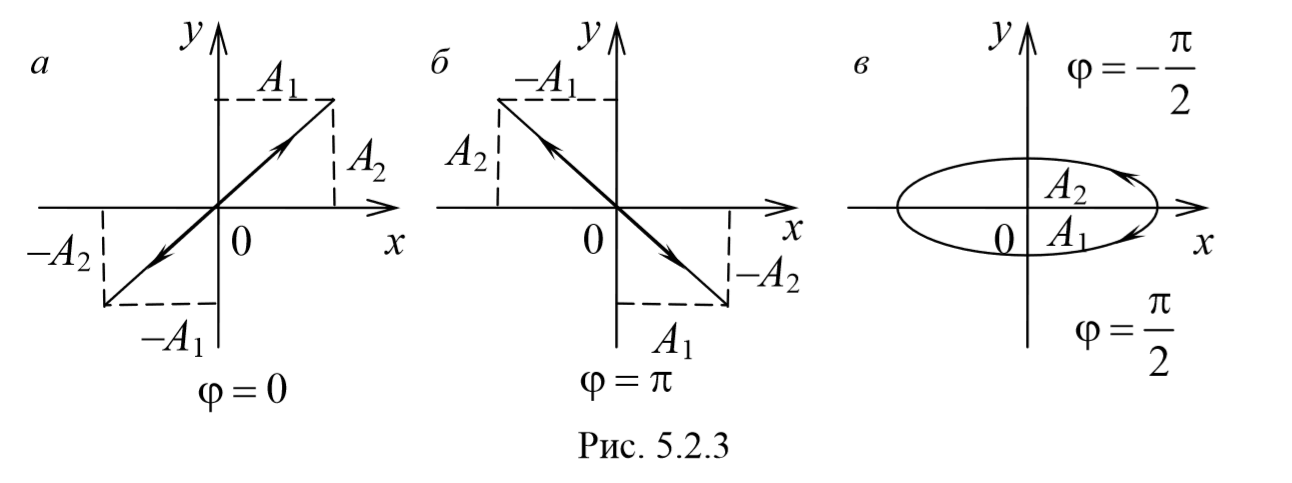
Уравнение эллипса, причем полуоси эллипса равны соответствующим амплитудам колебаний. При равенстве амплитуд колебаний эллипс вырождается в окружность. Случаи φ=+ $$π\over 2$$ и φ=- $$π\over 2$$ отличаются направлением движения. Если φ=+ $$π\over 2$$ , то уравнения колебаний имеют следующий вид: x=A1cosωt , и y=-A2sinωt и движение совершается по часовой стрелке. Если φ=- $$π\over 2$$ , , то уравнения колебаний имеют следующий вид: x=A1cosωt , и y=A2sinωt и движение совершается против часовой стрелке.
Рассмотренные три частных случая представлены на рис. 5.2.3, а, б, в. Рис
4) Если частоты складываемых взаимно перпендикулярных колебаний различны, то траектория результирующего движения имеет вид сложных кривых, называемых фигурами Лиссажу . Форма этих кривых определяется соотношением амплитуд, частот и разности фаз складываемых колебаний.
На рис. 5.2.4 показаны фигуры Лиссажу, которые получаются при соотношении частот 1:2 и различной разности фаз колебаний.
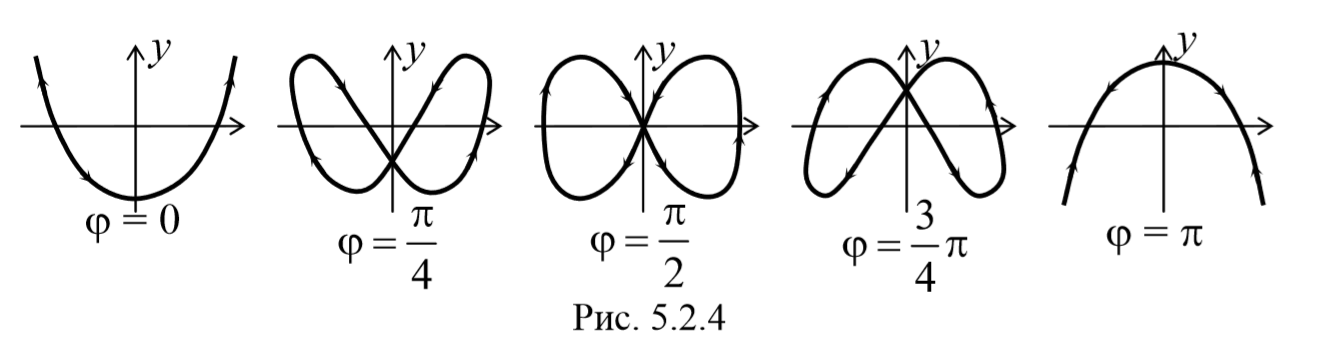
По виду фигур можно определить неизвестную частоту по известной частоте или определить соотношение частот складываемых колебаний.
