ЗАТУХАЮЩИЕ ГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ
МЕХАНИЧЕСКИЕ КОЛЕБАНИЯ.
ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ И ПОНЯТИЯ
Колебаниями называется вид движения физических тел или такие процессы, для которых характерна та или иная степень повторяемости во времени. Например, принципом повторяемости обладают: движения маятника и гитарной струны, голосовых связок и барабанной перепонки уха, колебания температуры воздуха и напряжения в электросети, изменение освещенности на улице в связи со сменой дня и ночи и т.д. Как видно из приведенных примеров, колебания имеют различное происхождение, иначе говоря, разную физическую природу: колебания механические, тепловые, электрические, электромагнитные, оптические и др.
Если повторяемость состояний колеблющейся системы имеет произвольный характер, то такие колебания называются апериодическими или непериодическими. Колебания, для которых последовательность состояний системы повторяется через равные промежутки времени, называются периодическими. В дальнейшем мы будем рассматривать в основном периодические колебания.
В зависимости от характера воздействия, оказываемого на колебательную систему извне, различают: свободные (или собственные) колебания и колебания вынужденные. По этому признаку различают еще автоколебания и параметрические колебания.
Свободными называются колебания, которые совершаются за счет внутренних сил системы, предоставленной самой себе после того, как ей был сообщён внешний первоначальный толчок, породивший эти колебания. Например, шарик на нити.
Вынужденными называются колебания, которые совершаются под постоянным воздействием внешней переменной силы. Например, колебания моста, когда по нему идут пешеходы.
Если с течением времени запас энергии колебательной системы не меняется, то такое колебание называется незатухающим. Если же эта энергия уменьшается, то – затухающим.
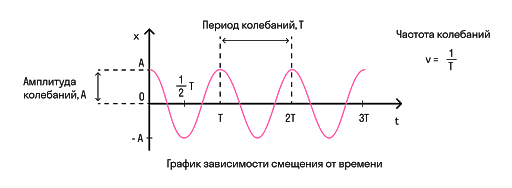
Независимо от природы, все виды колебательного движения имеют общие закономерности, т.е. протекают по одним и тем же законам и характеризуются одними и теми же параметрами: периодом Т, частотой ν, амплитудой А и фазой φ.
Закон колебательного движения – это уравнение, которое показывает, как с течением времени изменяются параметры, описывающие состояния колеблющегося тела. Простейшими являются гармонические колебания, для которых изменение величин, описывающих состояние системы, происходит по закону синуса или косинуса. Этот вид колебаний особенно важен, т.к. в природе и в практической сфере колебания очень часто имеют характер близкий к гармоническому или могут быть представлены как сумма нескольких простых гармонических колебаний.
ГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ
Получим закон гармонических колебаний на примере механического движения механических колебаний. Это вид колебаний, при котором тело поочерёдно и многократно совершает отклонения от своего положения равновесия в одну и другую сторону.
 Рассмотрим колебания пружинного маятника вдоль горизонтальной оси при отсутствии силы сопротивления. Пружинный маятник представляет собой массивный шарик массой m, прикрепленный к пружине с ничтожно малой массой и жесткостью k. Другой конец пружины закреплен неподвижно. Если вывести шарик из равновесия и отпустить, то под воздействием силы упругости деформированной пружины система пружина–шарик придет в колебательное движение. Положение шарика на оси будем определять смещением s, т.е. расстоянием от положения равновесия до шарика (рис.1). Наша цель решить основную задачу механики – найти ответ на вопрос: где будет находиться тело в произвольный момент времени t, т.е. найти вид функции s = f(t)?
Рассмотрим колебания пружинного маятника вдоль горизонтальной оси при отсутствии силы сопротивления. Пружинный маятник представляет собой массивный шарик массой m, прикрепленный к пружине с ничтожно малой массой и жесткостью k. Другой конец пружины закреплен неподвижно. Если вывести шарик из равновесия и отпустить, то под воздействием силы упругости деформированной пружины система пружина–шарик придет в колебательное движение. Положение шарика на оси будем определять смещением s, т.е. расстоянием от положения равновесия до шарика (рис.1). Наша цель решить основную задачу механики – найти ответ на вопрос: где будет находиться тело в произвольный момент времени t, т.е. найти вид функции s = f(t)?
Примем за начало отсчета точку 0, в которой находится центр шарика в равновесном состоянии системы, т.е. при отсутствии деформации в пружине. Пусть в момент времени t шарик находится на расстоянии s от положения равновесия. Характер движения в данный момент времени определяется равнодействующей приложенных к шарику сил:  . Т.к. трение по условию отсутствует, а сила тяжести
. Т.к. трение по условию отсутствует, а сила тяжести  перпендикулярна стержню, то характер движения будет определяться только силой упругости деформированной пружины:
перпендикулярна стержню, то характер движения будет определяться только силой упругости деформированной пружины:
 . (1)
. (1)
В соответствии со 2-ым законом Ньютона эта сила сообщает шарику ускорение  , тогда в скалярном виде (1) можно записать:
, тогда в скалярном виде (1) можно записать:
 , (2)
, (2)
но т.к. a = d 2 s /dt 2 , то
 . (3)
. (3)
Разделим правую и левую часть (3) на m и обозначим k/m =  . Сгруппировав все члены в левой части равенства, получим дифференциальное уравнение гармонических колебаний.
. Сгруппировав все члены в левой части равенства, получим дифференциальное уравнение гармонических колебаний.
 или
или  . (4)
. (4)
Это дифференциальное уравнение второго порядка с постоянными коэффициентами. Его характеристическое уравнение: к 2 +  = 0, корни которого к1,2 = ±iω0 – мнимые числа. Тогда общим решением (4) будет:
= 0, корни которого к1,2 = ±iω0 – мнимые числа. Тогда общим решением (4) будет:
Для любых С1 и С2 всегда можно подобрать другие произвольные постоянные А и φ0 такие, что С1 = Аsin φ0,1 а С2 = Аcosφ0,1, Тогда общее решение (5) примет вид:
Если выражения для С1 и C2 поменять местами (С1 = Аcosφ0,2 а С2 = Аsin φ0,2), то общее решение будет иметь вид:
Данные функции (6) и (7) и есть искомые кинематические уравнения гармонического колебания. Аргумент этой функции (w0t + φ0) называется фазой колебания; j0 – постоянная составляющая фазы называется начальной фазой;  – собственная циклическая (круговая) частота колебаний данного пружинного маятника (
