Квазилинейное уравнение. Разрывные решения
Рассматривая линейное уравнение переноса, мы предполагали, что точное решение задачи является гладкой функцией, причем при построении разностных схем требовалась еще ее дифференцируемость нужное число раз. Сейчас мы будем изучать разрывные решения. Такие решения линейное уравнение переноса может иметь лишь в тех случаях, когда разрывы «заложены» в начальных или граничных условиях.
Рассмотрим теперь квазилинейные уравнения, т.е. такие, которые линейны относительно производных искомой функции, однако сама функция может входить в коэффициенты уравнения. Одним из таких уравнений является простейшее квазилинейное уравнение переноса:
 (2.44)
(2.44)
Это однородное уравнение, т.е. его правая часть равна нулю, что указывает на отсутствие поглощения или источников частиц (энергии). Пусть в начальный момент времени (t= 0) решение уравнения (2.44) задано в виде
 (2.45)
(2.45)
В уравнении (2.44) роль скорости переноса играет само решение U(x,t). Знак этой функции может быть произвольным, в том числе разным в различных частях расчетной области. Для простоты будем считать, U(x,t) > 0.
Представим уравнение (2.44) в ином виде. Рассмотрим на плоскости (х, t) семейство кривых, определяемых соотношениями
Вдоль каждой такой кривой функция U(x, t) является сложной функцией одной переменной t: U = U(x(t),t). Полная производная этой функции по t с учетом (2.44), (2.46)

Таким образом, функция Uостается постоянной вдоль каждой кривой (2.46). Значение Uопределяется начальным условием (2.45), взятым в некоторой точке (х0,0), через которую проходит кривая:
 (2.47)
(2.47)
Найдем теперь уравнение кривой (2.46), проходящей через точку (х0,0). С учетом (2.47) получаем уравнение  , которое легко интегрируется:
, которое легко интегрируется:
 (2.48)
(2.48)
Полученное соотношение определяет семейство прямых на плоскости. Функция Uне меняется вдоль каждой прямой этого семейства.
Прямые линии (2.48) называются характеристиками. Вдоль характеристик уравнения вырождаются в некоторые соотношения между дифференциалами функции, называемые соотношениями на характеристикахи имеющими в данном случае вид

Характеристики (2.48) квазилинейного уравнения (2.44), вообще говоря, не являются параллельными прямыми, как это было в случае линейного уравнения. Если переписать (2.48) в виде  , то заметим, что тангенс угла наклона характеристик равен 1/U0(x0). Таким образом, наклон характеристик может меняться в разных точках при t= 0. Поэтому, если функция U0 (х) монотонно возрастает, то наклон характеристик слева направо монотонно убывает (веер характеристик). В этом случае решение задачи (2.44), (2.45) однозначно определено, поскольку через каждую точку полуплоскости t > 0 проходит одна характеристика, которая переносит в эту точку начальное значение. Такой случай показан на рис. 2.14.
, то заметим, что тангенс угла наклона характеристик равен 1/U0(x0). Таким образом, наклон характеристик может меняться в разных точках при t= 0. Поэтому, если функция U0 (х) монотонно возрастает, то наклон характеристик слева направо монотонно убывает (веер характеристик). В этом случае решение задачи (2.44), (2.45) однозначно определено, поскольку через каждую точку полуплоскости t > 0 проходит одна характеристика, которая переносит в эту точку начальное значение. Такой случай показан на рис. 2.14.

Рис. 2.14. Характеристики квазилинейного уравнения при монотонном возрастании функции U0(x)
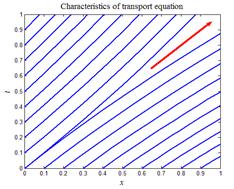
Рассмотрим теперь другой случай. Пусть функция U0(x) монотонно убывает (или является такой хотя бы на небольшом участке). Тогда наклон характеристик при движении слева направо увеличивается (рис. 2.15), что приведет к их пересечению. В точке пересечения решение не будет однозначным, поскольку каждая характеристика «принесет» в эту точку свое начальное значение. Поэтому в таких точках решение считается разрывным. Точки разрыва образуют линию разрыва в рассматриваемой области решения.

Рис. 2.15. Характеристики квазилинейного уравнения при монотонном убывании функции U0(x)
Различают два вида разрывов: слабые разрывы, когда терпят разрыв производные, и сильные разрывы – разрывы самого решения. Слабые разрывы в квазилинейном уравнении распространяются по характеристикам, сильные разрывы (в механике сплошных сред это обычно ударные волны) распространяются не по характеристикам. В точках разрыва производные не определены, поэтому уравнение теряет смысл. Следовательно, задачу нужно как-то доопределить, заменив в точках разрыва дифференциальные уравнения некоторыми конечными соотношениями.
Пусть x=φ(t) — уравнение линии разрыва, U– и U+ — значения решения соответственно слева и справа от точки разрыва, причем U– > U+(только в этом случае происходит пересечение характеристик). Тогда значения производной dx/dt=φ¢(t) на линии разрыва определяют по формуле
 (2.49)
(2.49)
Это соотношение на линии разрыва заменяет дифференциальное уравнение. Таким образом, решение задачи (2.44), (2.45), (2.49) надо искать в классе разрывных функций.
Перейдем к рассмотрению численных методов решения данной задачи. Они подразделяются на две основные группы: методы с выделением разрывов и методы сквозного счета.
Методы с выделением разрывов являются модификациями рассмотренных выше методов. Различие состоит в том, что во всей области решение ищут обычным способом, а в окрестности линий разрыва счет проводят нестандартным образом. При этом обычно требуется найти сначала точки разрыва, которые к тому же не являются расчетными узлами. Такой естественный способ нахождения разрывных решений отпугивает многих пользователей сложностью алгоритма.
Вметодах сквозного счетаразрыв не выделяется, и весь расчет проводится по единой схеме, что весьма выгодно при организации вычислений на компьютере. Разностные схемы, используемые для таких расчетов, называются однородными. Однако в этих схемах разрыв перестает быть разрывом при изменении решения в одной точке. Он растягивается на несколько расчетных узлов, «размазывается». Рассмотрим этот вопрос подробнее.
На рис. 2.16 изображено точное решение Uв некоторый момент времени (сплошная линия). В точке х0 имеется разрыв, причем для простоты значения функции слева (U–) и справа (U+) приняты постоянными. При использовании метода сквозного счета получили значения сеточной функции, отмеченные точками. Мы видим, что сеточная функция является монотонной (в данном случае она не возрастает).

Рис. 2.16. Разрывное решение
Схемы, которые сохраняют монотонность решения разностной задачи, называются монотонными разностными схемами. В теории разностных схем доказывается следующий необходимый и достаточный признак монотонности линейной схемы.
Теорема. Явная двухслойная разностная схема вида
 (2.50)
(2.50)
монотонна тогда и только тогда, когда  неотрицательные числа.
неотрицательные числа.
Можно также показать, что для линейного уравнения переноса такие схемы могут иметь только первый порядок точности. Схемы высших порядков точности не являются монотонными. На рис. 2.16 штриховой линией отмечено решение, которое может быть получено сквозным счетом с использованием схемы второго порядка. Здесь наблюдается нарушение монотонности сеточной функции.
«Размазывание» разрывов решения при переходе от дифференциальной задачи к аппроксимирующей ее разностной схеме объясняется наличием в схеме так называемой аппроксимационной вязкости. В частности, схемы (2.28), (2.35) первого порядка точности обладают аппроксимационной вязкостью, а схема второго порядка (2.37) ею не обладает. Понятие аппроксимационной вязкости применимо только для линейных разностных схем вида (2.50).
Одним из приемов, используемых для расчета разрывных решений в рамках нелинейных уравнений (в частности, квазилинейных), является введение понятия искусственной вязкости (или псевдовязкости).Этот прием позволяет превратить разрывные решения в непрерывные и при этом достаточно гладкие. С этой целью в исходное уравнение вводят малую добавку (возмущение), и разрывное решение может быть получено как предел введенного гладкого решения при стремлении к нулю параметра возмущения.
Итак, вместо исходного квазилинейного уравнения (2.44) рассмотрим уравнение
 (2.51)
(2.51)
Последний член в левой части, описывающий искусственную вязкость, при этом параметре, мал. Ясно, что при малом значении ε решения уравнений (2.44) и (2.51) при одинаковых начальных условиях будут близкими, если эти решения достаточно гладкие (вторая производная ограничена). Рассмотрим теперь разрывное решение исходной задачи (2.44), (2.45). Пусть это решение представляет собой ступенчатую функцию (см. рис. 2.16):
 (2.52)
(2.52)
 (2.53)
(2.53)
Это решение можно трактовать как ударную волну, движущуюся со скоростью а. При этом  — некоторые постоянные. Легко убедиться, в том, что функция (2.52) удовлетворяет как квазилинейному уравнению (2.44), так и соотношению (2.49), заменяющему на линии разрыва х = atдифференциальное уравнение.
— некоторые постоянные. Легко убедиться, в том, что функция (2.52) удовлетворяет как квазилинейному уравнению (2.44), так и соотношению (2.49), заменяющему на линии разрыва х = atдифференциальное уравнение.