5.3. Дифференциальное уравнение гармонических колебаний и его решение.
Продифференцируем по времени уравнение гармонических колебаний
и получим выражение для скорости
Из сравнения уравнений (5.3.1) и (5.3.2) следует, что скорость опережает смещение по фазе на π/2 . Амплитуда скорости равна Аω .
Продифференцировав уравнение (2) еще раз по времени, получим выражение для ускорения

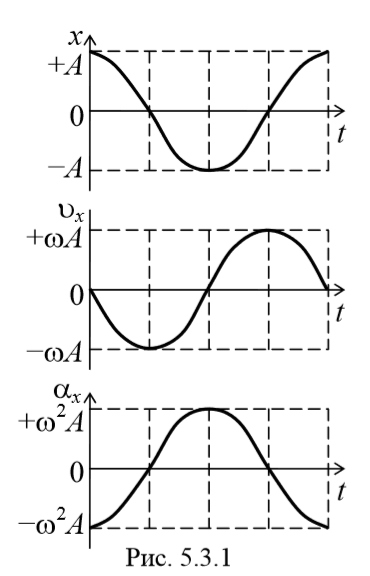
Как следует из уравнения (5.3.3), ускорение и смещение находятся в противофазе. Это означает, что в тот момент времени, когда смещение достигает наибольшего, положительного значения, ускорение достигает наибольшего по величине отрицательного значения, и наоборот. Амплитуда ускорения равна Аω 2 (рис. 5.3.1).
Из выражения (5.3.3) следует дифференциальное уравнение гармонических колебаний
Результирующая сила, действующая на материальную точку массой m , определяется с помощью второго закона Ньютона. Проекция этой силы

Эта сила пропорциональна смещению точки из положения равновесия и направлена в сторону противоположную этому смещению, т. е. она стремится вернуть точку в положение равновесия, и поэтому называется возвращающей силой . Таким образом, гармонические колебания происходят под действием силы F , пропорциональной смещению x и направленной к положению равновесия,
где k=mω 2 − постоянный коэффициент. Возвращающая сила подобна упругим силам, возникающим в телах при их деформации. Такая зависимость силы от смещения характерна для упругой силы, поэтому силы иной физической природы, удовлетворяющие зависимости (5.3.6) называются квазиупругими силами .
Материальная точка, совершающая колебания под действием квазиупругой силы, называется линейным осциллятором . Ее динамическое поведение описывается дифференциальным уравнением

ω0 − собственная частота осциллятора.
Решение этого уравнения дает закон движения линейного осциллятора x=Acos(ωt+φ0) .
5.4. Энергия гармонических колебаний.
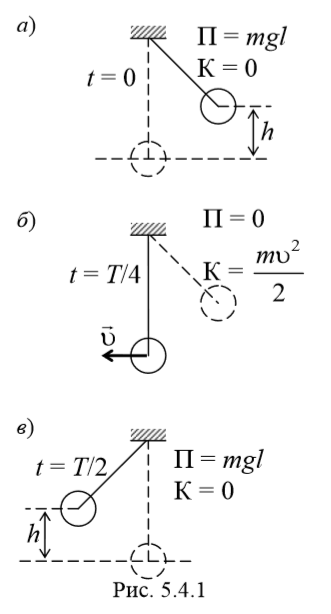
В процессе колебаний происходит превращение кинетической энергии в потенциальную энергию и обратно (рис. 5.4.1). В момент наибольшего отклонения от положения равновесия полная энергия состоит только из потенциальной энергии, которая достигает своего наибольшего значения. Далее при движении к положению равновесия потенциальная энергия уменьшается, при этом кинетическая энергия возрастает. При прохождении через положение равновесия полная энергия состоит лишь из кинетической энергии, которая в этот момент достигает своего наибольшего значения. Далее при движении к точке наибольшего отклонения происходит уменьшение кинетической и увеличение потенциальной энергии. И при наибольшем отклонении потенциальная опять максимальная, а кинетическая энергия рана нулю. И т. д.