– собственная циклическая (круговая) частота колебаний данного пружинного маятника (  ,
,  , тогда
, тогда  ); А – амплитуда колебаний, в данном случае максимальное значение смещения s. В общем случае, амплитуда А – это наибольшее значение величины, изменение которой с течением времени выбрали для описания изучаемых колебаний. Графики гармонического колебания представляют собой синусоиды (рис.2):
); А – амплитуда колебаний, в данном случае максимальное значение смещения s. В общем случае, амплитуда А – это наибольшее значение величины, изменение которой с течением времени выбрали для описания изучаемых колебаний. Графики гармонического колебания представляют собой синусоиды (рис.2):
 Получим уравнения, описывающие изменения скорости и ускорения тела, совершающего гармонические колебания. Пусть s = Аcos(ω0t + φ0), тогда:
Получим уравнения, описывающие изменения скорости и ускорения тела, совершающего гармонические колебания. Пусть s = Аcos(ω0t + φ0), тогда:
 , (8)
, (8)
 . (9)
. (9)
 Как видно, скорость и ускорение тоже изменяются по гармоническим законам, но скорость опережает по фазе смещение на p/2, а ускорение на p (рис.3), т.е. ускорение находится в противофазе со смещением. В целом, тела, на которые действуют равнодейству-ющие вида F = -ks (такие силы называются квазиупругими), будут совершать гармонические колебания.
Как видно, скорость и ускорение тоже изменяются по гармоническим законам, но скорость опережает по фазе смещение на p/2, а ускорение на p (рис.3), т.е. ускорение находится в противофазе со смещением. В целом, тела, на которые действуют равнодейству-ющие вида F = -ks (такие силы называются квазиупругими), будут совершать гармонические колебания.
Рассмотрим процесс колебательного движения с энергетической точки зрения. Смещая тело из положения равновесия, мы деформируем пружину, сообщая тем самым системе запас потенциальной энергии. Отпустив тело, мы даем ему возможность двигаться к положению равновесия. При этом потенциальная энергия системы превращается в кинетическую. В момент прохождения положения равновесия потенциальная энергия полностью превращается в кинетическую. Продолжая движение по инерции, тело опять деформирует пружину, т.е. кинетическая энергия начинает превращаться в потенциальную. В момент, когда кинетическая энергия полностью превра  тится в потенциальную, смещение достигнет амплитудного значения, тело остановится и начнет двигаться обратно. Опять потенциальная энергия будет превращаться в кинетическую и т.д. (рис.4). Т.о., с точки зрения энергетической, механическое колебание – это процесс многократных, последовательных превращений потенциальной энергии в кинетическую и обратно.
тится в потенциальную, смещение достигнет амплитудного значения, тело остановится и начнет двигаться обратно. Опять потенциальная энергия будет превращаться в кинетическую и т.д. (рис.4). Т.о., с точки зрения энергетической, механическое колебание – это процесс многократных, последовательных превращений потенциальной энергии в кинетическую и обратно.
 , (10)
, (10)
 , (11)
, (11)
 , (12)
, (12)
т.е. полная энергия системы величина постоянная.
ЗАТУХАЮЩИЕ ГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ
В реальных условиях, кроме возвращающей силы в колебательной системе обязательно будет действовать и сила сопротивления. Будем считать, что скорости движения при колебаниях будут небольшими, тогда сила сопротивления прямо пропорциональна скорости:
 , (13)
, (13)
где r –коэффициент сопротивления. Учитывая только силу сопротивления (13) и силу упругости (1) согласно II закону Ньютона для уравнения движения получим:
 , (14)
, (14)
 . (15)
. (15)
Разделив правую и левую часть (15) на m и обозначив k/m =  , а r/m = 2β, получим:
, а r/m = 2β, получим:
 или
или  . (16).
. (16).
Это однородное дифференциальное уравнение второго порядка с постоянными коэффициентами. Его характеристическое уравнение:
к 2 + 2b·к + w  = 0 имеет корни
= 0 имеет корни  . (17)
. (17)
Из (17) видно, что движение будет колебательным, только если b 2 — β t (С1cosωt + C2sinωt).
Заменяя С1 и С2 через другие постоянные А0 и φ0 такие, что С1 = А0cosφ0, а С2 = А0sinφ0 окончательно получим:
 Это уравнение свободных затухающих колебаний, график которых представлен на рис.5. Как видно амплитуда свободных затухающих колебаний убывает по экспоненциальному закону:
Это уравнение свободных затухающих колебаний, график которых представлен на рис.5. Как видно амплитуда свободных затухающих колебаний убывает по экспоненциальному закону:
(рис.5, пунктирная линия). Круговая частота этого колебания w =  , а период Т = 2π /
, а период Т = 2π /  . Как видно, ни частота, ни период затухающих колебаний не равны соответствующим параметрам собственных колебаний системы.
. Как видно, ни частота, ни период затухающих колебаний не равны соответствующим параметрам собственных колебаний системы.
Для описания быстроты затухания колебаний используют три взаимосвязанные величины: коэффициент затухания – β, декремент затухания – δ и логарифмический декремент затухания – λ. Коэффициент затухания b =  , [b] = 1/с. Декремент затухания –
, [b] = 1/с. Декремент затухания –
 (20)
(20)
и логарифмический декремент затухания
l = ℓnd = ℓnе βТ = βТ. (21)
ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
Свободные колебания в силу наличия трения всегда будут затухающими. Чтобы колебания были незатухающими необходимо компенсировать потери энергии. Если рассматривать механические колебания, то роль фактора восполняющего эти потери может играть внешняя переменная сила, которую называют вынуждающей.
Лекция №8. МЕХАНИЧЕСКИЕ КОЛЕБАНИЯ
5.6. Затухающие гармонические колебания.
Во всякой реальной колебательной системе имеются силы сопротивления, действие которых приводит к уменьшению энергии системы. Если убыль энергии не восполняется за счет работы внешних сил, то колебания будут затухать. Затухающие колебания − это колебания, амплитуда которых из-за потерь энергии реальной колебательной системой с течением времени уменьшается. В простейшем, и вместе с тем наиболее часто встречающемся случае, сила сопротивления, вызывающая затухание, зависит от скорости колебательного движения, т. е. ее можно считать прямо пропорциональной скорости