Построим решение уравнения (2.51). Будем искать его в виде
 (2.54)
(2.54)
На это решение можно наложить асимптотическое условие, которое состоит в том, что вдали от разрыва решение  уравнения (2.51) и решение U(x,t) уравнения (2.44), являющиеся гладкими функциями, близки, т.е.
уравнения (2.51) и решение U(x,t) уравнения (2.44), являющиеся гладкими функциями, близки, т.е.
Подставим решение (2.54) в уравнение (2.51). При этом учтем, что функция f(x—at) является сложной функцией одного аргумента z= х — at. Ее производные


Подставив эти выражения в уравнение (2.51), получим следующее обыкновенное дифференциальное уравнение относительно искомой функции f(x — at):


Приравнивая к нулю каждый из сомножителей, получаем два значения функции f:
 (2.55)
(2.55)
Из значений (2.55) с учетом (2.52), (2.53) можно построить решение, напоминающее «размазанную» ударную волну (рис. 2.17), которое имеет вид


Рис. 2.17. Решение с искусственной вязкостью (t=0)
Получим гладкое решение, оно имеет даже кусочно непрерывную вторую производную. При малом ε зона перехода от U—кU+мала и решение близко к разрывному.
Таким образом, вместо нахождения разрывного решения задачи (2.44), (2.45), (2.49) можно искать непрерывное решение уравнения (2.51) при малых значениях ε. А это уравнение решается с помощью однородных разностных схем. В процессе решения следует обратить внимание на выбор шага h(а для неявных схем также τ), с тем, чтобы в области разрыва располагалось хотя бы несколько узлов.
Примером разностной схемы для уравнения (2.51) с искусственной вязкостью может быть следующая схема:

Упростив это выражение и разрешив его относительно неизвестного значения сеточной функции на (j + 1)-ом слое, получим
 (2.56)
(2.56)
Эта явная схема условно устойчива при выполнении неравенства

в котором роль скорости распространения возмущения а (для линейного уравнения) играет сама функция U. Разностная схема (2.56) пригодна для решения задач при наличии движущихся разрывов.
КВАЗИЛИНЕЙНЫЕ ГИПЕРБОЛИЧЕСКИЕ УРАВНЕНИЯ
- Егор Азарьев 4 лет назад Просмотров:
1 ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ «ЮЖНЫЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ» М. Ю. ЖУКОВ КВАЗИЛИНЕЙНЫЕ ГИПЕРБОЛИЧЕСКИЕ УРАВНЕНИЯ (учебное-методическое пособие) Ростов на Дону 2008
2 Жуков М. Ю. Квазилинейные гиперболические уравнения: Учебно-методическое пособие. Ростов на Дону, с. Пособие содержит теоретический и практический материал по применению метода характеристик для исследования квазилинейных гиперболических уравнений. Рассмотрены основные понятия, теория инвариантов Римана, интегральные законы сохранения, метод характеристик в случае одного уравнения и дано решение типовых примеров. Пособие содержит большое количество задач для самостоятельного решения и может быть использовано для проведения контрольных работ, зачетов, а также самостоятельной работы студентов. Предназначено для студентов естественных факультетов университета.
3 Оглавление Введение Гиперболические уравнения 5 2. Инварианты Римана Интегральные законы сохранения Метод характеристик для одного уравнения Автомодельные решения гиперболических уравнений Задача Коши для системы уравнений. Характеристики Задача о волновом фронте. Транспортное уравнение 41 Контрольные вопросы 49 3
4 Введение Теория квазилинейных гиперболических уравнений играет важную роль при описании линейных и нелинейных волн. Достаточно сказать, что именно квазилинейные гиперболические уравнения используются для математическом моделировании волновых движений жидкости, ударных волн и волн разрежения в газовой динамике, цунами, боры, перемещения ледников, лавин, селей, переноса массы электрическим полем, хроматографии, транспортных потоков и многих других физических процессов. Математические методы, используемые для решения квазилинейных гиперболических уравнений играют важную роль во многих разделах уравнений математической физики и занимают важное место в образовании студентов естественных факультетов. Цель этого пособия помочь студентам в усвоении некоторых важных разделов теории квазилинейных гиперболических уравнений таких, как инварианты Римана, интегральные законы сохранения и условия на разрывах, метод характеристик для одного уравнения. В пособии для одного уравнения рассмотрена также задача о распаде начального разрыва, описывается возникновение ударных волн, волн разрежения и их взаимодействие. Приведенные примеры и задачи позволят студентам использовать пособие не только для изучения метода, но и для самоконтроля. 4
6 Определение 1.4. Система (1.2) называется гиперболической в узком смысле в некоторой связной области D пространства переменных (x, t, u), если в каждой точке этой области выполнены условия: 1. Все собственные значения λ = λ i (x, t, u), i = 1. n матрицы A = A(x, t, u) вещественны и различны. В этом случае они могут быть упорядочены λ 1 0 некоторая константа. Запишем вектор u, матрицу A и систему в матричной форме ( ) ( ) ( ) ( ) ( ) u u u 1 u =, A =, + u 2 c 2 0 u 2 c 2 0 u 2 t x = 0. Собственные значения матрицы определяются уравнением ( ) λ 1 det A = det = λ 2 c 2 = 0. c 2 λ Тогда λ 1 = c, λ 2 = c. Таким образом, система (1.7) по определению (1.4) является гиперболической в узком смысле. Обратим внимание, что дифференцирование (1.7) дает u 1 tt u 2 xt = 0, u 2 tx c 2 u 1 xx = 0. Если функция u 2 дважды непрерывно дифференцируема, то u 2 xt = u 2 tx и для u 1 получится волновое уравнение u 1 tt c 2 u 1 xx = 0. 6
7 Пример 1.2. Уравнения одномерной изоэнтропической газовой динамики (или баротропной жидкости) записываются в виде ρ t + uρ x + ρu x = 0, ρ(u t + uu x ) = p x, p = p(ρ), (1.8) где ρ плотность, u скорость, p давление (известная функция плотности). Ведем вектор u и запишем систему в матричной форме ( ) ( ) ( ) ( ) ρ ρ u ρ ρ u =, + = 0. u u ρ 1 p (ρ) u u t Собственные значения матрицы определяются уравнением ( ) u λ ρ det A = det = (u λ) 2 p (ρ) = 0. ρ 1 p (ρ) u λ Если p (ρ) > 0, то x λ 1 = u p (ρ), λ 2 = u + p (ρ) и система (1.8) по определению (1.4) является гиперболической в узком смысле. Например, для идеального газа p(ρ) = c 2 ρ, где c > 0 скорость распространения звука в газе, имеем λ 1 = u c, λ 2 = u + c. При p (ρ) 8 В этом случае, «матрица» A = A(x, t, u) это просто функция и «собственное значение» будет λ = A(x, t, u). Таким образом, одно квазилинейное уравнение всегда является гиперболическим в узком смысле. Пример 1.4. Перенос массы электрическим полем в многокомпонентной смеси с нелинейными свойствами описывается системой ( c i µi c i ) t + = 0, i = 1. n, s = β k c k, 1 + s > 0. (1.10) 1 + s x где c i 0 концентрации компонент смеси, µ i = const подвижности компонент смеси в электрическом поле, 1 + s проводимость смеси, β i = const коэффициенты влияния компонент на проводимость. Подчеркнем, что β i могут быть как положительными так и отрицательными, но при этом проводимость смеси 1 + s > 0. Иными словами, система (1.10) рассматривается в некоторой ограниченной области пространства переменных (x, t, c 1. c n ), определенной неравенствами c i 0, 1 + s > 0. Заменой переменных c i = β i u i система (1.10) приводится к виду ( u i µi u i ) t + = 0, i = 1. n, s = 1 + s x k=1 u k, 1 + s > 0. (1.11) k=1 Здесь знак величин u i может быть произвольный. Приведем (1.11) к форме (1.3). Очевидно, что ( µi u i ) ( µi u i ) u j = 1 + s u j 1 + s x Вычислим матрицу A ij = u j x ( µi u i j=1 1 + s где δ ij дельта символ Кронекера. ) = µ iδ ij 1 + s µ iu i (1 + s) 2, (1.12) 8