Потенциальная энергия тела, совершающего гармонические колебания равна

Кинетическая энергия тела, совершающего гармонические колебания равна

Таким образом, полная энергия гармонического колебания, состоящая из суммы кинетической и потенциальной энергий, определяется следующим образом
Следовательно, полная энергия гармонического колебания
оказывается постоянной в случае гармонических колебаний.
Найдем среднее значение потенциальной энергии за период колебания
Аналогично получается для среднего значение кинетической энергии
Таким образом, и потенциальная, и кинетическая энергии изменяются относительно своих средних значений по гармоническому закону с частотой 2ω и амплитудой ωt kA 2
5.5. Пружинный, математический и физический маятники.
Рассмотрим несколько простейших систем, совершающих свободные гармонические колебания.
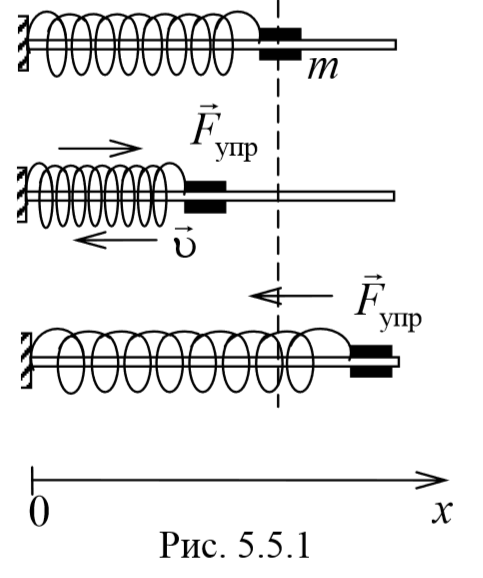
1) Пружинный маятник − это материальная точка массой m , подвешенная (или расположенная горизонтально) на абсолютно упругой пружине жесткостью k и совершающий гармонические колебания под действием упругой силы. Пусть шайба массой m , прикрепленная к пружине, совершает колебания. Для составления дифференциального уравнения колебаний запишем второй закон Ньютона в проекции на ось Ox Fупр=ma . Упругая сила Fупр=-kx . Приравнивая последние два уравнения и, используя определение ускорения тела, получим
Сравнивая уравнения (5.3.7) и (5.5.2) получаем, что пружинный маятник совершает гармонические колебания с частотой
Так как период колебаний определяется по формуле T= $$2π\over ω_0$$ , то период колебаний пружинного маятника
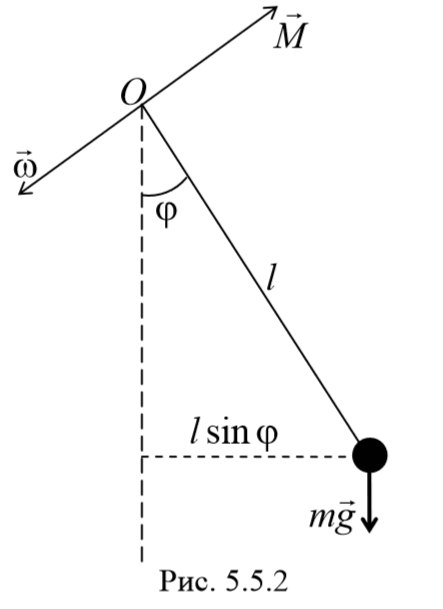
2) Математический маятник − это идеализированная система, состоящая из невесомой и нерастяжимой нити, на которой подвешена материальная точка массой m . Отклонение маятника от положения равновесия будем характеризовать углом φ , образованным нитью с вертикалью.