где μ − постоянная, называемая коэффициентом сопротивления.
Знак «минус» обусловлен тем, что сила и скорость имеют противоположные направления. Тогда второй закон Ньютона для гармонических колебаний при наличии сил сопротивления имеет вид

Учитывая , что a= $$d^2x\over dt^2$$ , а υ= $$dx\over dt$$ и разделив на массу m , получим

Применив обозначения $$

дифференциальное уравнение затухающих колебаний . Отметим, что ω0 представляет собой ту частоту, с которой совершались бы свободные колебания системы в отсутствие сопротивления среды. Эта частота называется собственной частотой .
Для решения уравнения (5.6.4) сделаем подстановку

Проведем замену переменных

Подставим (5.6.5 и 5.6.6) в выражение (5.6.4)

Преобразуем , сократив на e -βt


Рассмотрим случай, когда сопротивление среды настолько мало, что ω0 2 -β 2 >0 есть величина положи мы можем ввести тельная, и обозначение ω0 2 -β 2 =ω 2 , после чего уравнение (5.6.8) примает вид

В случае большого сопротивления среды ω0 2 -β 2 , движение становится непериодическим.
Решение уравнения (5.6.8) можно записать в виде

Окончательно, подставляя последнее уравнение в выражение (5.6.5), получаем общее решение дифференциального уравнения затухающих колебаний (5.6.4)

В соответствии с видом полученной функции движение можно рассматривать как гармоническое колебание с частотой