9 Уравнение (1.4) для определения левых собственных векторов l и собственных значений λ примет вид или Введем обозначения < µi δ ij 1 + s µ iu i (1 + s) 2 >l i = λl j µ j l j 1 + s µ i u i l i (1 + s) = 2 λlj. (1.13) R = (1 + s)λ, H = Тогда (1.13) записывается в форме l j = µ i u i l i 1 + s. H µ j R. (1.14) Подставив l j в H при H 0, с учетом выражения для s выводим 1 + u i µ i u i = µ i R. Преобразовав это выражение, окончательно получим уравнение для определения R = R(u) и, следовательно, λ = R/(1 + s). 1 R = u i µ i R. (1.15) В случае, когда u i > 0, µ i > 0, i = 1. n и все µ i > 0 различны, решения уравнения вещественны (см. задачу 1.1) и система (1.11) является гиперболической в узком смысле. Задача 1.1. Показать, что корни уравнения (1.15) R = R k в случае, когда u i > 0 и 0 10 Задача 1.2. Рассмотреть уравнение (1.15) при n = 2 в области (1+s) > 0. Показать следующее: 1. При µ 1 µ 2 0 на плоскости (u 1, u 2 ) имеется область, в которой система (1.11) не является гиперболической. Задача 1.3. Уравнения мелкой воды. Рассмотреть уравнения, описывающие движение слоя воды по наклонной плоскости под действием силы тяжести h t + (hv) x = 0, (hv) t + ( hv ) 2 gh2 cos α = gh sin α kv 2, x где h(x, t) толщина слоя, v(x, t) скорость течения, g = const ускорение силы тяжести, α угол наклона плоскости к горизонту, k = const коэффициент трения слоя жидкости о плоскость. Являются ли эти уравнения гиперболическими в узком смысле? Задача 1.4. Будет ли система u 1 t + M(u 1, u 2 )u 1 x = 0, u 2 t + M(u 1, u 2 )u 2 x = 0 гиперболической (гиперболической в узком смысле)? Задача 1.5. Уравнения изотахофореза. Рассмотреть уравнения (ср. с примером 1.4) ( u i µi u i ) t + s где µ i = const и µ 1 0, Доказать, что при u i > 0 эти уравнения являются гиперболическими в узком смысле. Задача 1.6. Показать, что левые собственные вектора матрицы A являются правыми собственными векторами транспонированной матрицы A T. k=1 10
11 2. Инварианты Римана Гиперболическая система уравнений (1.2) или (1.3) путем умножением на левые собственные вектора приводится к эквивалентному виду l k (u t + λ k u x ) = l k b, k = 1. n (2.1) или в покомпонентной записи < u lk i i t + λ u i >k = x lkb i i, k = 1. n. (2.2) Определение 2.1. Система (2.1) или (2.2) называется характеристической формой записи системы (1.2) или (1.3). Определение 2.2. Система квазилинейных уравнений (1.2) или (1.3) называется системой в инвариантах Римана, если ее можно представить в виде R k R k + λ k t x = g k, k = 1. n, (2.3) где λ k = λ k (x, t, R) собственные значения матрицы A системы (1.2) или (1.3), g k = g k (x, t, R), R = (R 1. R n ). Величины R k называются инвариантами Римана. Замечание 2.1. Строго говоря, систему (2.3) можно рассматривать и независимо от исходной системы уравнений (1.2) или (1.3), имея ввиду частный случай квазилинейных уравнений. Для того, чтобы системы оказались связанными между собой необходимо существование зависимостей вида u = u(x, t, R) и R = R(x, t, u). Теорема 2.1. Достаточное условие существования инвариантов Римана. Пусть существуют такие R k, что R k (x, t, u) u i = µ k l i k, i, k = 1. n, (2.4) где µ k = µ k (x, t, u) некоторые множители. Тогда система уравнений (1.2) или (1.3) приводится к виду (2.3). 11
12 Замечание 2.2. Соотношения (2.4) представляют собой систему дифференциальных уравнений в частных производных. В случае n = 2 такая система всегда имеет решение и, следовательно, инварианты Римана существуют. Более точно, в случае n = 2 всегда можно найти множители µ 1, µ 2 (интегрирующие множители), такие, что система (2.4) разрешима. Замечание 2.3. Уравнения (2.4) определяют инварианты Римана с точностью до несущественных постоянных и с точностью до произвольных множителей. Действительно, если R k решение для множителей µ k, то величины a(r k + const) будут решениями для множителей aµ k. Пример 2.1. Пусть дана система (см. пример 1.1) u 1 t u 2 x = 0, u 2 t c 2 u 1 x = 0, (2.5) где c > 0 некоторая константа. Левые собственные вектора матрицы A A 11 = 0, A 12 = 1, A 21 = c 2, A 22 = 0 будут определяться соотношениями l 1 A 11 + l 2 A 21 = λl 1, l 1 A 12 + l 2 A 22 = λl 2. (2.6) Для λ 1 = c имеем cl 2 = l 1, l 1 = cl 2. С точностью до множителя, получим левый собственный вектор l 1 l 1 = (l 1, l 2 ) = (c, 1), λ 1 = c. Аналогично для λ 2 = c имеем cl 2 = l 1, l 1 = cl 2. С точностью до множителя, получим левый собственный вектор l 2 l 2 = (l 1, l 2 ) = ( c, 1), λ 2 = c. 12
13 Рассмотрим уравнения (2.4) R 1 u 1 = µ 1l 1 1, или, полагая µ 1 = µ 2 = 1 R 1 u 2 = µ 1l 2 1, R 2 u 1 = µ 2l 1 2, R 2 u 2 = µ 2l 2 2. (2.7) R 1 u 1 = l1 1 = c, R 1 u 2 = l2 1 = 1, R 2 u 1 = l1 2 = c, R 2 u 2 = l2 2 = 1. Легко проверить, что решением будет (с точностью до несущественных постоянных) R 1 = cu 1 + u 2, R 2 = cu 1 + u 2. (2.8) Очевидно, что u k можно выразить через инварианты Римана u 1 = R1 R 2 2c, u 2 = R1 + R 2. 2 Система (2.3), то есть система в инвариантах Римана, имеет вид R 1 t cr 1 x = 0, R 2 t + cr 2 x = 0. (2.9) Приведем также характеристическую форму записи системы (2.5). Используя выражения для собственных векторов и собственных значений, из (2.2) получим или l 1 k < u 1 t + λ k u 1 > < u + lk 2 2 x t + λ k u 2 >= 0 (2.10) x c(u 1 t cu 1 x) + (u 2 t cu 2 x) = 0, c(u 1 t + cu 1 x) + (u 2 t + cu 2 x) = 0. Заметим, что перегруппировав члены, с учетом (2.8) вновь получим (2.9) (cu 1 + u 2 ) t c(cu 1 + u 2 ) x = 0, ( cu 1 + u 2 ) t + c( cu 1 + u 2 ) x = 0. Пример 2.2. Рассмотрим уравнения из примера 1.2 при p(ρ) = c 2 ρ ( ) ( ) ( ) ( ) ρ ρ u ρ ρ u =, + = 0. u u c 2 ρ 1 u u t x 13
14 Собственные значения матрицы A 11 = u, A 12 = ρ, A 21 = c 2 ρ 1, A 22 = u будут (см. пример 1.2) λ 1 = u c, λ 2 = u + c. Для определения левых собственных векторов имеем (2.6) l 1 A 11 + l 2 A 21 = λl 1, l 1 A 12 + l 2 A 22 = λl 2. При λ 1 = u c получим l 1 u + l 2 c 2 ρ 1 = (u c)l 1, l 1 ρ + l 2 u = (u c)l 2. или l 2 cρ 1 = l 1, l 1 ρ = cl 2. Левый собственный вектор определяется с точностью до множителя. Полагая l 2 = k, получим l 1 = (l 1 1, l 2 1) = ( kcρ 1, k), λ 1 = u c. Чтобы записать l 2 при λ 2 соотношениях c на ( c) = u + c, достаточно заменить в полученных l 2 = (l 1 2, l 2 2) = (kcρ 1, k), λ 2 = u + c. Для нахождения инвариантов Римана имеем уравнения (2.7) или R 1 u 1 = µ 1l 1 1, R 1 ρ = µ 1( kcρ 1 ), R 1 u 2 = µ 1l 2 1, R 1 u = µ 1k, R 2 u 1 = µ 2l 1 2, R 2 ρ = µ 2kcρ 1, R 2 u 2 = µ 2l 2 2 R 2 u = µ 2k. Полагая µ 1 = k 1, µ 2 = k 1, имеем R 1 ρ = c ρ, R 1 u = 1, R 2 14 ρ = c ρ, R 2 u = 1.