При отклонении маятника от положения равновесия возникает вращательный момент M , равный по величине mqlsinφ .Он имее акое же направление, что стремится вернуть маятник в положение равновесия. Следовательно, выражение для вращательного момента имеет вид: M=-mqlsinφ . Применим основно ательного движения
где L=ml 2 − момент инерции материальной точки. Тогда, учитывая, что угловое ускорение ε= $$d^2φ\over dt^2$$ , получим

Если рассматривать малые колебания, то sinφ≈φ . Получим
То есть при малых колебаниях угловое отклонение математического маятника изменяется по гармоническому закону с частотой
Период колебаний математического маятника
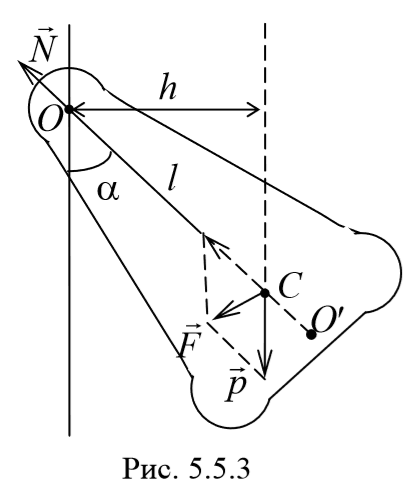
3) Физический маятник − это твердое тело, совершающее под действием силы тяжести колебания вокруг неподвижной оси, проходящей через точку, не совпадающую с центром масс тела. При отклонении маятника от положения равновесия на угол φ возникает вращательный момент, стремящийся вернуть маятник в положение равновесия. Этот момент равен M=-mglsinφ .
Согласно основному уравнению динамики вращательного движения получаем
где I − момент инерции маятника относительно оси, проходящей через точку подвеса.
Если рассматривать малые колебания, то sinφ≈φ . Получим
То есть при малых колебаниях угловое отклонение математического маятника изменяется по гармоническому закону с частотой
Период колебаний математического маятника
Из сопоставления формул периодов колебаний математического и физического маятников T=2π $$\sqrt
будет иметь такой же период колебаний, что и данный физический маятник.
Величина lпр (отрезок OO′) называется приведенной длиной физического маятника − это длина такого математического маятника, период колебаний которого совпадает с периодом данного физического маятника. Точка на прямой, соединяющей точку подвеса с центром масс, и лежащая на расстоянии приведенной длины от оси вращения, называется центром качания (О′) физического маятника. Точка подвеса О и центр качания обладают свойством взаимности: при переносе точки подвеса в центр качания прежняя точка подвеса становится новым центром качания.
Свободные гармонические колебания
Вы будете перенаправлены на Автор24
В физике колебаниями считают не только повторяющиеся периодически процессы, но и другие изменения состояния, которые повторяются во времени.
Систему, совершающую колебания называют колебательной.
Колебательные процессы классифицируют в зависимости от разных признаков, например, по физической природе процесса или механизма его возникновения. Так деление колебаний происходит на:
- механические;
- электромагнитные;
- электромеханические (смешанные);
- иногда выделяют квантовые колебания.
Колебания считают периодическими, если значения всех изменяющихся физических параметров, при помощи которых описывают состояние системы, повторяются спустя равные промежутки времени.
Важным с точки зрения математического и физического описания является деление колебаний на:
Свободными называют колебания, происходящие в отсутствии внешних воздействий на систему, совершающую колебания. Они появляются в результате однократного (при $t=0$) действия на колебательную систему, которое выводит ее из состояния равновесия.
Вынужденными считают колебания, которые возникают в результате регулярного внешнего действия на колебательную систему.
Колебания какой-либо величины называют гармоническими, если ее изменение во времени описывают при помощи законов синуса или косинуса, например:
$l=A\cos (\omega t+\delta)(1)$,
где $A=const$ — амплитуда колебаний.
Гармонически изменяющаяся величина удовлетворяет дифференциальному уравнению вида:
которое называют дифференциальным уравнением гармонических колебаний.
Свободные механические гармонические колебания
Допустим, что материальная точка гармонически колеблется параллельно оси $OX$ рядом с положением равновесия (начало координат разместим в нем). В этом случае связь координаты и времени можно задать уравнением:
$x=A\sin (\omega t+\varphi_0)(3),$
где $\varphi_0$ — начальная фаза колебаний точки.
Скорость движения по оси $OX$ нашей точки получим дифференцированием функции $x(t)$ по времени:
Готовые работы на аналогичную тему
где $v_0=A\omega$ — является амплитудой скорости.