и амплитудой, изменяющейся по закону

На рисунке показан график данной функции. Пунктирными линиями показаны пределы, в которых находится смещение колеблющейся точки. Верхняя из пунктирных кривых дает график функции A(t) , причем величина A0 представляет собой амплитуду в начальный момент времени. Начальное смещение зависит от A0 и также от начальной фазы φ , т.е. x0=A0cosφ .
5.7. Коэффициент затухания и логарифмический декремент затухания.
Отношение значений амплитуд, соответствующих моментам времени, отличающимся на период, равно

и называется декрементом затухания .
Для характеристики системы обычно используется колебательной логарифмический декремент затухания , т.е. логарифм декремента затухания

Скорость затухания колебаний определяется величиной называем коэффициентом затухания $$β=<μ\over 2m>$$ .
Найдем время, называемое временем релаксации τ , за которое амплитуда уменьшается в e раз


т. е. коэффициент затухания обратен по величине промежутку времени, за который амплитуда колебаний уменьшается в e раз.
За время релаксации τ система успевает совершить $$N_e=<τ\over T>$$ колебаний

Следовательно, $$δ=<1\over N_e>$$ логарифмический декремент затухания обратно пропорционален по величине числу колебаний, за которые амплитуда колебаний уменьшается в e раз.
Для характеристики колебательной системы используется величина

которая называется добротностью колебательной системы.
Величина Q , пропорциональная числу колебаний, совершаемых системой за время, в течение которого амплитуда колебаний уменьшается в e раз.
5.8. Вынужденные колебания.
До сих пор мы рассматривали свободные колебания, когда выведенная из положения равновесия система совершает колебания будучи предоставленной самой себе. Рассмотрим колебательную систему, которая подвергается действию внешней силы, изменяющейся по гармоническому закону F=F0cosωt . Колебания, возникающие под действием внешней периодически изменяющейся силы, называются вынужденными колебаниями . В этом случае уравнение второго закона Ньютона имеет вид

Учитывая , что a= $$d^2x\over dt^2$$ , а υ= $$dx\over dt$$ и разделив на массу m , получим

Применив обозначения $$

дифференциальное уравнение вынужденных колебаний.
Будем искать решение уравнения (5.8.3) в виде

предполагая, что результирующее колебание будет совершаться с частотой внешней вынуждающей силы.

Подставим (5.8.4) и (5.8.5) в уравнение (5.8.3)




Чтобы уравнение (69) обратилось в тождество необходимо, чтобы коэффициенты при cosωt и sinωt были равны нулю.

Из выражения (71) получаем

Возведем в квадрат уравнения (70) и сложим


Подставив полученные выражения (71) и (73) в выражение (64) получим уравнение вынужденных колебаний

5.9. Резонанс.
Зависимость амплитуды вынужденных колебаний от частоты вынуждающей силы приводит к тому, что при некоторой частоте амплитуда колебаний достигает максимального значения.
Явление резкого возрастания амплитуды вынужденных колебаний при приближении частоты вынуждающей силы к частоте, равной или близкой собственной частоте колебательной системы называется резонансом , а соответствующая частота − резонансной частотой.
Найдем резонансную частоту. Амплитуда вынужденных колебаний будет max, когда выражение $$(ω_0<^2>-ω^2)^2 + 4β^2ω^2$$ в уравнении $$A=
Продифференцируем это выражение по ω и приравняем к нулю

Полученное уравнение имеет три решения: ω=0 и ω=± $$\sqrt <ω_0<^2>-2β^2>$$ . 2 . Первое решение соответствует максимуму знаменателя. Из остальных двух решений отрицательное не имеет физического смысла (частота не может быть отрицательной). Таким образом, резонансная циклическая частота

Подставив это значение в выражение для амплитуды (5.8.13), получим выражение для амплитуды при резонансе

Из последнего уравнения (5.9.3) следует, что при отсутствии сопротивления среды амплитуда при резонансе обращалась бы в бесконечность, а резонансная частота, согласно (5.9.2), при тех же условиях (при β=0 ), совпадала бы с собственной частотой колебаний системы ω0

Зависимость амплитуды вынужденных колебаний от частоты вынуждающей силы показана графически на рис. 5.9.1. В соответствии с (5.9.2) и (5.9.3), чем меньше параметр β , тем выше и правее лежит максимум данной кривой. Изображенная на рис. 5.9.1 совокупность графиков функций (5.8.13), соответствующих различным значениям параметра β , называется резонансными кривыми .