15 Интегрируя, выводим выражения для инвариантов Римана R 1 = c ln ρ + u, R 2 = c ln ρ + u. Зависимость u = u(r) имеет вид ( R 2 R 1 ) ρ = exp, u = 1 2c 2 (R1 + R 2 ). Исходная система записывается в инвариантах Римана в форме (2.3) R 1 ( R 1 t + + R 2 ) R 1 c 2 x = 0, R 2 ( R 1 t + + R 2 ) R 2 + c 2 x = 0. Приведем также характеристическую форму записи (2.2) или (2.10) cρ 1 (ρ t + (u c)ρ x ) + (u t + (u c)u x ) = 0. Пример 2.3. Покажем, что уравнения (1.11) из примера 1.4 ( u i µi u i ) t + = 0, i = 1. n, s = u k, 1 + s > 0. (2.11) 1 + s приводятся к инвариантам Римана. x Рассмотрим уравнение (1.15) для определения собственных значений и запишем его в виде F (R) k=1 u i µ i R 1 R = 0. (2.12) Полагая R = R(u 1. u n ) и дифференцируя F (R) по u j, получим F (R) δ ij u j µ i R + u i R (µ i R) 2 u + 1 R j R 2 u = 0. j Для R/ u j, имеем R u j = < >u i (µ i R) R 2 µ j R. С учетом выражения (1.14) для левого собственного вектора, выводим < >R u = u i j µlj, µ = (µ i R) R 2 H. 15
16 Пусть R k корень уравнения (1.15) и λ k = R k /(1 + s) собственное значение матрицы (1.12). Тогда R k инвариантом Римана для (1.11), так как в этом случае R k u j = µlj k, µ k = < >u i (µ i R k ) (R k ) 2 H в точности совпадает с условием существования инвариантов Римана (2.4). Уравнения (2.3) в инвариантах Римана, соответствующие исходным уравнениям (2.11) имеют вид R k t + Rk R k 1 + s x = 0, k = 1. n, (2.13) Заметим, что величина s = u i, входящая в (2.13) должна быть выражена через инварианты Римана, то есть s = s(r 1. R n ). Иными словами, необходимы еще дополнительные преобразования для того, чтобы в (2.13) присутствовали лишь инварианты Римана. Умножая (2.12) на R n (µ k R), получим L(R) R k=1 u i n k=1,k i (µ k R) n (µ k R) = 0. (2.14) Понятно, что L(R) является полиномом степени n относительно переменной R. Пусть R k корни этого полинома. Тогда с точностью до множителя A полином можно представить в виде n L(R) A (R R k ). (2.15) k=1 Используя (2.14), легко записать коэффициенты полинома L(y)) при степенях y n и y 0 L(y) ( 1) n 1 y n k=1 ( u i ( 1) n y n + + = ( 1) n 1 (1 + s)y n ( ) n µ k y 0 = (2.16) k=1 ) n µ k y 0. k=1
17 Проводя аналогичные действия, из (2.15) имеем L(y) Ay n + + ( 1) n Ay 0 Сравнивая (2.16) и (2.17), выводим A = ( 1) n 1 (1 + s), (1 + s) ( 1) n A n R k = k=1 n R k. (2.17) k=1 n R k = k=1 n µ k. k=1 n µ k. (2.18) Используя (2.18), запишем уравнения (2.13) для инвариантов Римана в окончательном виде R k t + R k n R i k=1 n Rk = 0, k = 1. n. (2.19) x µ i Задача 2.1. Найти инварианты Римана для уравнений мелкой воды (см. задачу 1.3) h t + (hv) x = 0, (hv) t + ( hv ) 2 gh2 cos α = gh sin α kv 2. x Задача 2.2. Найти инварианты Римана для уравнений (см. задачу 1.4) u 1 t + M(u 1, u 2 )u 1 x = 0, u 2 t + M(u 1, u 2 )u 2 x = 0. Задача 2.3. Найти инварианты Римана для уравнений изотахофореза (см. задачу 1.5) ( u i µi u i ) t + s где µ i = const и µ 1 0, Задача 2.4. Пусть даны уравнений изотахофореза (см. задачу 1.5) ( u i µi u i ) t + = 0, i = 1. n, s = u k, s > 0. s x 17 k=1 k=1
18 Не определяя матрицу A, собственных значений и векторов, показать, что имеется инвариант Римана R = для которого выполнено уравнение u i µ i, R t = 0. Задача 2.5. Найти инварианты Римана для системы уравнений ( ) u u i i+1 t u 0 где β k некоторые константы. x n 1 = 0, i = 0. n 1, u n = β k u k, Задача 2.6. Рассматривая полиномы (2.14), (2.15) при R = µ s, показать, что u s cвязаны c инвариантами Римана (R 1. R n ) соотношениями u s = R k k=1 k=1, k s k=0 n n µ k (µ s R k ) k=1 k=1 n n, s = 1. n µ s (µ s µ k ) Заметим, что такая связь, позволяет, решив уравнения (2.19), получить решение уравнений (2.13). 18
19 3. Интегральные законы сохранения Определение 3.1. Соотношение (ψ i (x, t, u) dx ϕ i (x, t, u) dt) + σ i (x, t, u) dx dt = 0. (3.1) Γ которое должно выполняться для любого кусочно-гладкого контура Γ и ограниченной им односвязной области S, называется интегральным законом сохранения. Функции ψ i (x, t, u), ϕ i (x, t, u), σ i (x, t, u) считаются заданными. Из (3.1) при достаточной гладкости подынтегрального выражения и произвольности контура Γ следует S ψ i t(x, t, u) + ϕ i x(x, t, u) = σ i (x, t, u), i = 1. n. (3.2) Определение 3.2. Система уравнений (3.2) называется системой квазилинейных уравнений, записанных в консервативной форме. Введем обозначение ϕ i (x, t, u) u j = A ij (x, t, u), Тогда система записывается в виде (ср. с (1.3)) B ij (x, t, u) uj t + j=1 j=1 ψ i (u) u j = B ij (u). (3.3) A ij (x, t, u) uj x = σi (x, t, u), i = 1. n. (3.4) Если отказаться от требований гладкости подынтегрального выражения в (3.1) и рассматривать кусочно-разрывные функции u i, то из (3.1) следует условие на разрыве. Определение 3.3. Пусть имеется линия x = x(t) на которой функция u i (x, t) имеет разрыв первого рода, то есть u i (x(t + 0), t) u i (x(t 0), t). Вытекающие из (3.1) условия D[ψ i (u)] = [ϕ i (u)], i = 1. n, D = dx(t). (3.5) dt 19
20 называются условиями Рэнкина-Гюгонио на разрыве для системы уравнений (3.2). Здесь D называется скоростью движения линии разрыва, а символ [ ] означает величину разрыва соответствующей функции, например, для функции f(x, t) [f(x, t)] = f(x(t + 0), t) f(x(t 0), t). (3.6) Замечание 3.1. Для того, чтобы подчеркнуть на какой именно линии имеется разрыв, используется обозначение [f(x, t)] x=x(t) = f(x(t + 0), t) f(x(t 0), t). (3.7) Замечание 3.2. Уравнения (3.2) (или (3.4)) и условия на разрыве однозначно определяются интегральным законом сохранения (3.1). Если имеется квазилинейное уравнение вида (3.2), записанное в консервативной форме, и закон (3.1) неизвестен, то из вида уравнения (3.2) невозможно записать условие на разрыве для одного и того же уравнения (3.2) могут быть различные условия на разрыве. Пример 3.1. Пусть имеются два различных интегральных закона сохранения (ψ(u) dx ϕ(u) dt) = 0, ϕ(u) = 1 2 u2, ψ(u) = u. (3.8) и Γ (ψ(u) dx ψ(u) dt) = 0, ϕ(u) = 1 3 u3, ψ(u) = 1 2 u2. (3.9) Γ Из (3.8) имеем дифференциальное уравнение и условие на разрыве [ ] 1 u t + uu x = 0, D[u] = 2 u2. (3.10) Из (3.9) имеем дифференциальное уравнение и условие на разрыве [ ] [ ] 1 1 uu t + u 2 u x = 0, D 2 u2 = 3 u3. (3.11) Уравнения (3.10) и (3.11), фактически, совпадают, так как (3.11) можно сократить на u потери решения u = 0 при этом не произойдет. Условия на разрыве (3.10) и (3.11) отличаются друг от друга. 20
21 В случае (3.10) имеем В случае (3.11) имеем D = u 1 + u 2. (3.12) 2 D = 1 2 (u2 1 + u 1 u 2 + u 2 2). (3.13) Здесь u 1 = u(x(t 0), t), u 2 = u(x(t + 0), t). Таким образом, для одного и того же уравнения могут быть различные условия на разрыве. Задача 3.1. Записать уравнения и условия на разрыве для интегральных законов сохранения (3.1) в следующих случаях: 1. ψ i = u i, ϕ i = µ iu i s, σi = 0, s = u k. 2. ψ i = u i, ϕ i = µ iu i 1 + s, σi = 0, s = k=1 u k. k=1 21
22 4. Метод характеристик для одного уравнения Рассмотрим задачу Коши для одного (не системы) однородного квазилинейного уравнения, записанного в консервативной форме u t + ϕ x (u) = 0, 0, (4.1) где ϕ(u), ψ(x) заданные функции. Обозначим u t=0 = ψ(x), 23 Определение 4.1. Линия Γ, на которой решение уравнения (4.4) не изменяется, называется характеристикой, а уравнения (4.8) называются уравнениями характеристики. Из первого уравнения (4.8) следует, что t = τ с точностью до несущественной постоянной. Это означает, что в качестве параметра τ можно выбрать t, за исключением случая, когда характеристика будет прямой линией, параллельной оси x. Далее рассматривается только случай τ = t. Исходное уравнение (4.4) в частных производных первого порядка при помощи (4.7), (4.8) записывается в виде двух обыкновенных дифференциальных уравнений du(t) dt = 0, dx(t) dt = v(u(t)). (4.10) Переход от (4.4) к (4.10) удобно осуществлять, формально вводя оператор дифференцирования d dt = t + v x. (4.11) Действуя этим оператором (материальной производной) на u и x, с учетом уравнения (4.4) получим (4.10) du dt = u t + v u x = 0, dx dt = x t + v x x = v. Для того, чтобы учесть начальное условие (4.5) и получить задачу Коши для обыкновенных дифференциальных уравнений, потребуем выполнения для X начального условия где a некоторая константа. X(0) = a, (4.12) Уравнение dx/dt = v определяет семейство характеристик, а условие (4.12) задает характеристику, проходящую через точку a на оси x. Начальное условие (4.5) для функции u(x, t) запишем в виде Здесь учтено, что x t=0 = X(0) = a. U(0) = u(x, t) t=0 = ψ(x) t=0 = ψ(a). (4.13) 23