Ускорение материальной точки в рассматриваемом нами случае определим как:
где амплитуда ускорения точки равна $a_m=A\omega^2$.
Из закона Ньютона, учитывая выражение для ускорения (5) мы видим, что на материальную точку массы $m$ действует сила, равная:
$F_x=ma_x=-m a_m\sin (\omega t+\varphi_0)=-m \omega^2x(6).$
Уравнение (6) указывает на то, что сила, действующая на материальную точку, прямо пропорциональна ее смещению от положения равновесия и имеет направление в сторону равновесия:
$\vec F=-m\omega^2 x\vec i$,
где $\vec i$ орт оси $OX$.
Зависимость вида (6) для силы, свойственна для сил упругости. Силы, обладающие другой природой (не силы упругости), но подчиняющиеся зависимости (6) именуют квазиупругими.
Кинетическая энергия свободных гармонических прямолинейных колебаний равна:
$E_k=\frac<1><2>mv^2=\frac<1><2>m \omega^2 A^2\cos^2 (\omega t+\varphi_0)= \frac<1><4>m \omega^2 A^2(\cos (2\omega t+2\varphi_0)) (7).$
При свободных гармонических колебаниях изменение кинетической энергии материальной точки происходит периодически и минимальное ее значение равно нулю, а максимальное $E_k max=\frac<1><2>m \omega^2 A^2$.
Частота колебаний кинетической энергии равна $2\omega$.
Потенциальную энергию колебаний материальной точки под воздействием потенциальной силы найдем как:
$U=-\int_0^x F_x dx=\frac<1><2>m\omega^2 x^2=\frac<1><2>m \omega^2 A^2\sin (\omega t+\varphi_0)= \frac<1><4>m \omega^2 A^2(\cos (2\omega t+2\varphi_0+\pi)) (8).$
Согласно полученному уравнению (8) изменение потенциальной энергии по гармоническому закону происходит с частотой $2\omega$. При этом минимальная ее величина в состоянии равновесия равна нулю, максимальная составляет $\frac<1><2>m \omega^2 A^2$.
Колебания потенциальной и кинетической энергий идут в противофазе, то есть сдвиг между их колебаниями составляет $\pi$.
При свободных гармонических колебаниях полная механическая энергия материальной точки сохраняется:
$E=E_k+U=\frac<1><2>m \omega^2 A^2=const.$
Свободные электромагнитные колебания
Свободные электрические колебания можно реализовать в идеальном колебательном контуре, который состоит из:
- конденсатора, емкость которого равна $C$;
- катушки индуктивности ($L$).
Элементы в контуре соединены последовательно. Контур будем считать идеальным, поскольку его сопротивление равно нулю. Только в таком контуре можно создать незатухающие свободные колебания.
Конденсатор заряжают, после этого замыкают на катушку. При замыкании в контуре возникают свободные колебания заряда конденсатора и силы тока в катушке. Изменяющееся электромагнитное поле распространяется в пространстве (скорость распространения равна скорости света). Обычно контур считают малым, при этом в каждый момент времени сила тока во всех его частях одинакова. Данный ток считают квазистационарным.
Свободные электрические колебания в рассматриваемом контуре будут гармоническими только, если сопротивление контура можно считать равным нулю.
Дифференциальное уравнение свободных колебаний заряда можно представить:
Величина $\frac<1>
Решением уравнения (9) является функция $q(t)$, равная:
$q(t)=q_0\sin (\omega t \varphi_0)(10)$,
где $q_0$ — амплитуда заряда конденсатора; $\varphi_0$ — начальная фаза колебаний заряда на конденсаторе.
Принимая во внимание, что связь заряда и силы тока:
получим закон $I(t)$ при свободных гармонических колебаниях:
$I=I_0\cos (\omega t+\varphi_0) = I_0\sin (\omega t+\varphi_0+\frac<\pi><2>) (12),$
где $I_0=\omega q_0=\frac
Сравнение выражений (10) и (12) указывает на то, что ток в контуре опережает по фазе заряд на $\frac<\pi><2>$.
При свободных гармонических колебаниях в нашем контуре, в рамках одного периода колебаний, происходит переход энергии электрического поля конденсатора ($E_e$) в энергию магнитного поля катушки (E_m) и назад:
Закон сохранения в виде (13) указывает нам на то, что полная энергия электромагнитных колебаний в идеальном контуре постоянна во времени.