При стремлении ω к нулю все кривые приходят к одному и тому же, отличному от нуля, предельному значению, равному f0ω0 2 . Это значение представляет собой смещение из положения равновесия, которое получает система под действием постоянной силы величины F0
При стремлении ω к бесконечности все кривые асимптотически стремятся к нулю, так как при большой частоте сила так быстро изменяет свое направление, что система не успевает заметно сместиться из положения равновесия.
Наконец, отметим, что чем меньше β , тем сильнее изменяется с частотой амплитуда вблизи резонанса, тем «острее» получается максимум. При малом затухании (т. е. β ) амплитуда при резонансе приближенно равна Apes≈f0/2βω0 . Разделим это выражение на смещение x0 из положения равновесия под действием постоянной силы F0 , равное x0=f0/ωp 2 . В результате получим

где δ = βТ – логарифмический декремент затухания (5.7.2); Q – добротность колебательной системы (5.7.6).
Таким образом, добротность Q показывает, во сколько раз амплитуда в момент резонанса превышает смещение системы из положения равновесия под действием постоянной силы той же величины, что и амплитуда вынуждающей силы. Следует отметить, что это справедливо лишь при небольшом затухании.
Гармонические колебания
О чем эта статья:
9 класс, 11 класс, ЕГЭ/ОГЭ
Статья находится на проверке у методистов Skysmart.
Если вы заметили ошибку, сообщите об этом в онлайн-чат
(в правом нижнем углу экрана).
Механические колебания
Механические колебания — это физические процессы, которые точно или приблизительно повторяются через одинаковые интервалы времени.
Колебания делятся на два вида: свободные и вынужденные.
Свободные колебания
Это колебания, которые происходят под действием внутренних сил в колебательной системе.
Они всегда затухающие, потому что весь запас энергии, сообщенный в начале, в конце уходит на совершение работы по преодолению сил трения и сопротивления среды (в этом случае механическая энергия переходит во внутреннюю). Из-за этого свободные колебания почти не имеют практического применения.
Вынужденные колебания