24 Таким образом, задача Коши (4.4), (4.5) для уравнения в частных производных первого порядка сводится к задаче Коши для системы двух обыкновенных дифференциальных уравнений du dt = 0, U(0) = ψ(a), dx dt = v(u), X(0) = a. (4.14) Заметим, что удобно не вводить новые обозначения U для функции u на линии Γ и X для x на линии Γ и записывать (4.14) в виде du dt = 0, u t=0 = ψ(a), (4.15) dx dt = v(u), x t=0 = a. (4.16) Система (4.15), (4.16) легко интегрируется. Из (4.15) имеем Подставляя (4.17) в (4.16), получим u = ψ(a). (4.17) dx dt = v(ψ(a)), x t=0 = a. (4.18) Интегрирование с учетом начального условия дает уравнение характеристики в неявной форме x = tv(ψ(a)) + a. (4.19) Пусть удалось, используя (4.19), представить a как функцию x, t x = tv(ψ(a)) + a a = a(x, t). (4.20) Тогда решение задачи (4.4), (4.5) при помощи (4.17), (4.20) записывается в виде u(x, t) = ψ(a(x, t)). (4.21) Замечание 4.1. Для достаточно гладких функций v(u) и ψ(u) из уравнения (4.19) при малых t всегда можно определить a(x, t). Однако, для произвольных x, t решение (4.19) является достаточно сложной задачей, во многих случаях не имеющей решения. Именно определение зависимости a = a(x, t) представляет основную трудность при реализации метода характеристик. 24
25 Пример 4.1. Методом характеристик построить решение задачи Коши u t + u u x = 0, u t=0 = x. (4.22) Вместо того, чтобы использовать (и помнить) готовые формулы, на практике удобнее действовать следующим образом. Введем оператор дифференцирования (4.11) d dt = t + u x. Действуя оператором на u, x, получим Поставим начальные условия du dt = 0, dx dt Решая задачу Коши (4.23), (4.24), получим Тогда a = a(x, t) = = u. (4.23) x t=0 = a, u t=0 = x t=0 = a. (4.24) u = a, x = ut + a = at + a. (4.25) x x, u(x, t) = a(x, t) = 1 t t 1. (4.26) Пример 4.2. Градиентной катастрофой называется ситуация, при которой в конечный момент времени t = t 0 производная u x решения задачи (4.4), (4.5) обращается в бесконечность, то есть u x (x, t 0 ) =, но u(x, t 0 ) ограничено. Используя (4.19), (4.21) можно получить условия возникновения градиентной катастрофы. Дифференцируя (4.19) и (4.21) по x, имеем Тогда a x = u x = ψ a (a)a x, 1 = tv u (ψ(a))ψ a (a)a x + a x. (4.27) tv u (ψ(a))ψ a (a), u x = Таким образом, если система уравнений ψ a (a) 1 + tv u (ψ(a))ψ a (a). (4.28) 1 + tv u (ψ(a))ψ a (a) = 0, x = tψ(a) + a (4.29) 25
26 имеет решение, то возможно возникновение градиентной катастрофы. Конечно, на самом деле, уравнения (4.29) неявным образом определяют некоторую линию на плоскости (x, t), на которой возможно обращение в бесконечность производной u x. Замечание 4.2. Уравнения (4.29) определяют линию, на которой возможно градиентная катастрофа, лишь для задачи (4.4), (4.5). В случае, когда уравнение (4.4) будет неоднородным, необходимо, действуя по аналогии с примером 4.2, искать условия обращения u x в бесконечность. Пример 4.3. Методом характеристик можно решать и задачи с неоднородными уравнениями. Пусть дана задача Коши на бесконечной прямой u t + u u x = u, u t=0 = ψ(x), 27 Можно ли представить решение в виде (4.35), если в уравнении (4.33) функция v будет v = v(x, t, u)? Как формула (4.35) согласуется с методом характеристик? Задача 4.2. Методом характеристик построить решение задачи Коши u t + u u x = 0, u t=0 = e x2, 0, (4.37) где θ(t) известная функция, x 0 задано. Введем оператор дифференцирования (4.11) u x=0 = θ(t), t > 0, (4.38) d dt = t + u x. Действуя оператором на u, x, получим Поставим краевое условие du dt = 0, dx dt = u. (4.39) t x=x0 = T, u x=x0 = θ(t) x=x0 = θ(t ). (4.40) Здесь T некоторая константа (точка на оси t, через которую проходит характеристика). Решая задачу (4.39), (4.40) для функции u, получим Тогда для определения x имеем задачу u = θ(t ). (4.41) dx dt = θ(t ), t x=x0 = T, (4.42) 27
28 Решая (4.42), выводим x x 0 = (t T ) θ(t ). (4.43) Если из (4.43) удастся определить T = T (x, t), то решением краевой задачи (4.37), (4.38) будет u(x, t) = θ(t (x, t)). (4.44) Задача 4.4. Методом характеристик построить решение задачи Коши u t + u u x = 0, u Γ = f(x, t) Γ, 0, (4.45) где f(x, t) известная функция, а линия Γ задана при помощи известной функции g(t) Γ = <(x, t) : x = g(t)>, t > 0. (4.46) Следует ли накладывать какие-либо ограничения, помимо требований гладкости, на функцию g(t), задающую линию Γ? Задача 4.5. Рассмотреть задачу 4.5 в случае уравнения u t + v(u) u x = 0 28
29 5. Автомодельные решения гиперболических уравнений Однородная система квазилинейных уравнений u t + A(u)u x = 0 (5.1) или, записанная для компонент, u i t + A ij (u)u j x = 0, i = 1. n (5.2) j=1 допускает частные решения, зависящие от комбинации переменных x, t. Введем величину z, называемую автомодельной переменной где x 0, t 0 некоторые константы. z = x x 0 t t 0, (5.3) Будем разыскивать решение уравнений (5.2) в виде Учитывая, что имеем u i (x, t) = u i (z), i = 1. n. (5.4) z t = x x 0 (t t 0 ) 2 = z t t 0, z x = 1 t t 0, (5.5) u i t = u i zz t = zui z, t t 0 u i z = u i zz x = ui z, t t 0 Подставляя в (5.2), выводим zu i z + A ij (u)u j z = 0, i = 1. n. (5.6) j=1 Таким образом, замена (5.3) позволяет свести уравнения в частных производных первого порядка к системе обыкновенных дифференциальных уравнений для функций, зависящих лишь от z. 29
30 Определение 5.1. Пусть дана система уравнений Решение вида (если оно существует) u t + A(u)u x = 0. (5.7) u = u(z), z = x x 0 t t 0 (5.8) называется автомодельным решением, а переменная z автомодельной переменной. Пример 5.1. Пусть имеется одно квазилинейное уравнение u t + u u x = 0. Ищем его решение в виде (5.4). Используя (5.5), получим (5.6) zu z + u u z = 0 или ( z + u) u z = 0. Очевидно, что имеется два решения. Первое решение u = const, соответствующее случаю u z = 0, является тривиальным, а второе решение u(x, t) = z = x x 0 t t 0 как раз и есть автомодельное решение уравнения. Пример 5.2. Пусть имеется одно квазилинейное уравнение Как и в примере 5.1, получим u t + v(u) u x = 0. zu z + v(u) u z = 0. Для нахождения автомодельного решения имеем алгебраическое уравнение, которое определяет автомодельное решение u(z) неявным образом v(u(z)) = z. Заметим, что во многих случаях, для анализа поведения решения u(z) удобно строить график функции z = v(u). 30
31 Из приведенных примеров видно, что для одного квазилинейного уравнения, по крайней мере, формальное построение автомодельного решения является простой задачей. Далее, ограничиваемся рассмотрением уравнений гиперболических в узком смысле (см. определение 1.4) и в случае системы (5.6) потребуем z = λ k (u), (5.9) где λ k (u) собственное значение матрицы A(u) для какого-либо фиксированного значения k. Тогда, вектор r k (u) = C k (u)(u 1 z. u n z ) T (5.10) является правым собственным вектором матрицы A, соответствующий собственному значению λ k (u). Множитель C k (u) возникает в связи с тем, что собственные вектора определены с точностью до множителя. Если собственный вектор r k (u) известен, то (5.9) можно записать в виде системы обыкновенных дифференциальных уравнений первого порядка du i (z) dz = C 1 k (u) ri k(u), i = 1. n. (5.11) Для определения C k (u) продифференцируем (5.9) по z λ k du i 1 = u i dz. (5.12) Используя (5.11), для определения C k (u), получим 1 = C 1 λ k k u i ri k(u). или C k = Окончательно (5.11) записывается в виде du i dz = j=1 r i k (u) λ k (u) u j λ k u i ri k(u). (5.13) r j k (u) 31, i = 1. n. (5.14)
32 Таким образом, система обыкновенных дифференциальных уравнений для нахождения автомодельных решений полностью определена. Замечание 5.1. Понятно, что на самом деле (5.14) в случае системы гиперболической в узком смысле определяет не одно автомодельное решение, а семейство из n автомодельных решения для различных индексов k. Определение 5.2. Решение системы (5.14) для фиксированного k называется волной разрежения индекса k (или k-ой волной разрежения). Определение 5.3. Система уравнений гиперболическая в узком смысле u t + A(u)u x = 0. (5.15) называется выпуклой по Лаксу, если для любых собственных значений λ k выполнены неравенства λ k (u) r j u j k (u) 0, k = 1. n. (5.16) j=1 Понятно, что выпуклость по Лаксу гарантирует определение ненулевого множителя C k (u) и возможность записи уравнений для нахождения автомодельных решений в виде (5.14). Пример 5.3. Найдем автомодельные решения для уравнений рассмотренных в примере 2.2 ( ) ρ u =, u ( ) ρ Собственные значения матрицы будут (см. примеры 1.2, 2.2) u t + ( ) ( ) u ρ ρ c 2 ρ 1 A 11 = u, A 12 = ρ, A 21 = c 2 ρ 1, A 22 = u u λ 1 = u c, λ 2 = u + c. Для определения правых собственных векторов имеем A 11 r 1 + A 12 r 2 = λr 1, A 21 r 1 + A 22 r 2 = λr u x = 0.