Получи деньги за свои студенческие работы
Курсовые, рефераты или другие работы
Автор этой статьи Дата последнего обновления статьи: 22 05 2021
Дифференциальное уравнение свободных колебаний
Для изучения любого физического явления необходима модель. Моделью для изучения механических колебаний является гармонический осциллятор.
Гармоническим осциллятором называется система, совершающая колебания, которые могут быть описаны дифференциальным уравнением свободных гармонических колебаний, имеющим вид:
 . (19.5)
. (19.5)
Выражение (19.5) является линейным однородным дифференциальным уравнением второго порядка. Согласно общей теории линейных дифференциальных уравнений, решением уравнения (19.5) является выражение (19.1).
Колебания гармонического осциллятора являются важным примером периодического движения. Примерами гармонического осциллятора являются пружинный, математический и физический маятники.
Пружинный маятник — Пружинный маятник тело, подвешенное на пружине жесткостью k.Модель пружинного маятника показана на рис.19.1. Положение тела, при котором пружина не деформирована, является положением устойчивого равновесия. При отклонении тела от положения равновесия в результате деформации возникает сила упругости, которая согласно закону Гука равна  .
. 
Свободные колебания совершаются за счет первоначально сообщенной энергии при последующем отсутствии внешних воздействий на колебательную систему.
 |
| Рис. 19.1 |
В случае пружинного маятника уравнение движения согласно второму закону Ньютона можно записать  . Делим на m, получим:
. Делим на m, получим:
 . (19.6)
. (19.6)
Учтем, что  , получим уравнение (19.5)
, получим уравнение (19.5)
Период колебаний пружинного маятника определяется как
 . (19.7)
. (19.7)
Потенциальная энергия пружинного маятника определяется как:
 . (19.8)
. (19.8)
Математический маятник. Математическим маятником называют подвешенный на тонкой нерастяжимой нити груз, размеры которого меньше длины нити, а масса больше массы нити.
Положение, в котором нить вертикальна – положение устойчивого равновесия. В положении устойчивого равновесия сила тяжести  уравновешена силой натяжения нити
уравновешена силой натяжения нити  , как показано на рис.19.2. При отклонении нити на угол α торавнодействующая сил тяжести и силы натяжения нити будет направлена к положению устойчивого равновесия.
, как показано на рис.19.2. При отклонении нити на угол α торавнодействующая сил тяжести и силы натяжения нити будет направлена к положению устойчивого равновесия.
 . (19.9)
. (19.9)
Если тело отпустить, то будем наблюдать свободные колебания. Во время колебаний можно считать, что меняется только координата х. Запишем проекцию равнодействующей силы на ось х
 . (19.10)
. (19.10)
При малых значениях a (a
4 о ) пренебрегаем движением вдоль оси y
 (19.11)
(19.11)
 |
| Рис.19.2. |
Из уравнения (19.10), учитывая (19.11) определим проекцию равнодействующей силы на ось х, которая согласно второму закону Ньютона равна
 ,
,
учтем, что  , получим
, получим

Уравнение гармонических колебаний математического маятника можно записать в дифференциальной форме
 . (19.12)
. (19.12)
Подставим значение  . Получим уравнение (19.5). Отсюда период математического маятника равен
. Получим уравнение (19.5). Отсюда период математического маятника равен
 , (19.13)
, (19.13)
где l – длина математического маятника.
Физический маятник. Физический маятник – твердое тело, совершающее под действием силы тяжести колебания вокруг неподвижной оси, не проходящей через центр масс. Ось вращения, которого, расположена выше центра масс (рис.19.3).
При колебаниях физического маятника, возникает вращающий момент  , который согласно основному уравнению динамики вращательного движения равен:
, который согласно основному уравнению динамики вращательного движения равен:
 , (19.14)
, (19.14)
где J – момент инерции,
ε – угловое ускорение,
l – расстояние между точкой подвеса и центром масс. Уравнение (19.14) можно записать в виде:  или
или  .
.
Принимая во внимание  или
или  .
.