А вот вынужденные колебания восполняют запас энергии внешним воздействием. Если это происходит каждый период, то колебания вообще затухать не будут.
Вынужденные колебания — это колебания, которые происходят под действием внешней периодически меняющейся силы.
Частота, с которой эта сила воздействует, равна частоте, с которой система будет колебаться.
Например, качели. Если вас кто-то будет на них качать, каждый раз давая толчок, когда вы приходите в одну и ту же точку — такое колебание будет считаться вынужденным.
Это колебание все еще будет считаться вынужденным, если вас будут раскачивать из положения равновесия. Просто в данном случае амплитуда (о которой речь пойдет чуть ниже) будет увеличиваться с каждым колебанием.
Автоколебания
Иногда вынужденному колебанию не нужно внешнего воздействия, чтобы случиться. Бывают такие системы, в которых это внешние воздействие возникает само из-за способности регулировать поступление энергии от постоянного источника.
У автоколебательной системы есть три важных составляющих:
- сама колебательная система
- источник энергии
- устройство обратной связи, обеспечивающей связь между источником и системой
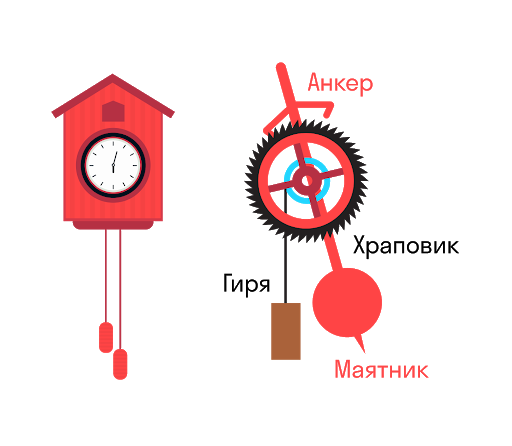
Часы с кукушкой — пример автоколебательной системы. Гиря на ниточке (цепочке) стремится вращать зубчатое колесо (храповик). При колебаниях маятника анкер цепляет за зубец, и вращение приостанавливается.
Но в результате маятник получает толчок, компенсирующий потери энергии из-за трения. Потенциальная энергия гири, которая постепенно опускается, расходуется на поддержание незатухающих колебаний.
Характеристики колебаний
Чтобы перейти к гармоническим колебаниям, нам нужно описать величины, которые помогут нам эти колебания охарактеризовать. Любое колебательное движение можно описать величинами: период, частота, амплитуда, фаза колебаний.
Период — это время одного полного колебания. Измеряется в секундах и обозначается буквой T.
Формула периода колебаний
T = t/N
N — количество колебаний [—]