33 Уравнения линейно зависимы и достаточно рассмотреть одно из них, например, A 11 r 1 + A 12 r 2 = λr 1 или ur 1 + ρr 2 = λr 1. Подставляя собственные значения (верхний знак соответствует λ 1 ), имеем ur 1 + ρr 2 = (u c)r 1 ρr 2 = cr 1. Так как собственные вектора можно определять с точностью до множителя, то, выбирая r 2 = c, запишем r 1 = (r 1 1, r 2 1) T = ( ρ, c) T, r 2 = (r 1 2, r 2 2) T = (+ρ, c) T, Вычисляя производные λ k, получим λ 1 ρ = 0, λ 1 u = 1, λ 2 ρ = 0, λ 2 u = 1. Тогда λ 1 ρ r1 1 + λ 1 λ 2 u r2 1 = c 0, ρ r1 2 + λ 2 u r2 2 = c 0, Таким образом, система уравнений выпукла по Лаксу (см. определение 5.3). Для определения автомодельного решения (волны разрежения индекса k = 1) имеем уравнение (5.14) dρ dz = ρ c, du dz = c c = 1, λ 1 = u c = z. Аналогично, для волны разрежения индекса k = 2, получим Окончательно dρ dz = +ρ c, где A 1, A 2 некоторые константы. du dz = c c = 1, λ 2 = u + c = z. ρ = A 1 e z/c, u = z + c, λ 1 = u c, ρ = A 2 e +z/c, u = z c, λ 2 = u + c, 33
34 Пример 5.4. Пусть система гиперболических уравнений приводится к однородной системе, записанной в инвариантах Римана (см. (2.3)) R k t + λ k (R) Rk x = 0, k = 1. n, (5.17) Вводя автомодельную переменную (5.3) и производя замены аналогичные (5.5), запишем zr k z + λ k (R)R k z = 0, k = 1. n, (5.18) Для того, чтобы найти волну разрежения индекса m, потребуем λ m (R) = z. (5.19) Тогда ( λ m + λ k )R k z = 0, k = 1. n, (5.20) Если система является гиперболической в узком смысле, то все собственные значения λ различны и из (5.20) следует R k z = 0 R k = const, k m. (5.21) Инвариант Римана R m = R m (z) определяется из уравнения (5.19). Таким образом, m-ая волна разрежения определяется набором инвариантов Римана где R i = const, i m. R = (R 1. R m 1, R m (z), R m+1. R n ), (5.22) λ m (R 1. R m 1, R m (z), R m+1. R n ) = z, Пример 5.5. Рассмотрим систему (2.19) R k t + R k n R i n Rk = 0, k = 1. n. x µ i и найдем m-ую волну разрежения. 34
35 Используя результаты примера 5.4, имеем R k = const, k m. Для определения R m (z) имеем λ m = Тогда R k n R i n = z. µ i R m (z) = (β m z) 1/2, β m = n µ i n, i m R i = const. Задача 5.1. Найти автомодельное решение для уравнений (см. задачу 1.4 и 2.2) u 1 t + M(u 1, u 2 )u 1 x = 0, u 2 t + M(u 1, u 2 )u 2 x = 0. Задача 5.2. Найти автомодельное решение для уравнений изотахофореза (см. задачу 1.5 и 2.3) ( u i µi u i ) t + s x = 0, i = 1. n, s = u k, s > 0, где µ i = const и µ 1 0 некоторая константа, не имеет автомодельных решений. Задача 5.4. Дано уравнение u t + A(x, t, u)u x = b(x, t, u). Как функции A(x, t, u) и b(x, t, u) должны зависеть от переменных x, t для того, чтобы было возможно построить автомодельное решение? Тривиальный случай A(x, t, u) = A(u), b(x, t, u) = 0 не рассматривать. 35 k=1
36 Задача 5.5. Какой вид имеет условие выпуклости (см. определение 5.3 и формулу (5.16)) в случае одного квазилинейного уравнения? Что означает нарушение условия выпуклости (5.16) для одного квазилинейного уравнения? Будет ли уравнение ( ) u u t + = u 2 выпуклым по Лаксу? Можно ли для указанного уравнения построить автомодельное решение? x 36
37 6. Задача Коши для системы уравнений. Характеристики Рассмотрим постановку задачи Коши для системы гиперболических уравнений u t + A(x, t, u)u x = b(x, t, u) (6.1) Запишем эту систему в характеристической форме (2.1) l k (u t + λ k u x ) = l k b, k = 1. n (6.2) или в покомпонентной записи < u lk i i t + λ u i >k = x lkb i i, k = 1. n. (6.3) Рассмотрим окрестность некоторой линии Γ, задаваемой уравнениями x = x(τ), t = t(τ), x τ (τ) + t τ (τ) = 0, (6.4) Γ = <(x, t) : x = x(τ), t = t(τ), τ 1 τ τ 2 >. (6.5) Зададим на Γ функцию u(x, t) где ϕ(τ) известная функция. u Γ = u(x(τ), t = t(τ)) = ϕ(τ), (6.6) Определение 6.1. Условия (6.6) называются начальными, функция ϕ называется начальной функцией, кривая Γ начальной кривой. Задача (6.1), (6.6) называется задачей Коши для системы гиперболических уравнений. Замечание 6.1. На самом деле при постановке задачи Коши следует дополнительно указывать требования гладкости для A, b, u, ϕ и кривой Γ. В дальнейшем, в случае необходимости, такие требования будут формулироваться в каждом конкретном случае. 37
38 Предположим, что все входящие в (6.1), (6.6) функции достаточно гладкие и рассмотрим возможность определения по начальным данным на линии Γ производных u t, u x. Введем обозначения для производных u t Γ = q, u x Γ = p, (6.7) Дифференцируя начальные условия (6.6) по τ и рассматривая уравнение (6.2) в характеристической форме на линии Γ, запишем l k (q + λ k p) = l k b, k = 1. n, (x, t) Γ (6.8) dt(τ) dτ q + dx(τ) p = dϕ(τ) dτ dτ (6.9) или в покомпонентной записи ( lk i q i + λ k p i) = lkb i i = f k, k = 1. n, (6.10) dt dτ qk + dx dτ pk = dϕk, k = 1. n. (6.11) dτ Здесь f k обозначение для правых частей уравнений. Величины l k, b, λ k в соотношениях (6.8) (6.11) являются известными функциями переменной τ. Уравнения (6.10), (6.11) система 2n уравнений для определения 2n неизвестных q 1. q n, p 1. p n, т. е. производных функции u на линии Γ. Предположим, что dt/dτ 0 (см. задачу 6.1). Умножая (6.10) на dt/dτ и исключая при помощи (6.11) из уравнений величины q i dt/dτ, получим систему n линейных уравнений для определения p 1. p n ( dx dt l i k dτ + λ k dτ ) p i = dt dτ f k Определитель этой системы имеет вид n ( D(τ) = det(lk) i dx dτ + λ dt k dτ k=1 l i k dϕ i, k = 1. n. (6.12) dτ ). (6.13) Из гиперболичности уравнений (6.1), в соответствии с определением 1.3, следут det(lk i ), так как левые собственные вектора образуют базис. 38
39 Если выполнено условие ( dx dτ + λ k то система (6.12) имеет единственное решение. ) dt 0, k = 1. n, (6.14) dτ Таким образом, при выполнении условий (6.14) производные q, p определяются на линии Γ единственным образом. Замечание 6.2. При выполнении условий (6.14) и достаточной гладкости A, b, u, ϕ, дифференцируя (6.10), (6.11) по τ (такие системы называются дифференциальным следствием исходной системы), можно единственным образом получить вторые, третьи, четвертые и т. д. производные функции u на кривой Γ. Это означает, что задача Коши (6.1), (6.6) разрешима и имеет единственное решение. Рассмотрим ситуацию, когда для какого-либо k, для определенности, k = m, условие (6.14) не выполнено, то есть dx dτ + λ dt m dτ = 0. Определение 6.2. Если на кривой Γ, определяемой уравнениями x = x(τ), t = t(τ), выполнено соотношение dx(τ) dτ + λ m (x(τ), t(τ), ϕ(τ)) dt(τ) dτ = 0, (6.15) то кривая Γ называется характеристикой номера m, а собственное значение называется λ m характеристическим направлением или скоростью характеристики. Таким образом, в случае, когда Γ является характеристикой задача Коши (6.1), (6.6) может быть неразрешима, так как определитель D(τ) системы (6.12), обращается в нуль. Для того, чтобы задача Коши в этом случае имела смысл необходимо выполнение дополнительного условия разрешимости, которое легко получается из (6.12) при k = m с учетом (6.15) dt dτ f m lm i dϕ i = 0. (6.16) dτ 39