Можно получить выражение периода колебаний физического маятника:
 , (19.15)
, (19.15)
где  — приведенная длина физического маятника. Приведенная длина, приравнивается длине математического маятника с таким же периодом колебаний.
— приведенная длина физического маятника. Приведенная длина, приравнивается длине математического маятника с таким же периодом колебаний.
 |
| Рис.19.3. |
Период колебаний физического маятника, следовательно, и его приведенная длина, немонотонно зависят от расстояния от точки подвеса до центра масс маятника. Это легко заметить, если в соответствии с теоремой Штейнера (4.7) момент инерции выразить через момент инерции относительно параллельной горизонтальной оси, проходящей через центр масс. Тогда период колебаний будет равен
 , (19.16)
, (19.16)
где J0 –момент инерции центра масс.
На практике значения низших собственных частот систем могут быть весьма малыми. Например, бельевая веревка, подвешенная на двух столбах, может в случае достаточного провисания совершать свободные колебания с частотой 1-2Гц. Колебания такого типа были обнаружены осенью 1959г. у проводов линии электропередачи, пересекавшей реку Северную, частота собственных колебаний была весьма низкой — около 1/8Гц. Провода диаметром 43мм, протянутые над рекой, были прикреплены к двум большим пилонам, расстояние между которыми превышало 1,6км. Было обнаружено, что когда ветер дул с небольшой силой, но в определенном направлении, возникали столь интенсивные низкочастотные колебания проводов, что эти провода, минимальное расстояние между которыми составляло 8,2м, входили в соприкосновение, вызывавшее короткое замыкание в системе электропередачи. (Была найдена вероятная причина этих колебаний, и в дальнейшем их удалось предотвращать путем покрытия тросов тонкой пластиковой лентой: благодаря этому изменялась геометрия поверхности, обтекаемой воздушным потоком).
Колебания проводов над рекой не представляют собой свободных колебаний, поскольку в этом случае пассивная система находилась под действием внешнего источника энергии — ветра. Однако характерно, что при решении этой проблемы инженерам, как обычно, потребовалась информация относительно значений собственных частот системы, близких к частоте наблюдавшихся колебаний.
18.3.Скорость и ускорение гармонических колебаний
Если материальная точка совершает прямолинейные гармонические колебания вдоль оси координат х около положения равновесия, принятого за начало координат тогда зависимость координаты х от времени t описывается уравнением (19.1). Скорость и ускорение a колеблющееся точки соответственно равны:
 , (19.17)
, (19.17)
и  , (19.18)
, (19.18)
т.е. имеем гармонические колебания с той же циклической частотой. Амплитуды скорости и ускоренияколебаний соответственно равны υmax = Аw и amax= Аw0 2 . Фаза скорости (19.17) отличается от фазы величины (19.1) на  , а фаза ускорения (19.18) отличается от фазы величины (19.1) на
, а фаза ускорения (19.18) отличается от фазы величины (19.1) на  . В момент времени, когда х=0скорость колеблющейся точки максимальна по величине и равна амплитуде скорости в моменты прохождения колеблющейся точки через положение равновесия. При максимальных смещениях (х =±А) скорость равна нулю. Вектор скорости всегда направлен в сторону движения.
. В момент времени, когда х=0скорость колеблющейся точки максимальна по величине и равна амплитуде скорости в моменты прохождения колеблющейся точки через положение равновесия. При максимальных смещениях (х =±А) скорость равна нулю. Вектор скорости всегда направлен в сторону движения.
Ускорение равно нулю при прохождении колеблющейся точки через положение равновесия и достигает максимального по величине значения, которое равно амплитуде ускорения, при максимальных смещениях колеблющейся точки. Вектор ускорения всегда направлен в сторону положения равновесия. Удаляясь от положения равновесия, колеблющаяся точка движется, замедлено, приближаясь к нему – ускоренно.
  |
  |
  |
| Рис.19.4. |
График гармонического колебания, который описывается уравнением (19.1), скорость гармонического колебания, описываемая уравнением (19.17), и ускорение (19.18) показаны на рис.19.4. Видно, что смещение, скорость и ускорение гармонически колеблющейся точки являются периодическими функциями от времени с одинаковыми периодами.
http://spravochnick.ru/fizika/garmonicheskie_kolebaniya/svobodnye_garmonicheskie_kolebaniya/
http://zdamsam.ru/a6998.html