Также есть величина, обратная периоду — частота. Она показывает, сколько колебаний совершает система в единицу времени.
Формула частоты
ν = N/t = 1/T
N — количество колебаний [—]
Амплитуда — это максимальное отклонение от положения равновесия. Измеряется в метрах и обозначается либо буквой A, либо x max .
Она используется в уравнении гармонических колебаний:
Гармонические колебания
Простейший вид колебательного процесса — простые гармонические колебания, которые описывают уравнением:
Уравнение гармонических колебаний
x — координата в момент времени t [м]
t — момент времени [с]
(2πνt) в этом уравнении — это фаза. Ее обозначают греческой буквой φ
Фаза колебаний
t — момент времени [с]
Фаза колебаний — это физическая величина, которая показывает отклонение точки от положения равновесия. Посмотрите на рисунок, на нем изображены одинаковые фазы:
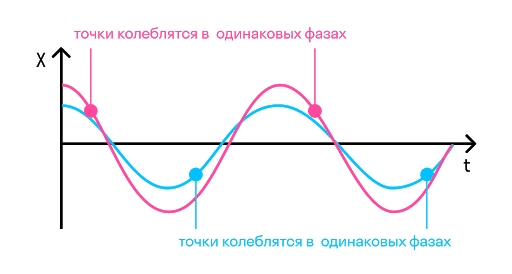
Например, в тех же самых часах с кукушкой маятник совершает колебания. Он качается слева направо и приходит в самую правую точку. В той же фазе он будет находиться, когда придет в ту же точку, идя справа налево. Если мы возьмем точку на сантиметр левее самой правой, то идя в нее не слева направо, а справа налево, мы получим уже другую фазу.
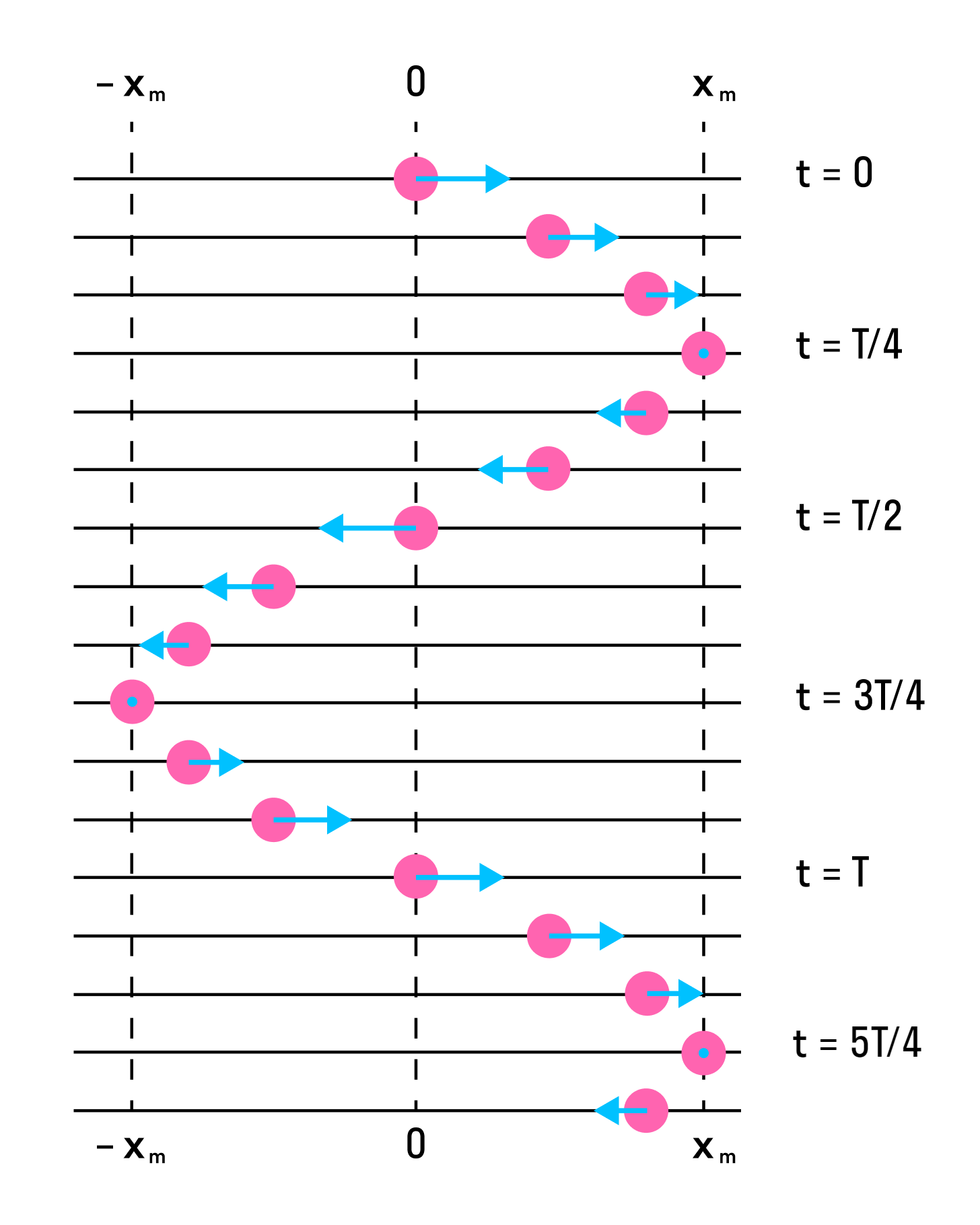
На рисунке ниже показаны положения тела через одинаковые промежутки времени при гармонических колебаниях. Такую картину можно получить при освещении колеблющегося тела короткими периодическими вспышками света (стробоскопическое освещение). Стрелки изображают векторы скорости тела в различные моменты времени.
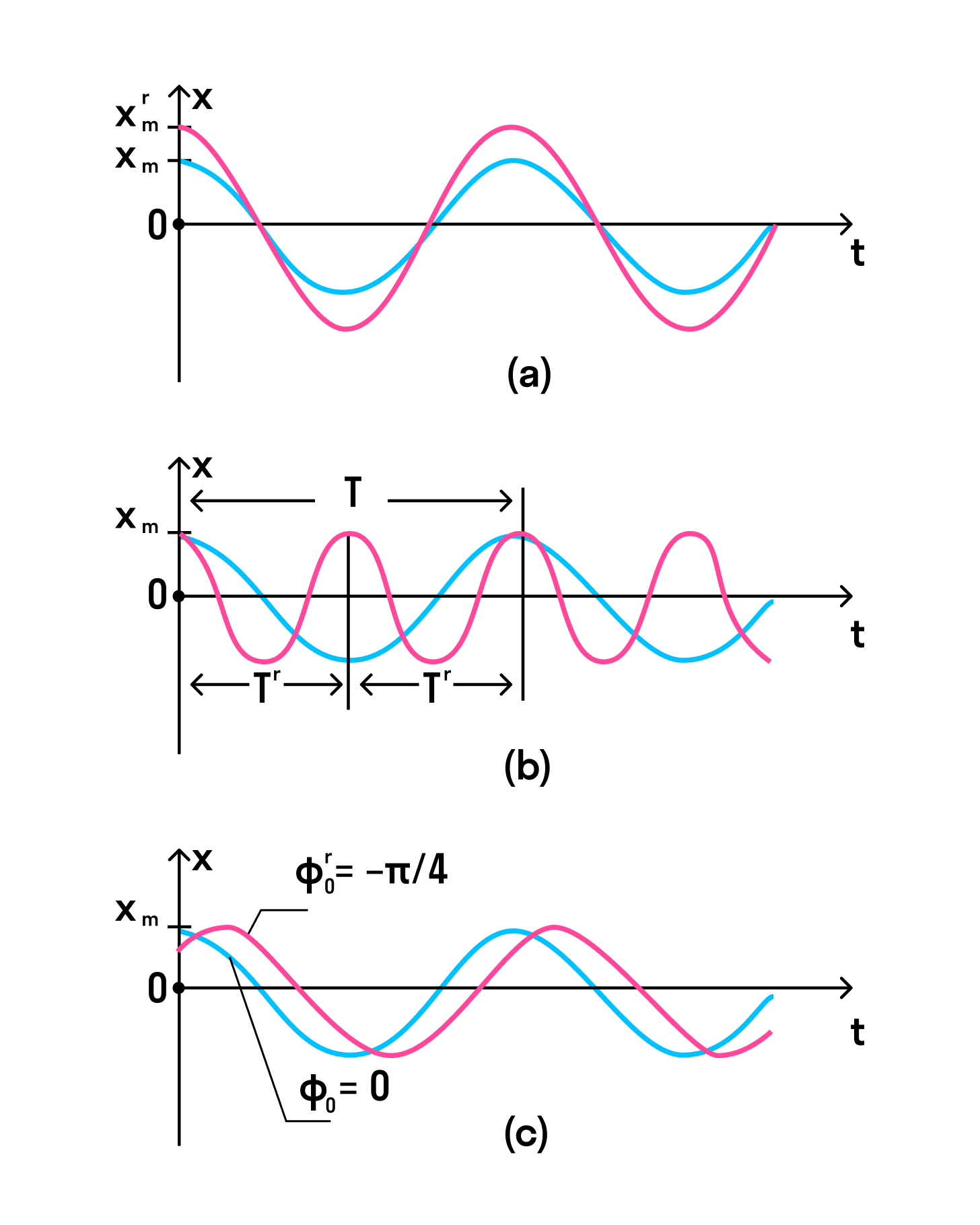
Если изменить период, начальную фазу или амплитуду колебания, графики тоже изменятся.
На рисунке ниже во всех трех случаях для синих кривых начальная фаза равна нулю, а в последнем (с) — красная кривая имеет меньшую начальную фазу.
В первом случае (а) красная кривая описывает колебание, у которого амплитуда больше колебания, описанного синей линией.
Во втором случае (b) красная кривая отличается от синей только значением периода — у красной период в два раза меньше.
Математический маятник