40 При выполнении условия (6.16) система (6.12), а следовательно и задача Коши, имеет бесконечное множество решений. Это позволяет сформулировать иное определение характеристки Определение 6.3. Кривая Γ называется характеристикой, если решение задачи Коши (6.1), (6.6) либо не существует, либо определено не единственным образом. Задача 6.1. Рассмотреть случай, когда в уравнениях (6.10), (6.11) производная dt/dτ = 0. Учесть условие x τ (τ) + t τ (τ) = 0 из (6.4). Задача 6.2. Записать условие разрешимости (6.16) в случае одного гиперболического уравнения. Задача 6.3. Привести пример задачи Коши для одного уравнения в случае, когда начальные данные заданы на характеристике. Задача 6.4. Для одного гиперболического уравнения сравнить определение характеристики 4.1 с определениями 6.2,
42 Определение 7.1. Говорят, что функция u(x, t) имеет слабый разрыв на линии x = ϕ(t), если функция на этой линии непрерывна, а ее производные имеют разрывы первого рода. Говорят, что u(x, t) имеет сильный разрыв на линии x = ϕ(t), если функция на этой линии имеет разрыв первого рода. Введем новую переменную θ = x ϕ(t). (7.5) Формально, строим решение (7.2) для уравнения (7.1) в виде ряда по степеням θ, считая коэффициенты ряда, зависящими от t w(x, t) = w 0 + w 1 (t)θ + w 2 (t)θ , θ 0. (7.6) Заметим, что условие непрерывности решения (7.3) при θ = 0, то есть при x = ϕ(t), выполнено автоматически. Подставляя (7.6) в функции A(u), b(u) и производя разложение в ряды по степеням θ, с учетом (7.4) получим b(w) = b(w 0 + w 1 θ + w 2 θ ) = b w iwi 1θ + O(θ 2 ), (7.7) A(w 0 ) = A(w 0 + w 1 θ + w 2 θ ) = A(w 0 ) + A w iwi 1θ + O(θ 2 ). (7.8) Здесь все производные вычислены при w = w 0. Кроме этого, для сокращения записи использовано правило суммирования по повторяющимся индексам, то есть b w iwi 1 b w 1. (7.9) iwi Напомним, что проще всего получить (7.7), (7.8) можно, формально вычисляя производные по θ от функций f(w 0 + w 1 θ + w 2 θ ). Можно еще уменьшить громоздкость записи, введя дополнительно обозначения w = w i wi. (7.10) 42
43 Тогда формулы (7.7), (7.8) записываются совсем коротко b(w) = θ w 1 b + O(θ 2 ), (7.11) A(w) = A(w 0 ) + θ w 1 A + O(θ 2 ). (7.12) Заметим, что t θ = ϕ t, x θ = 1. (7.13) Дифференцируя (7.6) по x, t, получим t w = ϕ t w 1 +θ t w 1 2θϕ t w 2 +O(θ 2 ), x w = w 1 +2θw 2 +O(θ 2 ). (7.14) Подставляя (7.11), (7.12), (7.14) в (7.1), имеем ϕ t w 1 + θ t w 1 2θϕ t w 2 + O(θ 2 ) + + ( A(w 0 ) + θ w 1 A + O(θ 2 ) ) (w 1 + 2θw 2 + O(θ 2 )) = = θ w 1 b + O(θ 2 ) Приравнивая члены при одинаковых степенях θ, выводим ϕ t w 1 + A(w 0 )w 1 = 0, (7.15) ϕ t w 2 + A(w 0 )w 2 = 1 2
44 Обратим внимание на связь полученных формул с формулами (5.9), (5.10), использованных при построении автомодельных решений. Для определения w 2 с учетом (7.17) имеем λ k (w 0 )w 2 + A(w 0 )w 2 = 1 2
45 Проанализируем полученные результаты. 1. Соотношение (7.17) означает, что линия x = ϕ(t) является характеристикой номера k (см. определение 6.2). 2. На линии x = ϕ(t) имеются разрывы производных (слабые разрывы), величина которых с учетом (7.2), (7.14), (7.17), (7.18) определяется соотношениями [u t ] x=ϕ(t) = u θ=+0 t u θ=+0 t = ϕ t w 1 = λ m (w 0 )r m (w 0 )M(t), (7.25) [u x ] x=ϕ(t) = u θ=+0 x u θ=+0 x = w 1 = r m (w 0 )M(t). (7.26) 3. «Интенсивность» слабых разрывов M(t) определяется уравнением (7.22), которое называется транспортным уравнением M t (t) αm(t) + βm 2 (t) = 0. (7.27) Если в начальный момент времени t = 0 задано M(0) = 0, то решение уравнения (7.27) будет M(t) 0. Для ненулевых начальных данных M(0) = M 0 0 уравнение сводится к линейному заменой M(t) = 1/y(t) y t + αy β = 0. Решением в этом случае будет αm 0 βm 0 + (α βm 0 )e αt, α 0, M(t) = M 0 βm 0 t + 1, α = 0, Отметим, что, формально, (7.28) справедливо и при M 0 = 0. (7.28) Замечание 7.4. Выражение (7.28) означает что M(t) не может обращаться в нуль за конечные интервалы времени, если только оно не равнялось нулю в начальный момент времени. Другими словами, слабый разрыв движется по характеристике и не может ни исчезнуть, ни возникнуть сам по себе он обязательно должен быть задан в начальный момент. 45
46 Замечание 7.5. Выражение (7.28) показывает, что при некоторых значениях параметров α, β, M 0 возможна градиентная катастрофа обращение производных u t, u x в бесконечность в конечный момент времени. Например, если α = 0, βm 0 0. См. также пример 4.2. Замечание 7.6. Задача о волновом фронте всегда имеет решение, по крайней мере формальное, в случае системы однородных уравнений (то есть b = 0). В этом случае условие (7.4) выполнено для любых w 0 и в транспортном уравнении (7.27), в силу (7.24) коэффициент α = 0. Пример 7.1. Будем строить решение задачи о волновом фронте для уравнений рассмотренных в примерах 2.2, 5.3 ( ) ( ) ( ) ( ) ( ) u 1 ρ ρ u ρ ρ u = =, + u 2 u u c 2 ρ 1 u u t x = 0, c > 0. Собственные значения, левые и правые собственные векторы матрицы A 11 = u, A 12 = ρ, A 21 = c 2 ρ 1, A 22 = u будут (см. примеры 1.2, 2.2, 5.3) λ 1 = u c, λ 2 = u + c, r 1 = (r1, 1 r1) 2 T = ( ρ, c) T, r 2 = (r2, 1 r2) 2 T = (ρ, c) T, l 1 = (l 1 1, l 2 1) = ( c, ρ), l 2 = (l 1 2, l 2 2) = (c, ρ). Вычислим производные матрицы A ( ) ( ) A u = u ρ 0 1 =, 1 ρ c 2 ρ 1 u c 2 ρ 2 0 ( ) ( ) A u = u ρ 1 0 =. 2 u c 2 ρ 1 u 0 1 Коэффициенты α, β транспортного уравнения (7.22) определяются формулами (7.23) или (7.24). Исходная система уравнений однородна (b = 0) и, следовательно, коэффициент α = 0. 46
47 Далее выберем в качестве w 0 некоторый постоянный вектор w 0 = (ρ 0, u 0 ) T и, для определенности, будем строить решение задачи, когда в соотношении (7.17) индекс k = 2 ϕ t = λ 2 (ρ 0, u 0 ) = u 0 + c. Пусть в начальный момент времени t = 0 слабый разрыв находился в точке x = x 0, то есть ϕ(0) = x 0. Тогда слабый разрыв будет двигаться с постоянной скоростью по закону (по характеристике λ 2 (ρ 0, u 0 )) Используя (7.23), (7.24), запишем ϕ(t) = x 0 + (u 0 + c) t. (r 2 A) = r j A 2 w = A j r1 2 w + A 1 r2 2 w = ρ A 2 ρ + c A u = j ( ) ( ) ( ) c ρ0 = ρ 0 + c =, c 2 ρ c 2 ρ 1 0 c ( ) ( ) ( ) c ρ0 ρ0 2cρ0 (r 2 A)r 2 = =, c 2 ρ 1 0 c c 0 ((r 2 A)r 2, l 2 ) = 2c 2 ρ 0, (r 2, l 2 ) = 2cρ 0, β = ((r k A)r k, l k ) (r k, l k ) Транспортное уравнение (7.27) имеет вид = c. и его решение будет (см. (7.28)) M t (t) + cm 2 (t) = 0 M(t) = M 0 cm 0 t
48 Поведение слабых разрывов описывается соотношениями (7.25), (7.26) [u t ] x=ϕ(t) = λ 2 (w 0 )r 2 (w 0 )M(t), [u x ] x=ϕ(t) = r 2 (w 0 )M(t). или [ρ t ] x=ϕ(t) = (u 0 + c)ρ 0 M(t), [ρ x ] x=ϕ(t) = ρ 0 M(t). [u t ] x=ϕ(t) = (u 0 + c)cm(t), [u x ] x=ϕ(t) = cm(t). 48
Квазилинейное уравнение
Сильные и слабые разрывы. При решении линейного уравнения переноса разрывы в решениях появляются в связи с разрывами либо в начальных, либо в граничных условиях. В квазилинейных уравнениях, даже при наличии гладкости в начальных и граничных условиях, решения могут стать разрывными. Исследуем вопрос об образовании разрывов на примере решения простейшего квазилинейного уравнения
 , (28)
, (28)
которое возникает при одномерном описании движения жидкости и газа. В уравнении переноса (28) скорость переноса определяется самим решением, т.е. c = u(t,x).