Математический маятник — отличный пример гармонических колебаний. Если мы подвесим шарик на нити, то это еще не будет математическим маятником — пока он только физический.
Математическим этот маятник станет, если размеры шарика много меньше длины нити (тогда этими размерами можно пренебречь и рассматривать шарик как материальную точку), растяжение нити очень мало, а масса нити во много раз меньше массы шарика.
Математическим маятником называется система, которая состоит из материальной точки массой m и невесомой нерастяжимой нити длиной l, на которой материальная точка подвешена, и которая находится в поле силы тяжести (или других сил).
Период малых колебаний математического маятника в поле силы тяжести Земли определяется по формуле:
Формула периода колебания математического маятника
l — длина нити [м]
g — ускорение свободного падения [м/с 2 ]
На планете Земля g = 9,8 м/с 2
Пружинный маятник
Пружинный маятник — это груз, прикрепленный к пружине, массой которой можно пренебречь.
В пружинном маятнике колебания совершаются под действием силы упругости.
Пока пружина не деформирована, сила упругости на тело не действует.
Формула периода колебания пружинного маятника
m — масса маятника [кг]
k — жесткость пружины [Н/м]
Закон сохранения энергии для гармонических колебаний
Физика — такая клевая наука, в которой ничего не исчезает бесследно и не появляется из ниоткуда. Эту особенность описывает закон сохранения энергии.
Рассмотрим его на примере математического маятника.
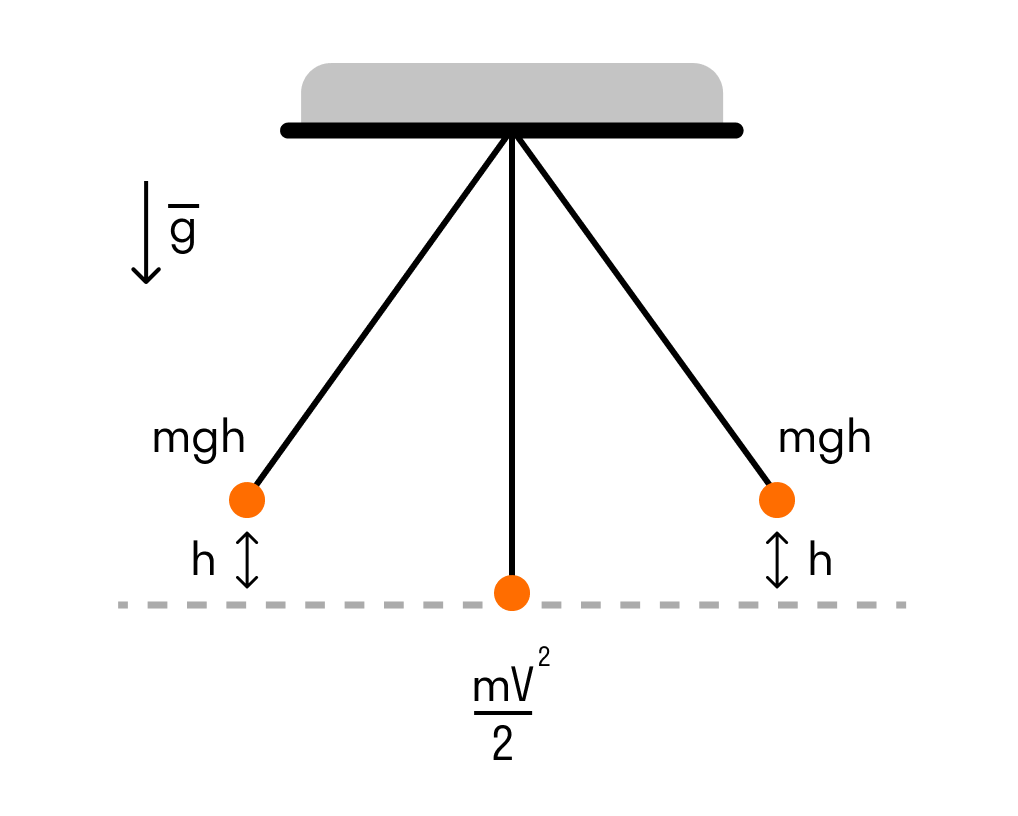
- Когда маятник отклоняют на высоту h, его потенциальная энергия максимальна.
- Когда маятник опускается, потенциальная энергия переходит в кинетическую. Причем в нижней точке, где потенциальная энергия равна нулю, кинетическая энергия максимальна и равна потенциальной энергии в верхней точке. Скорость груза в этой точке максимальна.
Онлайн-курсы физики в Skysmart не менее увлекательны, чем наши статьи!
http://physics.belstu.by/mechanics_lk/mechanics_lk8.html
http://skysmart.ru/articles/physics/garmonicheskie-kolebaniya