В дальнейшем будем рассматривать простейший случай уравнения (28), когда решение u знакопостоянно u(t,x) > 0 и граничное и начальное значения на положительных полуосях системы координат (t,x) полностью определяют решение в первом квадранте. Поскольку граничное и начальное значения передаются по характеристикам x — ut = const, а их наклон зависит от решения, постольку возможны такие начальные данные, при которых характеристики могут пересекаться, что приводит к появлению разрывных решений. С этой точки зрения существует четыре типа начальных данных.
Первый тип начальных данных. Начальные и граничные являются непрерывными функциями такими, что u(0,x) монотонно не убывает, а u(t,0) монотонно не возрастает и они непрерывно согласованы в начале координат.
Наклон (тангенс угла наклона к оси x) характеристик в каждой точке плоскости (t,x) равен 1/u(t,x). При данном типе начальных данных наклон монотонно и непрерывно убывает слева направо (рис.11,а). Первый квадрант всюду плотно покрыт характеристиками и через каждую точку проходит одна и только одна характеристика. По этим характеристикам в данную точку переносится либо граничное, либо начальное значения. Решение однозначно определено и непрерывно во всем квадранте.
Для примера возьмем следующие граничные и начальные условия
 ,
,
тогда характеристики, выходящие из точек (t,0), t Î [0,T] и (0,x), x Î [0,a], в окрестности этих точек удовлетворяют уравнениям:
 . (29)
. (29)
Решая уравнения (29), можно найти два класса приближенных характеристик, выходящих из граничного и начального условий, т.е.
 , (30)
, (30)
где t0, x0 — константы, пробегающие значения по отрезку [0,T] и отрезку [0,a] соответственно.
На листинге_№8 приведен код небольшой программы, которая изображает приближенные характеристики (30) в области G = [0,T]´[0,a]. Итог работы кода программы листинга_№8 приведен на рис.11,а. Стрелка на рис.11,а указывает общее направление переноса граничных и начальных условий.
%Программа рисования приближенных
%очищаем рабочее пространство
%задаем размеры области G=[0,T]x[0,a] и
%определяем набор значений констант t0 и x0
%рисуем характеристики, выходящие из
%левого граничного условия
%рисуем характеристики, выходящие из
 |  |  |
| Рис.11,а. Характеристики первого типа начальных данных | Рис.11,б. Характеристики второго типа начальных данных с пустой областью | Рис.11,в. Характеристики второго типа начальных данных с доопределенной пустой областью |
Второй тип начальных данных. Краевое и начальное значения монотонны как в первом случае, но имеют разрывы. Для упрощения ситуации положим
 (31)
(31)
На рис.11,б приведены соответствующие характеристики. В силу (31) характеристики приближенно можно представить прямыми линиями, которые имеют одинаковый наклон левее и правее точки разрыва x0. Из точки разрыва начальных данных x0 выходит две характеристики, выделенные на рис.11,б жирными стрелками красного цвета. Между этими линиями нет ни одной характеристики и решение в этой области не определено.
Потребуем, чтобы задача была корректной, т.е. устойчивой относительно бесконечно малых возмущений начальных данных. Для этого заменим разрыв в начальных данных на монотонный переход в бесконечно узком интервале. Тогда пустая область на рис.11,б будет заполнена набором характеристик, аналитический вид которых следующий:
 (32)
(32)
На рис.11,в приведен вид характеристик (две черные стрелки) в пустой области разрыва начальных данных. В итоге доопределения с помощью (32) решение непрерывно на всей плоскости, кроме точки (0,x0). Таким образом, разрыв начальных данных сглаживается со временем, но след разрыва остается. Этот след в виде разрыва производных передается по двум характеристикам, выходящим из точки разрыва x0. Во всех остальных точках решение будет гладким, если соответствующие граничные и начальные данные были гладкими.
Разрыв производных называют слабым разрывом решения. Слабые разрывы квазилинейного уравнения переносятся по характеристикам.
Третий тип начальных данных. Пусть нарушено условие монотонности, предполагаемое в двух предыдущих случаях. Положим, как и в (31),

но теперь a > b > 0. В этом случае характеристики будут иметь вид, представленный на рис.12,а.
В угле, образованном жирными (красными) стрелками, через каждую точку проходит две характеристики, каждая из которых приносит свое значение начальных данных, т.е. вне этого угла решение однозначно определено, а внутри угла решение однозначно не определено. В этом случае непрерывное решение построить не удается, т.е. решение должно быть разрывным или обобщенным решением дифференциального уравнения (28).
Обобщенное решение удовлетворяет некоторому интегральному уравнению, которое получается из специальной дивергентной формы записи дифференциального уравнения. Разные дивергентные формы записи одного и того же уравнения приводят к разным разрывным решениям, при этом гладкие решения для всех дивергентных форм одинаковы. Дивергентная форма, представляющая физический закон сохранения, определяет правильное решение, которое еще называют допустимым.
 |  |  |
| Рис.12,а. Характеристики третьего типа начальных данных | Рис.12,б. Построение обобщенного, разрывного решения | Рис.12,в. Обобщенное, разрывное решение и поле характеристик |
Квазилинейное уравнение переноса (28) легко переписать в одной из дивергентных форм:
 . (33)
. (33)
Нас интересует решение, имеющее единственный разрыв. Пусть наклон линии разрыва соответствует скорости V, и разрыв двигается как волна. Из вида характеристик на рис.12,а следует, что искомое разрывное решение должно иметь следующий вид:
Проинтегрируем дивергентную форму (33) по площади прямоугольника со сторонами t и h = Vt, и левый нижний угол которого находится в точке разрыва x0 (рис.12,б), тогда

откуда находим скорость распространения разрыва
 . (34)
. (34)
Разрыв решения называют сильным разрывом, а в газовой динамике такой разрыв называют ударной волной. Сильный разрыв квазилинейного уравнения переноса распространяется не по характеристике. Так, на рис.12,б жирная стрелка, по которой распространяется разрыв, не является характеристикой. В теории квазилинейных уравнений доказывается, что только обобщенное решение устойчиво относительно малых возмущений начальных данных.
Четвертый тип начальных данных. В этом случае функция начального условия u(0,x) непрерывна и убывает на некотором интервале, что переадресует нас к третьему типу. Пересечение характеристик также приводит к образованию сильного разрыва (рис.12,в), скорость которого описывается уравнением, подобным (34). Однако в этом случае скорость сильного разрыва может меняться.
Псевдовязкость. Основную трудность при расчетах по разностным схемам доставляют сильные разрывы решения. Прием по преодолению этой трудности состоит в том, чтобы внести в исходное уравнение такую “малую” добавку, чтобы исходные разрывные решения стали непрерывными и достаточно гладкими. Составляя для нового уравнения соответствующую разностную схему, можно получить нужное решение.
Гладкие решения характерны для уравнений с диссипативными членами типа диффузии, теплопроводности или вязкого трения. Добавляемый в исходное уравнение член, оказывающий выглаживающее воздействие, принято называть псевдовязкостью или искусственной, математической вязкостью.
Рассмотрим пример. Добавим в исходное квазилинейное уравнение (28) соответствующий член, тогда
 , (35)
, (35)
где третье слагаемое выступает в качестве псевдовязкости, а коэффициент e 2 считается малым.
Видно, что для гладких, дважды непрерывно-дифференцируемых функций решения уравнения (28) близки к решениям уравнения (35).
Поищем среди гладких решений уравнения (35) решение, напоминающее ударную волну:
http://docplayer.com/55665464-Kvazilineynye-giperbolicheskie-uravneniya.html
http://helpiks.org/7-57603.html